 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResidual Rotation Correction using Tactile Equivariance
Nov 11, 2025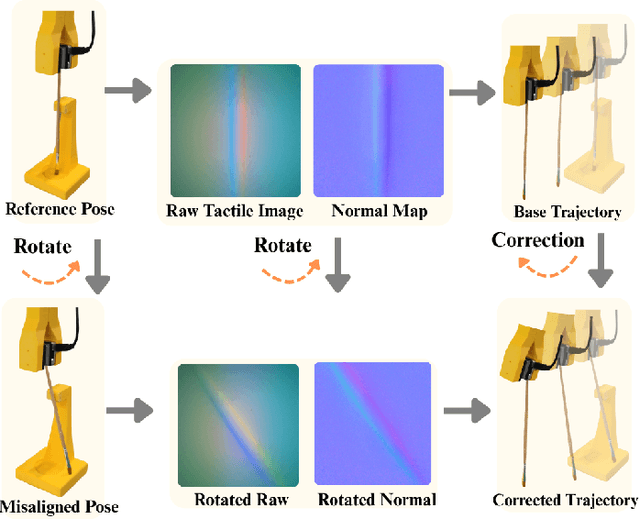
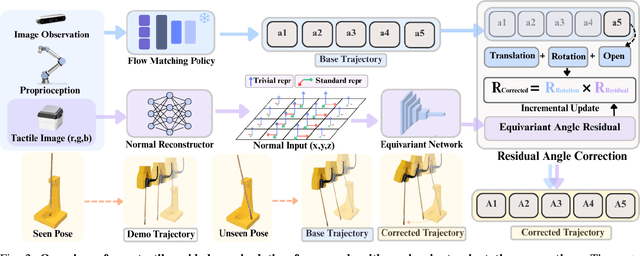
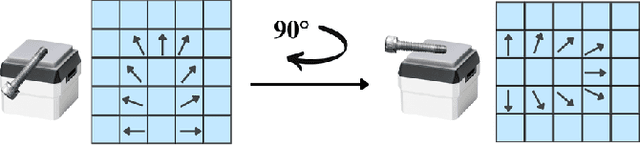
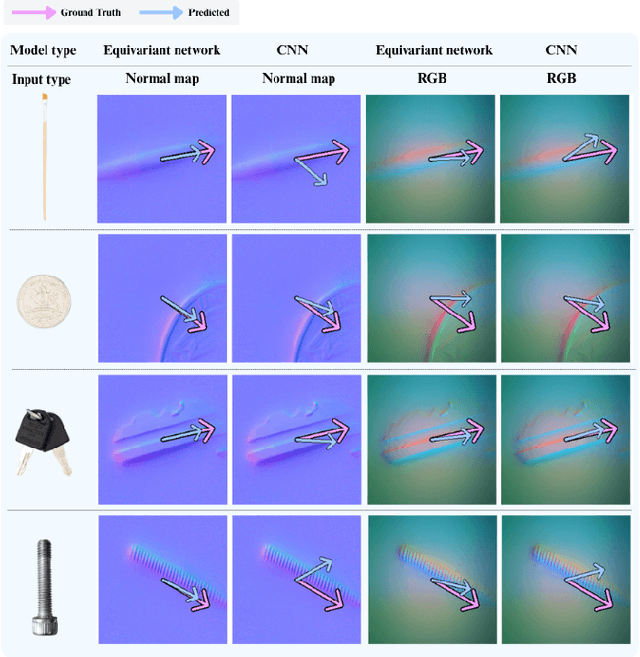
Visuotactile policy learning augments vision-only policies with tactile input, facilitating contact-rich manipulation. However, the high cost of tactile data collection makes sample efficiency the key requirement for developing visuotactile policies. We present EquiTac, a framework that exploits the inherent SO(2) symmetry of in-hand object rotation to improve sample efficiency and generalization for visuotactile policy learning. EquiTac first reconstructs surface normals from raw RGB inputs of vision-based tactile sensors, so rotations of the normal vector field correspond to in-hand object rotations. An SO(2)-equivariant network then predicts a residual rotation action that augments a base visuomotor policy at test time, enabling real-time rotation correction without additional reorientation demonstrations. On a real robot, EquiTac accurately achieves robust zero-shot generalization to unseen in-hand orientations with very few training samples, where baselines fail even with more training data. To our knowledge, this is the first tactile learning method to explicitly encode tactile equivariance for policy learning, yielding a lightweight, symmetry-aware module that improves reliability in contact-rich tasks.
3D Equivariant Visuomotor Policy Learning via Spherical Projection
May 22, 2025Equivariant models have recently been shown to improve the data efficiency of diffusion policy by a significant margin. However, prior work that explored this direction focused primarily on point cloud inputs generated by multiple cameras fixed in the workspace. This type of point cloud input is not compatible with the now-common setting where the primary input modality is an eye-in-hand RGB camera like a GoPro. This paper closes this gap by incorporating into the diffusion policy model a process that projects features from the 2D RGB camera image onto a sphere. This enables us to reason about symmetries in SO(3) without explicitly reconstructing a point cloud. We perform extensive experiments in both simulation and the real world that demonstrate that our method consistently outperforms strong baselines in terms of both performance and sample efficiency. Our work is the first SO(3)-equivariant policy learning framework for robotic manipulation that works using only monocular RGB inputs.
A Practical Guide for Incorporating Symmetry in Diffusion Policy
May 19, 2025Recently, equivariant neural networks for policy learning have shown promising improvements in sample efficiency and generalization, however, their wide adoption faces substantial barriers due to implementation complexity. Equivariant architectures typically require specialized mathematical formulations and custom network design, posing significant challenges when integrating with modern policy frameworks like diffusion-based models. In this paper, we explore a number of straightforward and practical approaches to incorporate symmetry benefits into diffusion policies without the overhead of full equivariant designs. Specifically, we investigate (i) invariant representations via relative trajectory actions and eye-in-hand perception, (ii) integrating equivariant vision encoders, and (iii) symmetric feature extraction with pretrained encoders using Frame Averaging. We first prove that combining eye-in-hand perception with relative or delta action parameterization yields inherent SE(3)-invariance, thus improving policy generalization. We then perform a systematic experimental study on those design choices for integrating symmetry in diffusion policies, and conclude that an invariant representation with equivariant feature extraction significantly improves the policy performance. Our method achieves performance on par with or exceeding fully equivariant architectures while greatly simplifying implementation.
Coarse-to-Fine 3D Keyframe Transporter
Feb 03, 2025

