 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShapE-GRPO: Shapley-Enhanced Reward Allocation for Multi-Candidate LLM Training
Mar 31, 2026In user-agent interaction scenarios such as recommendation, brainstorming, and code suggestion, Large Language Models (LLMs) often generate sets of candidate recommendations where the objective is to maximize the collective utility of the entire set rather than individual candidates independently. However, existing reinforcement learning post-training paradigms, such as Group Relative Policy Optimization (GRPO), typically assign the same set-level scalar reward to every candidate in the set. This leads to noisy training signals where poor candidates free-ride on the high reward produced by a single strong peer, resulting in suboptimal exploration. To address this, we propose Shapley-Enhanced GRPO (ShapE-GRPO). By leveraging the permutation-invariant nature of set-level utility, we derive a Shapley-enhanced formulation from cooperative game theory to decompose set-level rewards into granular, candidate-specific signals. We show that our formulation preserves the fundamental axioms of the Shapley value while remaining computationally efficient with polynomial-time complexity. Empirically, ShapE-GRPO consistently outperforms standard GRPO across diverse datasets with accelerated convergence during training.
JAL-Turn: Joint Acoustic-Linguistic Modeling for Real-Time and Robust Turn-Taking Detection in Full-Duplex Spoken Dialogue Systems
Mar 27, 2026Despite recent advances, efficient and robust turn-taking detection remains a significant challenge in industrial-grade Voice AI agent deployments. Many existing systems rely solely on acoustic or semantic cues, leading to suboptimal accuracy and stability, while recent attempts to endow large language models with full-duplex capabilities require costly full-duplex data and incur substantial training and deployment overheads, limiting real-time performance. In this paper, we propose JAL-Turn, a lightweight and efficient speech-only turn-taking framework that adopts a joint acoustic-linguistic modeling paradigm, in which a cross-attention module adaptively integrates pre-trained acoustic representations with linguistic features to support low-latency prediction of hold vs shift states. By sharing a frozen ASR encoder, JAL-Turn enables turn-taking prediction to run fully in parallel with speech recognition, introducing no additional end-to-end latency or computational overhead. In addition, we introduce a scalable data construction pipeline that automatically derives reliable turn-taking labels from large-scale real-world dialogue corpora. Extensive experiments on public multilingual benchmarks and an in-house Japanese customer-service dataset show that JAL-Turn consistently outperforms strong state-of-the-art baselines in detection accuracy while maintaining superior real-time performance.
SFCoT: Safer Chain-of-Thought via Active Safety Evaluation and Calibration
Mar 16, 2026Large language models (LLMs) have demonstrated remarkable capabilities in complex reasoning tasks. However, they remain highly susceptible to jailbreak attacks that undermine their safety alignment. Existing defense mechanisms typically rely on post hoc filtering applied only to the final output, leaving intermediate reasoning steps unmonitored and vulnerable to adversarial manipulation. To address this gap, this paper proposes a SaFer Chain-of-Thought (SFCoT) framework, which proactively evaluates and calibrates potentially unsafe reasoning steps in real time. SFCoT incorporates a three-tier safety scoring system alongside a multi-perspective consistency verification mechanism, designed to detect potential risks throughout the reasoning process. A dynamic intervention module subsequently performs targeted calibration to redirect reasoning trajectories toward safe outcomes. Experimental results demonstrate that SFCoT reduces the attack success rate from $58.97\%$ to $12.31\%$, demonstrating it as an effective and efficient LLM safety enhancement method without a significant decline in general performance.
Learning Shortest Paths When Data is Scarce
Jan 07, 2026Digital twins and other simulators are increasingly used to support routing decisions in large-scale networks. However, simulator outputs often exhibit systematic bias, while ground-truth measurements are costly and scarce. We study a stochastic shortest-path problem in which a planner has access to abundant synthetic samples, limited real-world observations, and an edge-similarity structure capturing expected behavioral similarity across links. We model the simulator-to-reality discrepancy as an unknown, edge-specific bias that varies smoothly over the similarity graph, and estimate it using Laplacian-regularized least squares. This approach yields calibrated edge cost estimates even in data-scarce regimes. We establish finite-sample error bounds, translate estimation error into path-level suboptimality guarantees, and propose a computable, data-driven certificate that verifies near-optimality of a candidate route. For cold-start settings without initial real data, we develop a bias-aware active learning algorithm that leverages the simulator and adaptively selects edges to measure until a prescribed accuracy is met. Numerical experiments on multiple road networks and traffic graphs further demonstrate the effectiveness of our methods.
