 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhen Life Gives You BC, Make Q-functions: Extracting Q-values from Behavior Cloning for On-Robot Reinforcement Learning
May 06, 2026Behavior Cloning (BC) has emerged as a highly effective paradigm for robot learning. However, BC lacks a self-guided mechanism for online improvement after demonstrations have been collected. Existing offline-to-online learning methods often cause policies to replace previously learned good actions due to a distribution mismatch between offline data and online learning. In this work, we propose Q2RL, Q-Estimation and Q-Gating from BC for Reinforcement Learning, an algorithm for efficient offline-to-online learning. Our method consists of two parts: (1) Q-Estimation extracts a Q-function from a BC policy using a few interaction steps with the environment, followed by online RL with (2) Q-Gating, which switches between BC and RL policy actions based on their respective Q-values to collect samples for RL policy training. Across manipulation tasks from D4RL and robomimic benchmarks, Q2RL outperforms SOTA offline-to-online learning baselines on success rate and time to convergence. Q2RL is efficient enough to be applied in an on-robot RL setting, learning robust policies for contact-rich and high precision manipulation tasks such as pipe assembly and kitting, in 1-2 hours of online interaction, achieving success rates of up to 100% and up to 3.75x improvement against the original BC policy. Code and video are available at https://pages.rai-inst.com/q2rl_website/
You've Got a Golden Ticket: Improving Generative Robot Policies With A Single Noise Vector
Mar 16, 2026What happens when a pretrained generative robot policy is provided a constant initial noise as input, rather than repeatedly sampling it from a Gaussian? We demonstrate that the performance of a pretrained, frozen diffusion or flow matching policy can be improved with respect to a downstream reward by swapping the sampling of initial noise from the prior distribution (typically isotropic Gaussian) with a well-chosen, constant initial noise input -- a golden ticket. We propose a search method to find golden tickets using Monte-Carlo policy evaluation that keeps the pretrained policy frozen, does not train any new networks, and is applicable to all diffusion/flow matching policies (and therefore many VLAs). Our approach to policy improvement makes no assumptions beyond being able to inject initial noise into the policy and calculate (sparse) task rewards of episode rollouts, making it deployable with no additional infrastructure or models. Our method improves the performance of policies in 38 out of 43 tasks across simulated and real-world robot manipulation benchmarks, with relative improvements in success rate by up to 58% for some simulated tasks, and 60% within 50 search episodes for real-world tasks. We also show unique benefits of golden tickets for multi-task settings: the diversity of behaviors from different tickets naturally defines a Pareto frontier for balancing different objectives (e.g., speed, success rates); in VLAs, we find that a golden ticket optimized for one task can also boost performance in other related tasks. We release a codebase with pretrained policies and golden tickets for simulation benchmarks using VLAs, diffusion policies, and flow matching policies.
Smoothness Errors in Dynamics Models and How to Avoid Them
Feb 05, 2026Modern neural networks have shown promise for solving partial differential equations over surfaces, often by discretizing the surface as a mesh and learning with a mesh-aware graph neural network. However, graph neural networks suffer from oversmoothing, where a node's features become increasingly similar to those of its neighbors. Unitary graph convolutions, which are mathematically constrained to preserve smoothness, have been proposed to address this issue. Despite this, in many physical systems, such as diffusion processes, smoothness naturally increases and unitarity may be overconstraining. In this paper, we systematically study the smoothing effects of different GNNs for dynamics modeling and prove that unitary convolutions hurt performance for such tasks. We propose relaxed unitary convolutions that balance smoothness preservation with the natural smoothing required for physical systems. We also generalize unitary and relaxed unitary convolutions from graphs to meshes. In experiments on PDEs such as the heat and wave equations over complex meshes and on weather forecasting, we find that our method outperforms several strong baselines, including mesh-aware transformers and equivariant neural networks.