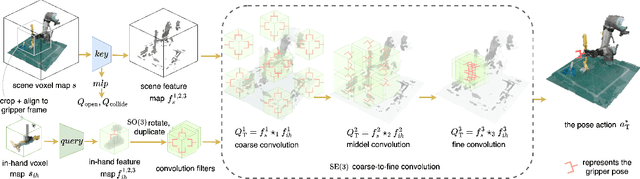
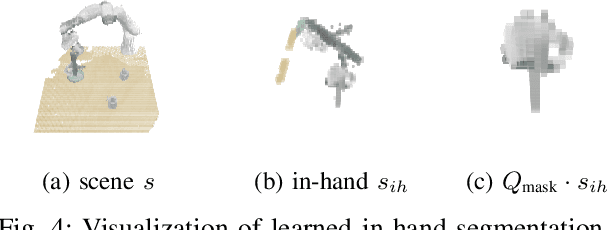
Recent advances in Keyframe Imitation Learning (IL) have enabled learning-based agents to solve a diverse range of manipulation tasks. However, most approaches ignore the rich symmetries in the problem setting and, as a consequence, are sample-inefficient. This work identifies and utilizes the bi-equivariant symmetry within Keyframe IL to design a policy that generalizes to transformations of both the workspace and the objects grasped by the gripper. We make two main contributions: First, we analyze the bi-equivariance properties of the keyframe action scheme and propose a Keyframe Transporter derived from the Transporter Networks, which evaluates actions using cross-correlation between the features of the grasped object and the features of the scene. Second, we propose a computationally efficient coarse-to-fine SE(3) action evaluation scheme for reasoning the intertwined translation and rotation action. The resulting method outperforms strong Keyframe IL baselines by an average of >10% on a wide range of simulation tasks, and by an average of 55% in 4 physical experiments.
OrbitGrasp: $SE(3)$-Equivariant Grasp Learning
Jul 03, 2024



While grasp detection is an important part of any robotic manipulation pipeline, reliable and accurate grasp detection in $SE(3)$ remains a research challenge. Many robotics applications in unstructured environments such as the home or warehouse would benefit a lot from better grasp performance. This paper proposes a novel framework for detecting $SE(3)$ grasp poses based on point cloud input. Our main contribution is to propose an $SE(3)$-equivariant model that maps each point in the cloud to a continuous grasp quality function over the 2-sphere $S^2$ using a spherical harmonic basis. Compared with reasoning about a finite set of samples, this formulation improves the accuracy and efficiency of our model when a large number of samples would otherwise be needed. In order to accomplish this, we propose a novel variation on EquiFormerV2 that leverages a UNet-style backbone to enlarge the number of points the model can handle. Our resulting method, which we name $\textit{OrbitGrasp}$, significantly outperforms baselines in both simulation and physical experiments.
ACRNet: Attention Cube Regression Network for Multi-view Real-time 3D Human Pose Estimation in Telemedicine
Oct 11, 2022



Human pose estimation (HPE) for 3D skeleton reconstruction in telemedicine has long received attention. Although the development of deep learning has made HPE methods in telemedicine simpler and easier to use, addressing low accuracy and high latency remains a big challenge. In this paper, we propose a novel multi-view Attention Cube Regression Network (ACRNet), which regresses the 3D position of joints in real time by aggregating informative attention points on each cube surface. More specially, a cube whose each surface contains uniformly distributed attention points with specific coordinate values is first created to wrap the target from the main view. Then, our network regresses the 3D position of each joint by summing and averaging the coordinates of attention points on each surface after being weighted. To verify our method, we first tested ACRNet on the open-source ITOP dataset; meanwhile, we collected a new multi-view upper body movement dataset (UBM) on the trunk support trainer (TruST) to validate the capability of our model in real rehabilitation scenarios. Experimental results demonstrate the superiority of ACRNet compared with other state-of-the-art methods. We also validate the efficacy of each module in ACRNet. Furthermore, Our work analyzes the performance of ACRNet under the medical monitoring indicator. Because of the high accuracy and running speed, our model is suitable for real-time telemedicine settings. The source code is available at https://github.com/BoceHu/ACRNet