A data-physics hybrid generative model for patient-specific post-stroke motor rehabilitation using wearable sensor data
Dec 16, 2025Dynamic prediction of locomotor capacity after stroke is crucial for tailoring rehabilitation, yet current assessments provide only static impairment scores and do not indicate whether patients can safely perform specific tasks such as slope walking or stair climbing. Here, we develop a data-physics hybrid generative framework that reconstructs an individual stroke survivor's neuromuscular control from a single 20 m level-ground walking trial and predicts task-conditioned locomotion across rehabilitation scenarios. The system combines wearable-sensor kinematics, a proportional-derivative physics controller, a population Healthy Motion Atlas, and goal-conditioned deep reinforcement learning with behaviour cloning and generative adversarial imitation learning to generate physically plausible, patient-specific gait simulations for slopes and stairs. In 11 stroke survivors, the personalized controllers preserved idiosyncratic gait patterns while improving joint-angle and endpoint fidelity by 4.73% and 12.10%, respectively, and reducing training time to 25.56% relative to a physics-only baseline. In a multicentre pilot involving 21 inpatients, clinicians who used our locomotion predictions to guide task selection and difficulty obtained larger gains in Fugl-Meyer lower-extremity scores over 28 days of standard rehabilitation than control clinicians (mean change 6.0 versus 3.7 points). These findings indicate that our generative, task-predictive framework can augment clinical decision-making in post-stroke gait rehabilitation and provide a template for dynamically personalized motor recovery strategies.
QiNN-QJ: A Quantum-inspired Neural Network with Quantum Jump for Multimodal Sentiment Analysis
Oct 31, 2025Quantum theory provides non-classical principles, such as superposition and entanglement, that inspires promising paradigms in machine learning. However, most existing quantum-inspired fusion models rely solely on unitary or unitary-like transformations to generate quantum entanglement. While theoretically expressive, such approaches often suffer from training instability and limited generalizability. In this work, we propose a Quantum-inspired Neural Network with Quantum Jump (QiNN-QJ) for multimodal entanglement modelling. Each modality is firstly encoded as a quantum pure state, after which a differentiable module simulating the QJ operator transforms the separable product state into the entangled representation. By jointly learning Hamiltonian and Lindblad operators, QiNN-QJ generates controllable cross-modal entanglement among modalities with dissipative dynamics, where structured stochasticity and steady-state attractor properties serve to stabilize training and constrain entanglement shaping. The resulting entangled states are projected onto trainable measurement vectors to produce predictions. In addition to achieving superior performance over the state-of-the-art models on benchmark datasets, including CMU-MOSI, CMU-MOSEI, and CH-SIMS, QiNN-QJ facilitates enhanced post-hoc interpretability through von-Neumann entanglement entropy. This work establishes a principled framework for entangled multimodal fusion and paves the way for quantum-inspired approaches in modelling complex cross-modal correlations.
S2ST-Omni: An Efficient and Scalable Multilingual Speech-to-Speech Translation Framework via Seamlessly Speech-Text Alignment and Streaming Speech Decoder
Jun 16, 2025

Multilingual speech-to-speech translation (S2ST) aims to directly convert spoken utterances from multiple source languages into fluent and intelligible speech in a target language. Despite recent progress, several critical challenges persist: 1) achieving high-quality and low-latency S2ST remains a significant obstacle; 2) most existing S2ST methods rely heavily on large-scale parallel speech corpora, which are difficult and resource-intensive to obtain. To tackle these challenges, we introduce S2ST-Omni, a novel, efficient, and scalable framework tailored for multilingual speech-to-speech translation. To enable high-quality S2TT while mitigating reliance on large-scale parallel speech corpora, we leverage powerful pretrained models: Whisper for robust audio understanding and Qwen 3.0 for advanced text comprehension. A lightweight speech adapter is introduced to bridge the modality gap between speech and text representations, facilitating effective utilization of pretrained multimodal knowledge. To ensure both translation accuracy and real-time responsiveness, we adopt a streaming speech decoder in the TTS stage, which generates the target speech in an autoregressive manner. Extensive experiments conducted on the CVSS benchmark demonstrate that S2ST-Omni consistently surpasses several state-of-the-art S2ST baselines in translation quality, highlighting its effectiveness and superiority.
