 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePangu DeepDiver: Adaptive Search Intensity Scaling via Open-Web Reinforcement Learning
May 30, 2025Information seeking demands iterative evidence gathering and reflective reasoning, yet large language models (LLMs) still struggle with it in open-web question answering. Existing methods rely on static prompting rules or training with Wikipedia-based corpora and retrieval environments, limiting adaptability to the real-world web environment where ambiguity, conflicting evidence, and noise are prevalent. These constrained training settings hinder LLMs from learning to dynamically decide when and where to search, and how to adjust search depth and frequency based on informational demands. We define this missing capacity as Search Intensity Scaling (SIS)--the emergent skill to intensify search efforts under ambiguous or conflicting conditions, rather than settling on overconfident, under-verification answers. To study SIS, we introduce WebPuzzle, the first dataset designed to foster information-seeking behavior in open-world internet environments. WebPuzzle consists of 24K training instances and 275 test questions spanning both wiki-based and open-web queries. Building on this dataset, we propose DeepDiver, a Reinforcement Learning (RL) framework that promotes SIS by encouraging adaptive search policies through exploration under a real-world open-web environment. Experimental results show that Pangu-7B-Reasoner empowered by DeepDiver achieve performance on real-web tasks comparable to the 671B-parameter DeepSeek-R1. We detail DeepDiver's training curriculum from cold-start supervised fine-tuning to a carefully designed RL phase, and present that its capability of SIS generalizes from closed-form QA to open-ended tasks such as long-form writing. Our contributions advance adaptive information seeking in LLMs and provide a valuable benchmark and dataset for future research.
Pangu Light: Weight Re-Initialization for Pruning and Accelerating LLMs
May 26, 2025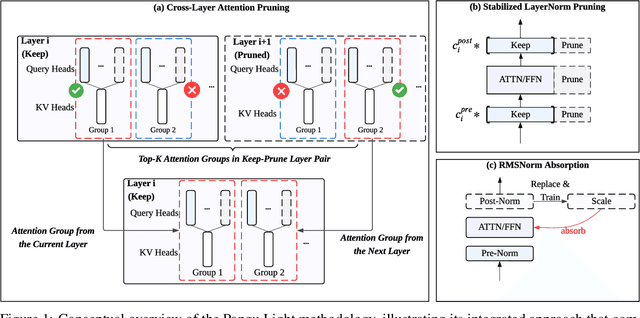

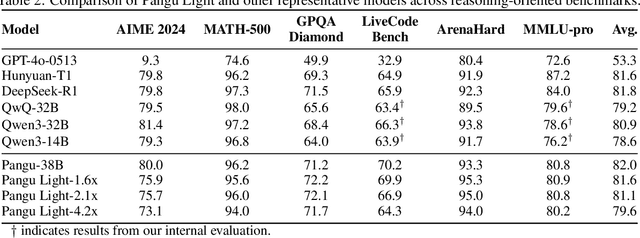
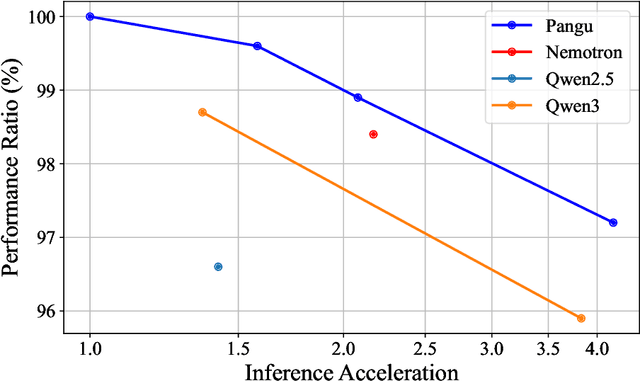
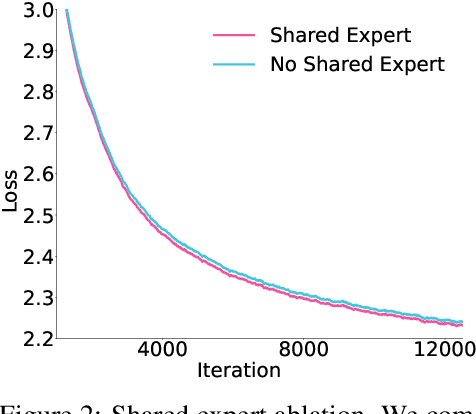
Large Language Models (LLMs) deliver state-of-the-art capabilities across numerous tasks, but their immense size and inference costs pose significant computational challenges for practical deployment. While structured pruning offers a promising avenue for model compression, existing methods often struggle with the detrimental effects of aggressive, simultaneous width and depth reductions, leading to substantial performance degradation. This paper argues that a critical, often overlooked, aspect in making such aggressive joint pruning viable is the strategic re-initialization and adjustment of remaining weights to