 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating Gemini Robotics Policies in a Veo World Simulator
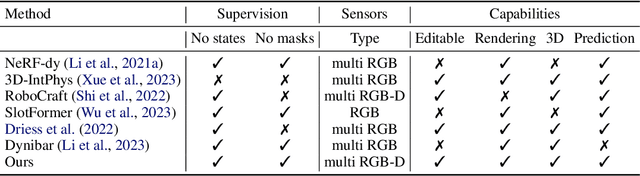
Dec 11, 2025Generative world models hold significant potential for simulating interactions with visuomotor policies in varied environments. Frontier video models can enable generation of realistic observations and environment interactions in a scalable and general manner. However, the use of video models in robotics has been limited primarily to in-distribution evaluations, i.e., scenarios that are similar to ones used to train the policy or fine-tune the base video model. In this report, we demonstrate that video models can be used for the entire spectrum of policy evaluation use cases in robotics: from assessing nominal performance to out-of-distribution (OOD) generalization, and probing physical and semantic safety. We introduce a generative evaluation system built upon a frontier video foundation model (Veo). The system is optimized to support robot action conditioning and multi-view consistency, while integrating generative image-editing and multi-view completion to synthesize realistic variations of real-world scenes along multiple axes of generalization. We demonstrate that the system preserves the base capabilities of the video model to enable accurate simulation of scenes that have been edited to include novel interaction objects, novel visual backgrounds, and novel distractor objects. This fidelity enables accurately predicting the relative performance of different policies in both nominal and OOD conditions, determining the relative impact of different axes of generalization on policy performance, and performing red teaming of policies to expose behaviors that violate physical or semantic safety constraints. We validate these capabilities through 1600+ real-world evaluations of eight Gemini Robotics policy checkpoints and five tasks for a bimanual manipulator.
Direct Motion Models for Assessing Generated Videos
Apr 30, 2025A current limitation of video generative video models is that they generate plausible looking frames, but poor motion -- an issue that is not well captured by FVD and other popular methods for evaluating generated videos. Here we go beyond FVD by developing a metric which better measures plausible object interactions and motion. Our novel approach is based on auto-encoding point tracks and yields motion features that can be used to not only compare distributions of videos (as few as one generated and one ground truth, or as many as two datasets), but also for evaluating motion of single videos. We show that using point tracks instead of pixel reconstruction or action recognition features results in a metric which is markedly more sensitive to temporal distortions in synthetic data, and can predict human evaluations of temporal consistency and realism in generated videos obtained from open-source models better than a wide range of alternatives. We also show that by using a point track representation, we can spatiotemporally localize generative video inconsistencies, providing extra interpretability of generated video errors relative to prior work. An overview of the results and link to the code can be found on the project page: http://trajan-paper.github.io.
Moving Off-the-Grid: Scene-Grounded Video Representations
Nov 08, 2024



Current vision models typically maintain a fixed correspondence between their representation structure and image space. Each layer comprises a set of tokens arranged "on-the-grid," which biases patches or tokens to encode information at a specific spatio(-temporal) location. In this work we present Moving Off-the-Grid (MooG), a self-supervised video representation model that offers an alternative approach, allowing tokens to move "off-the-grid" to better enable them to represent scene elements consistently, even as they move across the image plane through time. By using a combination of cross-attention and positional embeddings we disentangle the representation structure and image structure. We find that a simple self-supervised objective--next frame prediction--trained on video data, results in a set of latent tokens which bind to specific scene structures and track them as they move. We demonstrate the usefulness of MooG's learned representation both qualitatively and quantitatively by training readouts on top of the learned representation on a variety of downstream tasks. We show that MooG can provide a strong foundation for different vision tasks when compared to "on-the-grid" baselines.
