 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSE(3)-Equivariant Diffusion Policy in Spherical Fourier Space
Jul 02, 2025Diffusion Policies are effective at learning closed-loop manipulation policies from human demonstrations but generalize poorly to novel arrangements of objects in 3D space, hurting real-world performance. To address this issue, we propose Spherical Diffusion Policy (SDP), an SE(3) equivariant diffusion policy that adapts trajectories according to 3D transformations of the scene. Such equivariance is achieved by embedding the states, actions, and the denoising process in spherical Fourier space. Additionally, we employ novel spherical FiLM layers to condition the action denoising process equivariantly on the scene embeddings. Lastly, we propose a spherical denoising temporal U-net that achieves spatiotemporal equivariance with computational efficiency. In the end, SDP is end-to-end SE(3) equivariant, allowing robust generalization across transformed 3D scenes. SDP demonstrates a large performance improvement over strong baselines in 20 simulation tasks and 5 physical robot tasks including single-arm and bi-manual embodiments. Code is available at https://github.com/amazon-science/Spherical_Diffusion_Policy.
EquAct: An SE(3)-Equivariant Multi-Task Transformer for Open-Loop Robotic Manipulation
May 27, 2025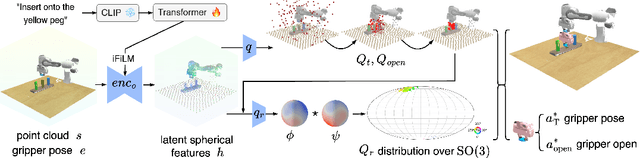
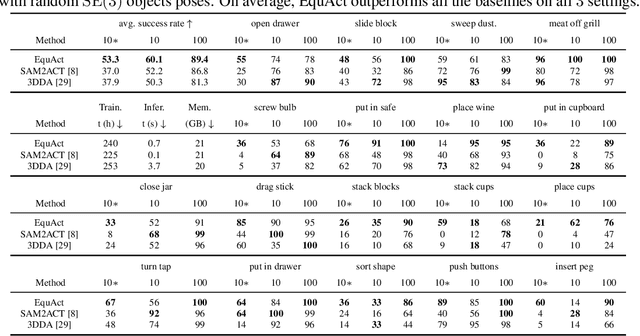
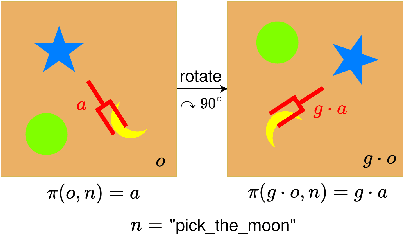
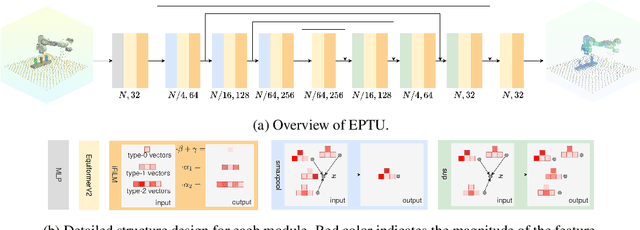
Transformer architectures can effectively learn language-conditioned, multi-task 3D open-loop manipulation policies from demonstrations by jointly processing natural language instructions and 3D observations. However, although both the robot policy and language instructions inherently encode rich 3D geometric structures, standard transformers lack built-in guarantees of geometric consistency, often resulting in unpredictable behavior under SE(3) transformations of the scene. In this paper, we leverage SE(3) equivariance as a key structural property shared by both policy and language, and propose EquAct-a novel SE(3)-equivariant multi-task transformer. EquAct is theoretically guaranteed to be SE(3) equivariant and consists of two key components: (1) an efficient SE(3)-equivariant point cloud-based U-net with spherical Fourier features for policy reasoning, and (2) SE(3)-invariant Feature-wise Linear Modulation (iFiLM) layers for language conditioning. To evaluate its spatial generalization ability, we benchmark EquAct on 18 RLBench simulation tasks with both SE(3) and SE(2) scene perturbations, and on 4 physical tasks. EquAct performs state-of-the-art across these simulation and physical tasks.