improve the model post-pruning training accuracies. We introduce Pangu Light, a framework for LLM acceleration centered around structured pruning coupled with novel weight re-initialization techniques designed to address this ``missing piece''. Our framework systematically targets multiple axes, including model width, depth, attention heads, and RMSNorm, with its effectiveness rooted in novel re-initialization methods like Cross-Layer Attention Pruning (CLAP) and Stabilized LayerNorm Pruning (SLNP) that mitigate performance drops by providing the network a better training starting point. Further enhancing efficiency, Pangu Light incorporates specialized optimizations such as absorbing Post-RMSNorm computations and tailors its strategies to Ascend NPU characteristics. The Pangu Light models consistently exhibit a superior accuracy-efficiency trade-off, outperforming prominent baseline pruning methods like Nemotron and established LLMs like Qwen3 series. For instance, on Ascend NPUs, Pangu Light-32B's 81.6 average score and 2585 tokens/s throughput exceed Qwen3-32B's 80.9 average score and 2225 tokens/s.
Pangu Ultra MoE: How to Train Your Big MoE on Ascend NPUs
May 07, 2025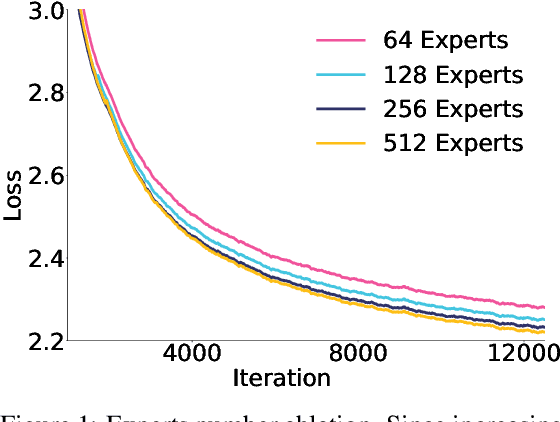


Sparse large language models (LLMs) with Mixture of Experts (MoE) and close to a trillion parameters are dominating the realm of most capable language models. However, the massive model scale poses significant challenges for the underlying software and hardware systems. In this paper, we aim to uncover a recipe to harness such scale on Ascend NPUs. The key goals are better usage of the computing resources under the dynamic sparse model structures and materializing the expected performance gain on the actual hardware. To select model configurations suitable for Ascend NPUs without repeatedly running the expensive experiments, we leverage simulation to compare the trade-off of various model hyperparameters. This study led to Pangu Ultra MoE, a sparse LLM with 718 billion parameters, and we conducted experiments on the model to verify the simulation results. On the system side, we dig into Expert Parallelism to optimize the communication between NPU devices to reduce the synchronization overhead. We also optimize the memory efficiency within the devices to further reduce the parameter and activation management overhead. In the end, we achieve an MFU of 30.0% when training Pangu Ultra MoE, with performance comparable to that of DeepSeek R1, on 6K Ascend NPUs, and demonstrate that the Ascend system is capable of harnessing all the training stages of the state-of-the-art language models. Extensive experiments indicate that our recipe can lead to efficient training of large-scale sparse language models with MoE. We also study the behaviors of such models for future reference.