Neural Assets: 3D-Aware Multi-Object Scene Synthesis with Image Diffusion Models
Jun 13, 2024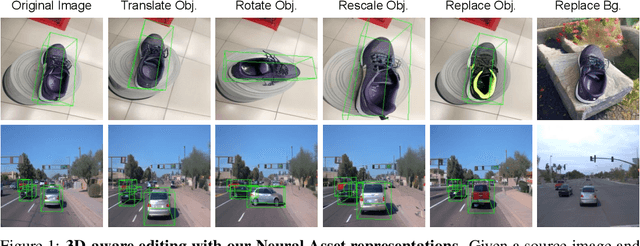
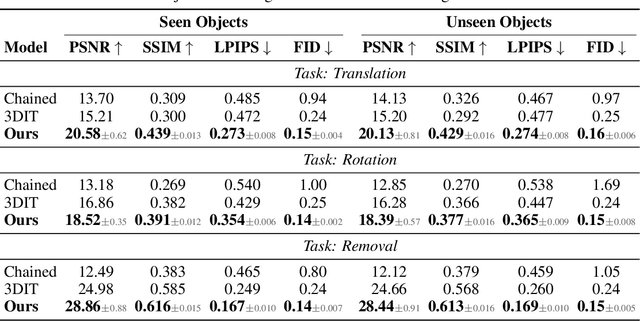

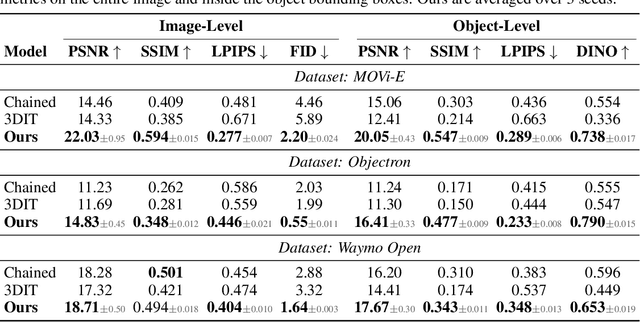
We address the problem of multi-object 3D pose control in image diffusion models. Instead of conditioning on a sequence of text tokens, we propose to use a set of per-object representations, Neural Assets, to control the 3D pose of individual objects in a scene. Neural Assets are obtained by pooling visual representations of objects from a reference image, such as a frame in a video, and are trained to reconstruct the respective objects in a different image, e.g., a later frame in the video. Importantly, we encode object visuals from the reference image while conditioning on object poses from the target frame. This enables learning disentangled appearance and pose features. Combining visual and 3D pose representations in a sequence-of-tokens format allows us to keep the text-to-image architecture of existing models, with Neural Assets in place of text tokens. By fine-tuning a pre-trained text-to-image diffusion model with this information, our approach enables fine-grained 3D pose and placement control of individual objects in a scene. We further demonstrate that Neural Assets can be transferred and recomposed across different scenes. Our model achieves state-of-the-art multi-object editing results on both synthetic 3D scene datasets, as well as two real-world video datasets (Objectron, Waymo Open).
Learning rigid-body simulators over implicit shapes for large-scale scenes and vision
May 22, 2024Simulating large scenes with many rigid objects is crucial for a variety of applications, such as robotics, engineering, film and video games. Rigid interactions are notoriously hard to model: small changes to the initial state or the simulation parameters can lead to large changes in the final state. Recently, learned simulators based on graph networks (GNNs) were developed as an alternative to hand-designed simulators like MuJoCo and PyBullet. They are able to accurately capture dynamics of real objects directly from real-world observations. However, current state-of-the-art learned simulators operate on meshes and scale poorly to scenes with many objects or detailed shapes. Here we present SDF-Sim, the first learned rigid-body simulator designed for scale. We use learned signed-distance functions (SDFs) to represent the object shapes and to speed up distance computation. We design the simulator to leverage SDFs and avoid the fundamental bottleneck of the previous simulators associated with collision detection. For the first time in literature, we demonstrate that we can scale the GNN-based simulators to scenes with hundreds of objects and up to 1.1 million nodes, where mesh-based approaches run out of memory. Finally, we show that SDF-Sim can be applied to real world scenes by extracting SDFs from multi-view images.
