 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEquivariant Action Sampling for Reinforcement Learning and Planning
Dec 16, 2024Reinforcement learning (RL) algorithms for continuous control tasks require accurate sampling-based action selection. Many tasks, such as robotic manipulation, contain inherent problem symmetries. However, correctly incorporating symmetry into sampling-based approaches remains a challenge. This work addresses the challenge of preserving symmetry in sampling-based planning and control, a key component for enhancing decision-making efficiency in RL. We introduce an action sampling approach that enforces the desired symmetry. We apply our proposed method to a coordinate regression problem and show that the symmetry aware sampling method drastically outperforms the naive sampling approach. We furthermore develop a general framework for sampling-based model-based planning with Model Predictive Path Integral (MPPI). We compare our MPPI approach with standard sampling methods on several continuous control tasks. Empirical demonstrations across multiple continuous control environments validate the effectiveness of our approach, showcasing the importance of symmetry preservation in sampling-based action selection.
Open-vocabulary Pick and Place via Patch-level Semantic Maps
Jun 21, 2024Controlling robots through natural language instructions in open-vocabulary scenarios is pivotal for enhancing human-robot collaboration and complex robot behavior synthesis. However, achieving this capability poses significant challenges due to the need for a system that can generalize from limited data to a wide range of tasks and environments. Existing methods rely on large, costly datasets and struggle with generalization. This paper introduces Grounded Equivariant Manipulation (GEM), a novel approach that leverages the generative capabilities of pre-trained vision-language models and geometric symmetries to facilitate few-shot and zero-shot learning for open-vocabulary robot manipulation tasks. Our experiments demonstrate GEM's high sample efficiency and superior generalization across diverse pick-and-place tasks in both simulation and real-world experiments, showcasing its ability to adapt to novel instructions and unseen objects with minimal data requirements. GEM advances a significant step forward in the domain of language-conditioned robot control, bridging the gap between semantic understanding and action generation in robotic systems.
Tracking Small and Fast Moving Objects: A Benchmark
Sep 09, 2022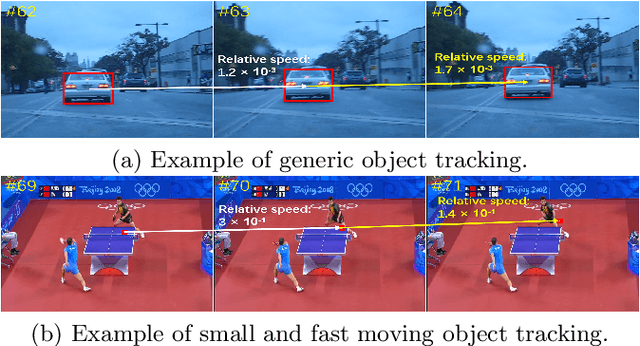
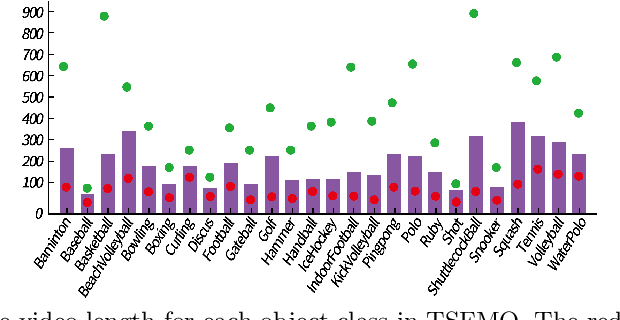


With more and more large-scale datasets available for training, visual tracking has made great progress in recent years. However, current research in the field mainly focuses on tracking generic objects. In this paper, we present TSFMO, a benchmark for \textbf{T}racking \textbf{S}mall and \textbf{F}ast \textbf{M}oving \textbf{O}bjects. This benchmark aims to encourage research in developing novel and accurate methods for this challenging task particularly. TSFMO consists of 250 sequences with about 50k frames in total. Each frame in these sequences is carefully and manually annotated with a bounding box. To the best of our knowledge, TSFMO is the first benchmark dedicated to tracking small and fast moving objects, especially connected to sports. To understand how existing methods perform and to provide comparison for future research on TSFMO, we extensively evaluate 20 state-of-the-art trackers on the benchmark. The evaluation results exhibit that more effort are required to improve tracking small and fast moving objects. Moreover, to encourage future research, we proposed a novel tracker S-KeepTrack which surpasses all 20 evaluated approaches. By releasing TSFMO, we expect to facilitate future researches and applications of tracking small and fast moving objects. The TSFMO and evaluation results as well as S-KeepTrack are available at \url{https://github.com/CodeOfGithub/S-KeepTrack}.