Pangu Ultra: Pushing the Limits of Dense Large Language Models on Ascend NPUs
Apr 10, 2025



We present Pangu Ultra, a Large Language Model (LLM) with 135 billion parameters and dense Transformer modules trained on Ascend Neural Processing Units (NPUs). Although the field of LLM has been witnessing unprecedented advances in pushing the scale and capability of LLM in recent years, training such a large-scale model still involves significant optimization and system challenges. To stabilize the training process, we propose depth-scaled sandwich normalization, which effectively eliminates loss spikes during the training process of deep models. We pre-train our model on 13.2 trillion diverse and high-quality tokens and further enhance its reasoning capabilities during post-training. To perform such large-scale training efficiently, we utilize 8,192 Ascend NPUs with a series of system optimizations. Evaluations on multiple diverse benchmarks indicate that Pangu Ultra significantly advances the state-of-the-art capabilities of dense LLMs such as Llama 405B and Mistral Large 2, and even achieves competitive results with DeepSeek-R1, whose sparse model structure contains much more parameters. Our exploration demonstrates that Ascend NPUs are capable of efficiently and effectively training dense models with more than 100 billion parameters. Our model and system will be available for our commercial customers.
Multi-modal NeRF Self-Supervision for LiDAR Semantic Segmentation
Nov 05, 2024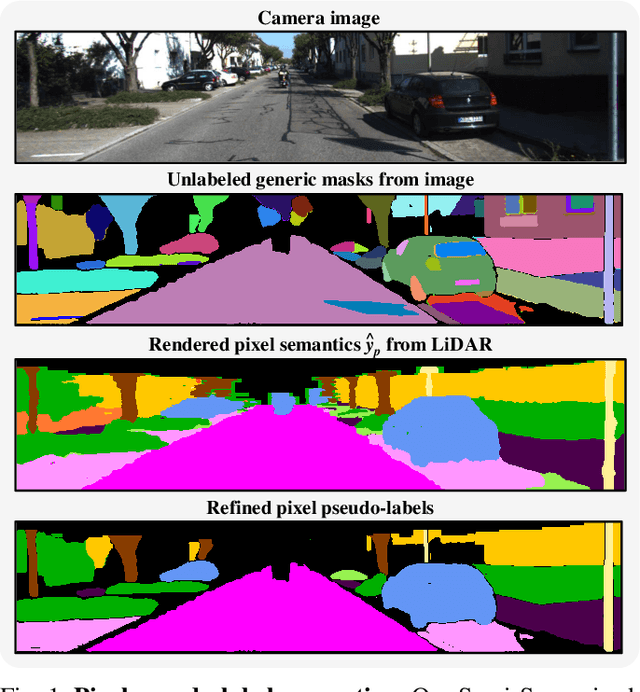
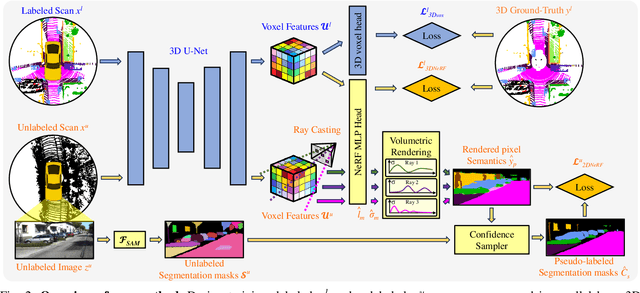
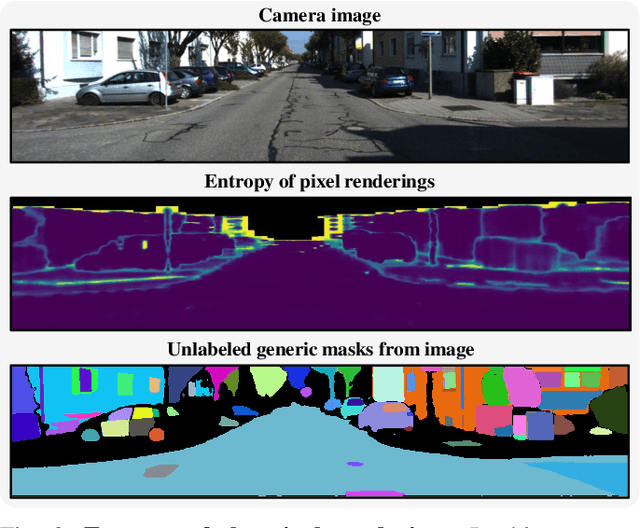
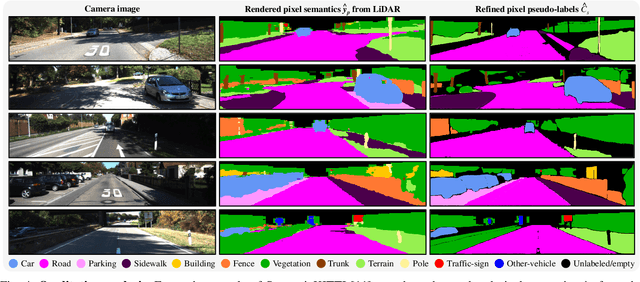
LiDAR Semantic Segmentation is a fundamental task in autonomous driving perception consisting of associating each LiDAR point to a semantic label. Fully-supervised models have widely tackled this task, but they require labels for each scan, which either limits their domain or requires impractical amounts of expensive annotations. Camera images, which are generally recorded alongside