Scaling Face Interaction Graph Networks to Real World Scenes
Jan 22, 2024Accurately simulating real world object dynamics is essential for various applications such as robotics, engineering, graphics, and design. To better capture complex real dynamics such as contact and friction, learned simulators based on graph networks have recently shown great promise. However, applying these learned simulators to real scenes comes with two major challenges: first, scaling learned simulators to handle the complexity of real world scenes which can involve hundreds of objects each with complicated 3D shapes, and second, handling inputs from perception rather than 3D state information. Here we introduce a method which substantially reduces the memory required to run graph-based learned simulators. Based on this memory-efficient simulation model, we then present a perceptual interface in the form of editable NeRFs which can convert real-world scenes into a structured representation that can be processed by graph network simulator. We show that our method uses substantially less memory than previous graph-based simulators while retaining their accuracy, and that the simulators learned in synthetic environments can be applied to real world scenes captured from multiple camera angles. This paves the way for expanding the application of learned simulators to settings where only perceptual information is available at inference time.
Learning 3D Particle-based Simulators from RGB-D Videos
Dec 08, 2023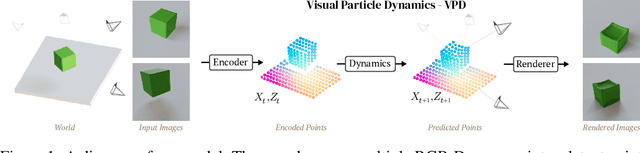
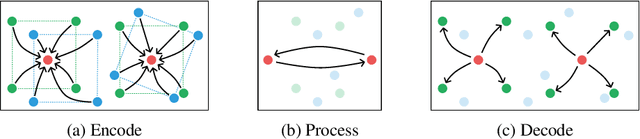
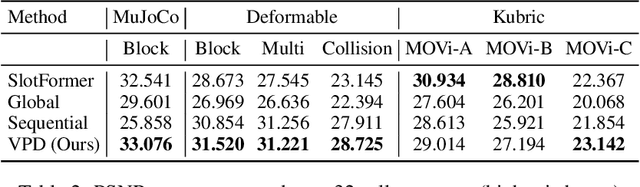
Realistic simulation is critical for applications ranging from robotics to animation. Traditional analytic simulators sometimes struggle to capture sufficiently realistic simulation which can lead to problems including the well known "sim-to-real" gap in robotics. Learned simulators have emerged as an alternative for better capturing real-world physical dynamics, but require access to privileged ground truth physics information such as precise object geometry or particle tracks. Here we propose a method for learning simulators directly from observations. Visual Particle Dynamics (VPD) jointly learns a latent particle-based representation of 3D scenes, a neural simulator of the latent particle dynamics, and a renderer that can produce images of the scene from arbitrary views. VPD learns end to end from posed RGB-D videos and does not require access to privileged information. Unlike existing 2D video prediction models, we show that VPD's 3D structure enables scene editing and long-term predictions. These results pave the way for downstream applications ranging from video editing to robotic planning.
Learning rigid dynamics with face interaction graph networks
Dec 07, 2022



Simulating rigid collisions among arbitrary shapes is notoriously difficult due to complex geometry and the strong non-linearity of the interactions. While graph neural network (GNN)-based models are effective at learning to simulate complex physical dynamics, such as fluids, cloth and articulated bodies, they have been less effective and efficient on rigid-body physics, except with very simple shapes. Existing methods that model collisions through the meshes' nodes are often inaccurate because they struggle when collisions occur on faces far from nodes. Alternative approaches that represent the geometry densely with many particles are prohibitively expensive for complex shapes. Here we introduce the Face Interaction Graph Network (FIGNet) which extends beyond GNN-based methods, and computes interactions between mesh faces, rather than nodes. Compared to learned node- and particle-based methods, FIGNet is around 4x more accurate in simulating complex shape interactions, while also 8x more computationally efficient on sparse, rigid meshes. Moreover, FIGNet can learn frictional dynamics directly from real-world data, and can be more accurate than analytical solvers given modest amounts of training data. FIGNet represents a key step forward in one of the few remaining physical domains which have seen little competition from learned simulators, and offers allied fields such as robotics, graphics and mechanical design a new tool for simulation and model-based planning.