Learning and Interpreting Gravitational-Wave Features from CNNs with a Random Forest Approach
May 26, 2025Convolutional neural networks (CNNs) have become widely adopted in gravitational wave (GW) detection pipelines due to their ability to automatically learn hierarchical features from raw strain data. However, the physical meaning of these learned features remains underexplored, limiting the interpretability of such models. In this work, we propose a hybrid architecture that combines a CNN-based feature extractor with a random forest (RF) classifier to improve both detection performance and interpretability. Unlike prior approaches that directly connect classifiers to CNN outputs, our method introduces four physically interpretable metrics - variance, signal-to-noise ratio (SNR), waveform overlap, and peak amplitude - computed from the final convolutional layer. These are jointly used with the CNN output in the RF classifier to enable more informed decision boundaries. Tested on long-duration strain datasets, our hybrid model outperforms a baseline CNN model, achieving a relative improvement of 21\% in sensitivity at a fixed false alarm rate of 10 events per month. Notably, it also shows improved detection of low-SNR signals (SNR $\le$ 10), which are especially vulnerable to misclassification in noisy environments. Feature attribution via the RF model reveals that both CNN-extracted and handcrafted features contribute significantly to classification decisions, with learned variance and CNN outputs ranked among the most informative. These findings suggest that physically motivated post-processing of CNN feature maps can serve as a valuable tool for interpretable and efficient GW detection, bridging the gap between deep learning and domain knowledge.
ClapFM-EVC: High-Fidelity and Flexible Emotional Voice Conversion with Dual Control from Natural Language and Speech
May 20, 2025



Despite great advances, achieving high-fidelity emotional voice conversion (EVC) with flexible and interpretable control remains challenging. This paper introduces ClapFM-EVC, a novel EVC framework capable of generating high-quality converted speech driven by natural language prompts or reference speech with adjustable emotion intensity. We first propose EVC-CLAP, an emotional contrastive language-audio pre-training model, guided by natural language prompts and categorical labels, to extract and align fine-grained emotional elements across speech and text modalities. Then, a FuEncoder with an adaptive intensity gate is presented to seamless fuse emotional features with Phonetic PosteriorGrams from a pre-trained ASR model. To further improve emotion expressiveness and speech naturalness, we propose a flow matching model conditioned on these captured features to reconstruct Mel-spectrogram of source speech. Subjective and objective evaluations validate the effectiveness of ClapFM-EVC.
Pangu Ultra MoE: How to Train Your Big MoE on Ascend NPUs
May 07, 2025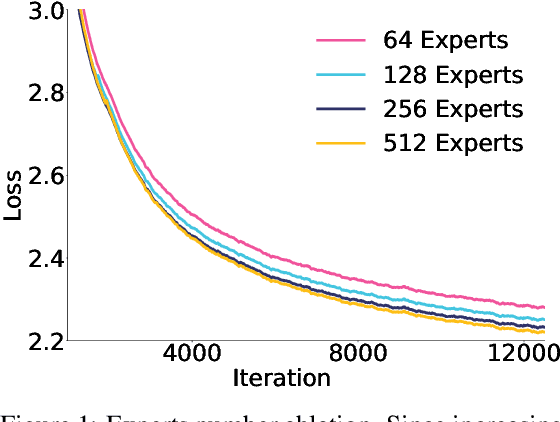

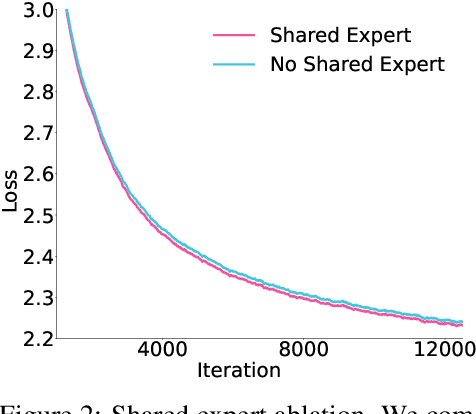

Sparse large language models (LLMs) with Mixture of Experts (MoE) and close to a trillion parameters are dominating the realm of most capable language models. However, the massive model scale poses significant challenges for the underlying software and hardware systems. In this paper, we aim to uncover a recipe to harness such scale on Ascend NPUs. The key goals are better usage of the computing resources under the dynamic sparse model structures and materializing the expected performance gain on the actual hardware. To select model configurations suitable for Ascend NPUs without repeatedly running the expensive experiments, we leverage simulation to compare the trade-off of various model hyperparameters. This study led to Pangu Ultra MoE, a sparse LLM with 718 billion parameters, and we conducted experiments on the model to verify the simulation results. On the system side, we dig into Expert Parallelism to optimize the communication between NPU devices to reduce the synchronization overhead. We also optimize the memory efficiency within the devices to further reduce the parameter and activation management overhead. In the end, we achieve an MFU of 30.0% when training Pangu Ultra MoE, with performance comparable to that of DeepSeek R1, on 6K Ascend NPUs, and demonstrate that the Ascend system is capable of harnessing all the training stages of the state-of-the-art language models. Extensive experiments indicate that our recipe can lead to efficient training of large-scale sparse language models with MoE. We also study the behaviors of such models for future reference.