3D Equivariant Visuomotor Policy Learning via Spherical Projection
May 22, 2025Equivariant models have recently been shown to improve the data efficiency of diffusion policy by a significant margin. However, prior work that explored this direction focused primarily on point cloud inputs generated by multiple cameras fixed in the workspace. This type of point cloud input is not compatible with the now-common setting where the primary input modality is an eye-in-hand RGB camera like a GoPro. This paper closes this gap by incorporating into the diffusion policy model a process that projects features from the 2D RGB camera image onto a sphere. This enables us to reason about symmetries in SO(3) without explicitly reconstructing a point cloud. We perform extensive experiments in both simulation and the real world that demonstrate that our method consistently outperforms strong baselines in terms of both performance and sample efficiency. Our work is the first SO(3)-equivariant policy learning framework for robotic manipulation that works using only monocular RGB inputs.
Hierarchical Equivariant Policy via Frame Transf
Feb 09, 2025Recent advances in hierarchical policy learning highlight the advantages of decomposing systems into high-level and low-level agents, enabling efficient long-horizon reasoning and precise fine-grained control. However, the interface between these hierarchy levels remains underexplored, and existing hierarchical methods often ignore domain symmetry, resulting in the need for extensive demonstrations to achieve robust performance. To address these issues, we propose Hierarchical Equivariant Policy (HEP), a novel hierarchical policy framework. We propose a frame transfer interface for hierarchical policy learning, which uses the high-level agent's output as a coordinate frame for the low-level agent, providing a strong inductive bias while retaining flexibility. Additionally, we integrate domain symmetries into both levels and theoretically demonstrate the system's overall equivariance. HEP achieves state-of-the-art performance in complex robotic manipulation tasks, demonstrating significant improvements in both simulation and real-world settings.
Coarse-to-Fine 3D Keyframe Transporter
Feb 03, 2025

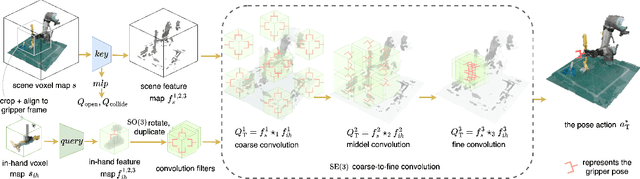
Recent advances in Keyframe Imitation Learning (IL) have enabled learning-based agents to solve a diverse range of manipulation tasks. However, most approaches ignore the rich symmetries in the problem setting and, as a consequence, are sample-inefficient. This work identifies and utilizes the bi-equivariant symmetry within Keyframe IL to design a policy that generalizes to transformations of both the workspace and the objects grasped by the gripper. We make two main contributions: First, we analyze the bi-equivariance properties of the keyframe action scheme and propose a Keyframe Transporter derived from the Transporter Networks, which evaluates actions using cross-correlation between the features of the grasped object and the features of the scene. Second, we propose a computationally efficient coarse-to-fine SE(3) action evaluation scheme for reasoning the intertwined translation and rotation action. The resulting method outperforms strong Keyframe IL baselines by an average of >10% on a wide range of simulation tasks, and by an average of 55% in 4 physical experiments.
Equivariant Action Sampling for Reinforcement Learning and Planning
Dec 16, 2024Reinforcement learning (RL) algorithms for continuous control tasks require accurate sampling-based action selection. Many tasks, such as robotic manipulation, contain inherent problem symmetries. However, correctly incorporating symmetry into sampling-based approaches remains a challenge. This work addresses the challenge of preserving symmetry in sampling-based planning and control, a key component for enhancing decision-making efficiency in RL. We introduce an action sampling approach that enforces the desired symmetry. We apply our proposed method to a coordinate regression problem and show that the symmetry aware sampling method drastically outperforms the naive sampling approach. We furthermore develop a general framework for sampling-based model-based planning with Model Predictive Path Integral (MPPI). We compare our MPPI approach with standard sampling methods on several continuous control tasks. Empirical demonstrations across multiple continuous control environments validate the effectiveness of our approach, showcasing the importance of symmetry preservation in sampling-based action selection.