DeepWeightFlow: Re-Basined Flow Matching for Generating Neural Network Weights
Jan 08, 2026Building efficient and effective generative models for neural network weights has been a research focus of significant interest that faces challenges posed by the high-dimensional weight spaces of modern neural networks and their symmetries. Several prior generative models are limited to generating partial neural network weights, particularly for larger models, such as ResNet and ViT. Those that do generate complete weights struggle with generation speed or require finetuning of the generated models. In this work, we present DeepWeightFlow, a Flow Matching model that operates directly in weight space to generate diverse and high-accuracy neural network weights for a variety of architectures, neural network sizes, and data modalities. The neural networks generated by DeepWeightFlow do not require fine-tuning to perform well and can scale to large networks. We apply Git Re-Basin and TransFusion for neural network canonicalization in the context of generative weight models to account for the impact of neural network permutation symmetries and to improve generation efficiency for larger model sizes. The generated networks excel at transfer learning, and ensembles of hundreds of neural networks can be generated in minutes, far exceeding the efficiency of diffusion-based methods. DeepWeightFlow models pave the way for more efficient and scalable generation of diverse sets of neural networks.
Discovering Lie Groups with Flow Matching
Dec 23, 2025Symmetry is fundamental to understanding physical systems, and at the same time, can improve performance and sample efficiency in machine learning. Both pursuits require knowledge of the underlying symmetries in data. To address this, we propose learning symmetries directly from data via flow matching on Lie groups. We formulate symmetry discovery as learning a distribution over a larger hypothesis group, such that the learned distribution matches the symmetries observed in data. Relative to previous works, our method, \lieflow, is more flexible in terms of the types of groups it can discover and requires fewer assumptions. Experiments on 2D and 3D point clouds demonstrate the successful discovery of discrete groups, including reflections by flow matching over the complex domain. We identify a key challenge where the symmetric arrangement of the target modes causes ``last-minute convergence,'' where samples remain stationary until relatively late in the flow, and introduce a novel interpolation scheme for flow matching for symmetry discovery.
On Uncertainty Calibration for Equivariant Functions
Oct 27, 2025



Data-sparse settings such as robotic manipulation, molecular physics, and galaxy morphology classification are some of the hardest domains for deep learning. For these problems, equivariant networks can help improve modeling across undersampled parts of the input space, and uncertainty estimation can guard against overconfidence. However, until now, the relationships between equivariance and model confidence, and more generally equivariance and model calibration, has yet to be studied. Since traditional classification and regression error terms show up in the definitions of calibration error, it is natural to suspect that previous work can be used to help understand the relationship between equivariance and calibration error. In this work, we present a theory relating equivariance to uncertainty estimation. By proving lower and upper bounds on uncertainty calibration errors (ECE and ENCE) under various equivariance conditions, we elucidate the generalization limits of equivariant models and illustrate how symmetry mismatch can result in miscalibration in both classification and regression. We complement our theoretical framework with numerical experiments that clarify the relationship between equivariance and uncertainty using a variety of real and simulated datasets, and we comment on trends with symmetry mismatch, group size, and aleatoric and epistemic uncertainties.
SE(3)-Equivariant Diffusion Policy in Spherical Fourier Space
Jul 02, 2025Diffusion Policies are effective at learning closed-loop manipulation policies from human demonstrations but generalize poorly to novel arrangements of objects in 3D space, hurting real-world performance. To address this issue, we propose Spherical Diffusion Policy (SDP), an SE(3) equivariant diffusion policy that adapts trajectories according to 3D transformations of the scene. Such equivariance is achieved by embedding the states, actions, and the denoising process in spherical Fourier space. Additionally, we employ novel spherical FiLM layers to condition the action denoising process equivariantly on the scene embeddings. Lastly, we propose a spherical denoising temporal U-net that achieves spatiotemporal equivariance with computational efficiency. In the end, SDP is end-to-end SE(3) equivariant, allowing robust generalization across transformed 3D scenes. SDP demonstrates a large performance improvement over strong baselines in 20 simulation tasks and 5 physical robot tasks including single-arm and bi-manual embodiments. Code is available at https://github.com/amazon-science/Spherical_Diffusion_Policy.
Symmetry in Neural Network Parameter Spaces
Jun 16, 2025Modern deep learning models are highly overparameterized, resulting in large sets of parameter configurations that yield the same outputs. A significant portion of this redundancy is explained by symmetries in the parameter space--transformations that leave the network function unchanged. These symmetries shape the loss landscape and constrain learning dynamics, offering a new lens for understanding optimization, generalization, and model complexity that complements existing theory of deep learning. This survey provides an overview of parameter space symmetry. We summarize existing literature, uncover connections between symmetry and learning theory, and identify gaps and opportunities in this emerging field.