LiDAR pointclouds, can be processed by the widely available 2D foundation models, which are generic and dataset-agnostic. However, distilling knowledge from 2D data to improve LiDAR perception raises domain adaptation challenges. For example, the classical perspective projection suffers from the parallax effect produced by the position shift between both sensors at their respective capture times. We propose a Semi-Supervised Learning setup to leverage unlabeled LiDAR pointclouds alongside distilled knowledge from the camera images. To self-supervise our model on the unlabeled scans, we add an auxiliary NeRF head and cast rays from the camera viewpoint over the unlabeled voxel features. The NeRF head predicts densities and semantic logits at each sampled ray location which are used for rendering pixel semantics. Concurrently, we query the Segment-Anything (SAM) foundation model with the camera image to generate a set of unlabeled generic masks. We fuse the masks with the rendered pixel semantics from LiDAR to produce pseudo-labels that supervise the pixel predictions. During inference, we drop the NeRF head and run our model with only LiDAR. We show the effectiveness of our approach in three public LiDAR Semantic Segmentation benchmarks: nuScenes, SemanticKITTI and ScribbleKITTI.
Walker: Self-supervised Multiple Object Tracking by Walking on Temporal Appearance Graphs
Sep 25, 2024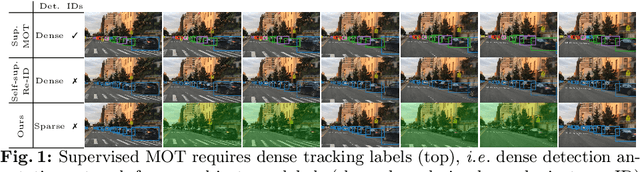
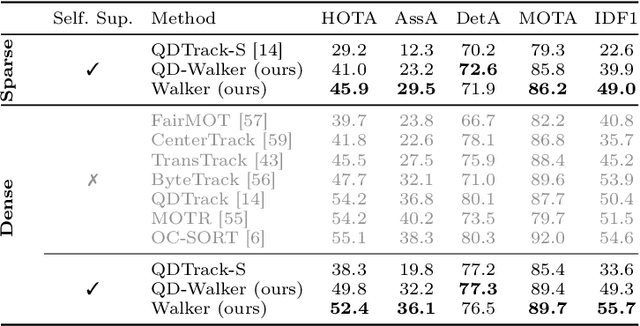
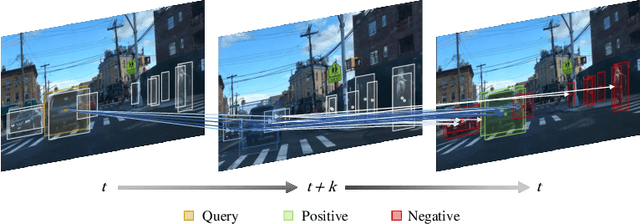
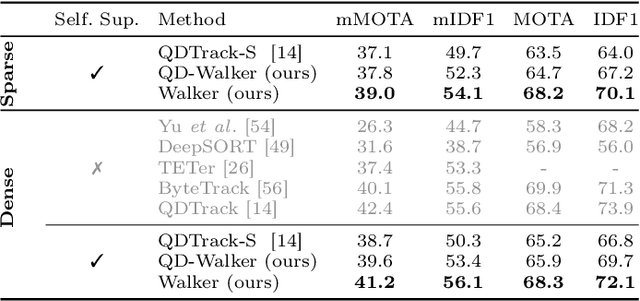
The supervision of state-of-the-art multiple object tracking (MOT) methods requires enormous annotation efforts to provide bounding boxes for all frames of all videos, and instance IDs to associate them through time. To this end, we introduce Walker, the first self-supervised tracker that learns from videos with sparse bounding box annotations, and no tracking labels. First, we design a quasi-dense temporal object appearance graph, and propose a novel multi-positive