ThinkGrasp: A Vision-Language System for Strategic Part Grasping in Clutter
Jul 16, 2024



Robotic grasping in cluttered environments remains a significant challenge due to occlusions and complex object arrangements. We have developed ThinkGrasp, a plug-and-play vision-language grasping system that makes use of GPT-4o's advanced contextual reasoning for heavy clutter environment grasping strategies. ThinkGrasp can effectively identify and generate grasp poses for target objects, even when they are heavily obstructed or nearly invisible, by using goal-oriented language to guide the removal of obstructing objects. This approach progressively uncovers the target object and ultimately grasps it with a few steps and a high success rate. In both simulated and real experiments, ThinkGrasp achieved a high success rate and significantly outperformed state-of-the-art methods in heavily cluttered environments or with diverse unseen objects, demonstrating strong generalization capabilities.
OrbitGrasp: $SE(3)$-Equivariant Grasp Learning
Jul 03, 2024While grasp detection is an important part of any robotic manipulation pipeline, reliable and accurate grasp detection in $SE(3)$ remains a research challenge. Many robotics applications in unstructured environments such as the home or warehouse would benefit a lot from better grasp performance. This paper proposes a novel framework for detecting $SE(3)$ grasp poses based on point cloud input. Our main contribution is to propose an $SE(3)$-equivariant model that maps each point in the cloud to a continuous grasp quality function over the 2-sphere $S^2$ using a spherical harmonic basis. Compared with reasoning about a finite set of samples, this formulation improves the accuracy and efficiency of our model when a large number of samples would otherwise be needed. In order to accomplish this, we propose a novel variation on EquiFormerV2 that leverages a UNet-style backbone to enlarge the number of points the model can handle. Our resulting method, which we name $\textit{OrbitGrasp}$, significantly outperforms baselines in both simulation and physical experiments.
Fourier Transporter: Bi-Equivariant Robotic Manipulation in 3D
Jan 22, 2024Many complex robotic manipulation tasks can be decomposed as a sequence of pick and place actions. Training a robotic agent to learn this sequence over many different starting conditions typically requires many iterations or demonstrations, especially in 3D environments. In this work, we propose Fourier Transporter (\ours{}) which leverages the two-fold $\SE(d)\times\SE(d)$ symmetry in the pick-place problem to achieve much higher sample efficiency. \ours{} is an open-loop behavior cloning method trained using expert demonstrations to predict pick-place actions on new environments. \ours{} is constrained to incorporate symmetries of the pick and place actions independently. Our method utilizes a fiber space Fourier transformation that allows for memory-efficient construction. We test our proposed network on the RLbench benchmark and achieve state-of-the-art results across various tasks.
Can Euclidean Symmetry be Leveraged in Reinforcement Learning and Planning?
Jul 17, 2023In robotic tasks, changes in reference frames typically do not influence the underlying physical properties of the system, which has been known as invariance of physical laws.These changes, which preserve distance, encompass isometric transformations such as translations, rotations, and reflections, collectively known as the Euclidean group. In this work, we delve into the design of improved learning algorithms for reinforcement learning and planning tasks that possess Euclidean group symmetry. We put forth a theory on that unify prior work on discrete and continuous symmetry in reinforcement learning, planning, and optimal control. Algorithm side, we further extend the 2D path planning with value-based planning to continuous MDPs and propose a pipeline for constructing equivariant sampling-based planning algorithms. Our work is substantiated with empirical evidence and illustrated through examples that explain the benefits of equivariance to Euclidean symmetry in tackling natural control problems.