Understanding Mode Connectivity via Parameter Space Symmetry
May 29, 2025Neural network minima are often connected by curves along which train and test loss remain nearly constant, a phenomenon known as mode connectivity. While this property has enabled applications such as model merging and fine-tuning, its theoretical explanation remains unclear. We propose a new approach to exploring the connectedness of minima using parameter space symmetry. By linking the topology of symmetry groups to that of the minima, we derive the number of connected components of the minima of linear networks and show that skip connections reduce this number. We then examine when mode connectivity and linear mode connectivity hold or fail, using parameter symmetries which account for a significant part of the minimum. Finally, we provide explicit expressions for connecting curves in the minima induced by symmetry. Using the curvature of these curves, we derive conditions under which linear mode connectivity approximately holds. Our findings highlight the role of continuous symmetries in understanding the neural network loss landscape.
EquAct: An SE(3)-Equivariant Multi-Task Transformer for Open-Loop Robotic Manipulation
May 27, 2025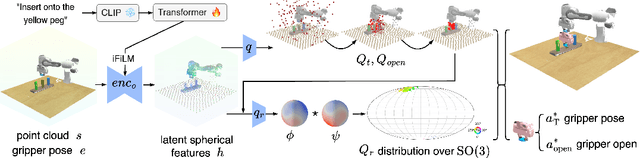
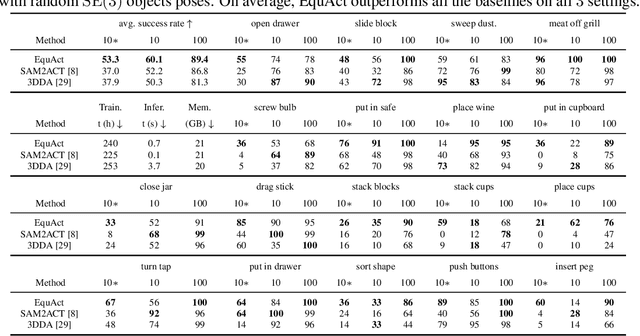
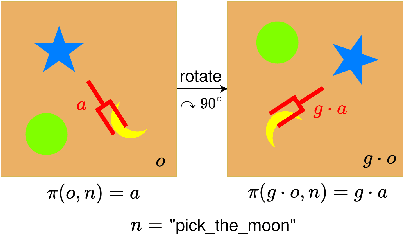
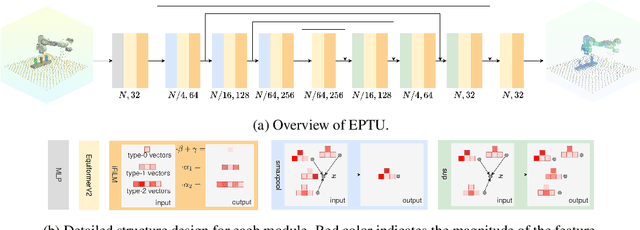
Transformer architectures can effectively learn language-conditioned, multi-task 3D open-loop manipulation policies from demonstrations by jointly processing natural language instructions and 3D observations. However, although both the robot policy and language instructions inherently encode rich 3D geometric structures, standard transformers lack built-in guarantees of geometric consistency, often resulting in unpredictable behavior under SE(3) transformations of the scene. In this paper, we leverage SE(3) equivariance as a key structural property shared by both policy and language, and propose EquAct-a novel SE(3)-equivariant multi-task transformer. EquAct is theoretically guaranteed to be SE(3) equivariant and consists of two key components: (1) an efficient SE(3)-equivariant point cloud-based U-net with spherical Fourier features for policy reasoning, and (2) SE(3)-invariant Feature-wise Linear Modulation (iFiLM) layers for language conditioning. To evaluate its spatial generalization ability, we benchmark EquAct on 18 RLBench simulation tasks with both SE(3) and SE(2) scene perturbations, and on 4 physical tasks. EquAct performs state-of-the-art across these simulation and physical tasks.