contrastive objective to optimize random walks on the graph and learn instance similarities. Then, we introduce an algorithm to enforce mutually-exclusive connective properties across instances in the graph, optimizing the learned topology for MOT. At inference time, we propose to associate detected instances to tracklets based on the max-likelihood transition state under motion-constrained bi-directional walks. Walker is the first self-supervised tracker to achieve competitive performance on MOT17, DanceTrack, and BDD100K. Remarkably, our proposal outperforms the previous self-supervised trackers even when drastically reducing the annotation requirements by up to 400x.
HiT-SR: Hierarchical Transformer for Efficient Image Super-Resolution
Jul 08, 2024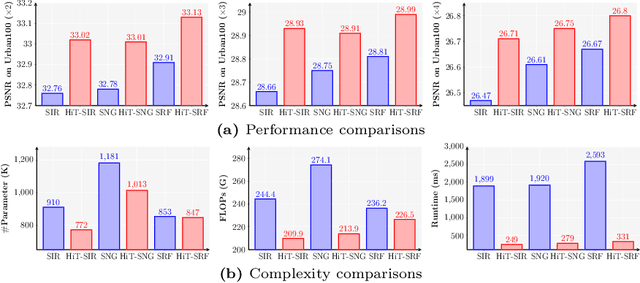


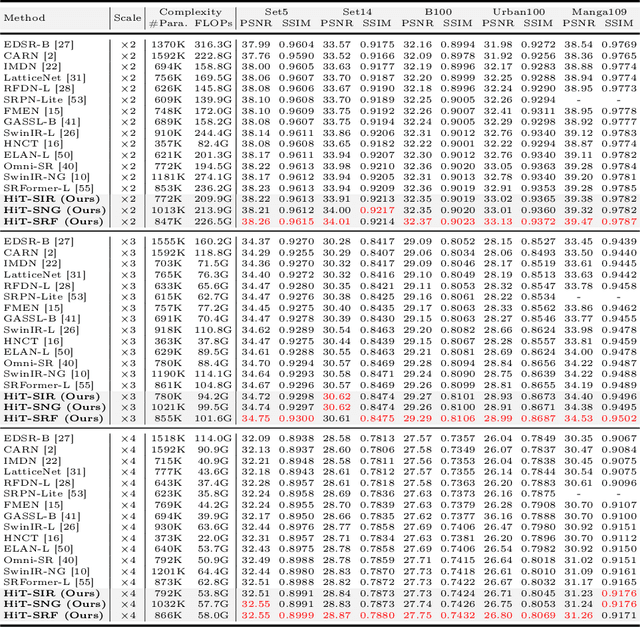
Transformers have exhibited promising performance in computer vision tasks including image super-resolution (SR). However, popular transformer-based SR methods often employ window self-attention with quadratic computational complexity to window sizes, resulting in fixed small windows with limited receptive fields. In this paper, we present a general strategy to convert transformer-based SR networks to hierarchical transformers (HiT-SR), boosting SR performance with multi-scale features while maintaining an efficient design. Specifically, we first replace the commonly used fixed small windows with expanding hierarchical windows to aggregate features at different scales and establish long-range dependencies. Considering the intensive computation required for large windows, we further design a spatial-channel correlation method with linear complexity to window sizes, efficiently gathering spatial and channel information from hierarchical windows. Extensive experiments verify the effectiveness and efficiency of our HiT-SR, and our improved versions of SwinIR-Light, SwinIR-NG, and SRFormer-Light yield state-of-the-art SR results with fewer parameters, FLOPs, and faster speeds ($\sim7\times$).
Matching Anything by Segmenting Anything
Jun 06, 2024



The robust association of the same objects across video frames in complex scenes is crucial for many applications, especially Multiple Object Tracking (MOT). Current methods predominantly rely on labeled domain-specific video datasets, which limits the cross-domain generalization of learned similarity embeddings. We propose MASA, a novel method for robust instance association learning, capable of matching any objects within videos across diverse domains without tracking labels. Leveraging the rich object segmentation from the Segment Anything Model (SAM), MASA learns instance-level correspondence through exhaustive data transformations. We treat the SAM outputs as dense object region proposals and learn to match those regions from a vast image collection. We further design a universal MASA adapter which can work in tandem with foundational segmentation or detection models and enable them to track any detected objects. Those combinations present strong zero-shot tracking ability in complex domains. Extensive tests on multiple challenging MOT and MOTS benchmarks indicate that the proposed method, using only unlabeled static images, achieves even better performance than state-of-the-art methods trained with fully annotated in-domain video sequences, in zero-shot association. Project Page: https://matchinganything.github.io/
UniDepth: Universal Monocular Metric Depth Estimation
Mar 27, 2024



Accurate monocular metric depth estimation (MMDE) is crucial to solving downstream tasks in 3D perception and modeling. However, the remarkable accuracy of recent MMDE methods is confined to their training domains. These methods fail to generalize to unseen domains even in the presence of moderate domain gaps, which hinders their practical applicability. We propose a new model, UniDepth, capable of reconstructing metric 3D scenes from solely single images across domains. Departing from the existing MMDE methods, UniDepth directly predicts metric 3D points from the input image at inference time without any additional information, striving for a universal and flexible MMDE solution. In particular, UniDepth implements a self-promptable camera module predicting dense camera representation to condition depth features. Our model exploits a pseudo-spherical output representation, which disentangles camera and depth representations. In addition, we propose a geometric invariance loss that promotes the invariance of camera-prompted depth features. Thorough evaluations on ten datasets in a zero-shot regime consistently demonstrate the superior performance of UniDepth, even when compared with methods directly trained on the testing domains. Code and models are available at: https://github.com/lpiccinelli-eth/unidepth
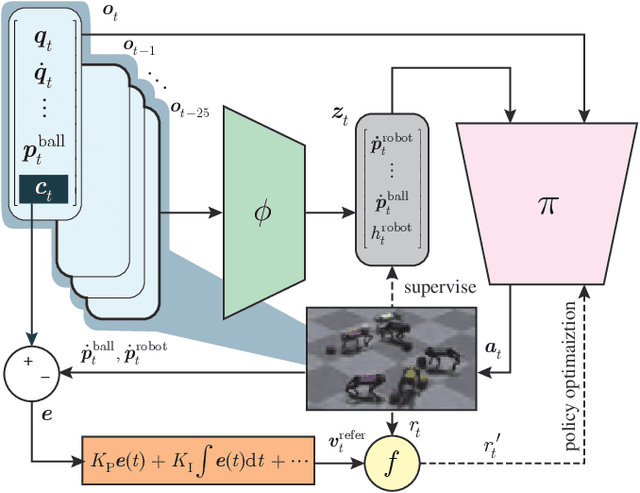
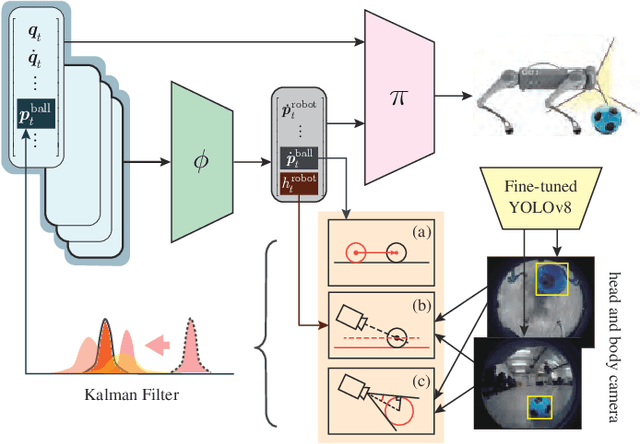
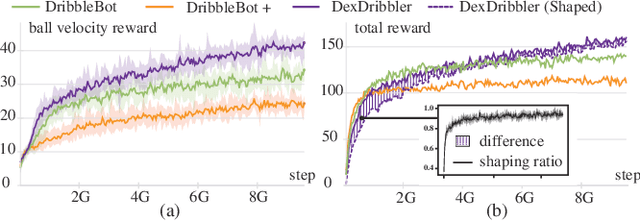
DexDribbler: Learning Dexterous Soccer Manipulation via Dynamic Supervision
Mar 21, 2024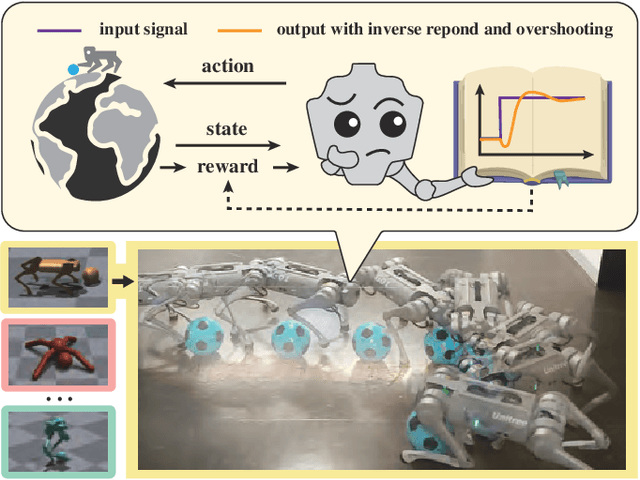
Learning dexterous locomotion policy for legged robots is becoming increasingly popular due to its ability to handle diverse terrains and resemble intelligent behaviors. However, joint manipulation of moving objects and locomotion with legs, such as playing soccer, receive scant attention in the learning community, although it is natural for humans and smart animals. A key challenge to solve this multitask problem is to infer the objectives of locomotion from the states and targets of the manipulated objects. The implicit relation between the object states and robot locomotion can be hard to capture directly from the training experience. We propose adding a feedback control block to compute the necessary body-level movement accurately and using the outputs as dynamic joint-level locomotion supervision explicitly. We further utilize an improved ball dynamic model, an extended context-aided estimator, and a comprehensive ball observer to facilitate transferring policy learned in simulation to the real world. We observe that our learning scheme can not only make the policy network converge faster but also enable soccer robots to perform sophisticated maneuvers like sharp cuts and turns on flat surfaces, a capability that was lacking in previous methods. Video and code are available at https://github.com/SysCV/soccer-player