A Generalist Neural Algorithmic Learner
Sep 22, 2022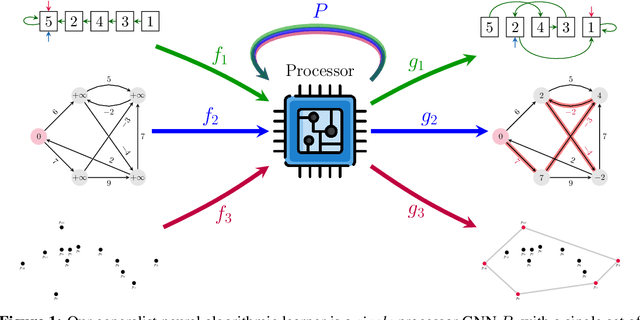
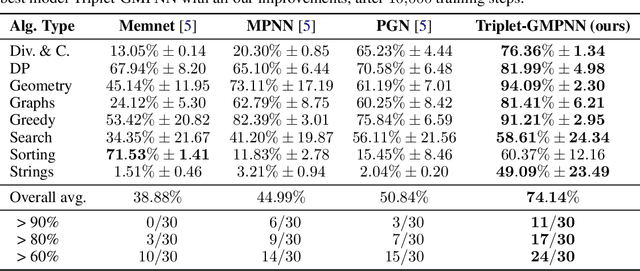
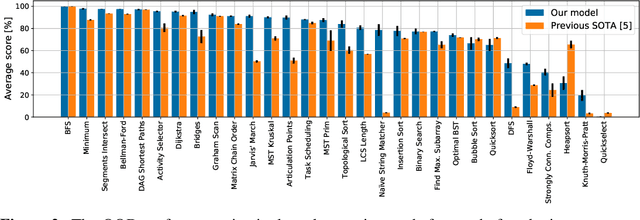
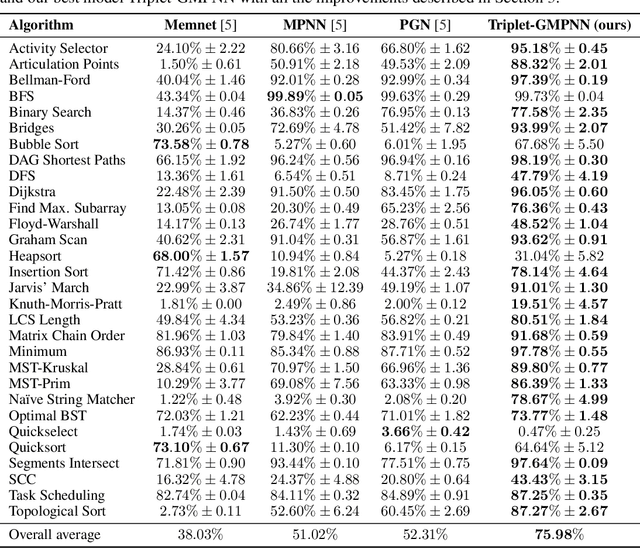
The cornerstone of neural algorithmic reasoning is the ability to solve algorithmic tasks, especially in a way that generalises out of distribution. While recent years have seen a surge in methodological improvements in this area, they mostly focused on building specialist models. Specialist models are capable of learning to neurally execute either only one algorithm or a collection of algorithms with identical control-flow backbone. Here, instead, we focus on constructing a generalist neural algorithmic learner -- a single graph neural network processor capable of learning to execute a wide range of algorithms, such as sorting, searching, dynamic programming, path-finding and geometry. We leverage the CLRS benchmark to empirically show that, much like recent successes in the domain of perception, generalist algorithmic learners can be built by "incorporating" knowledge. That is, it is possible to effectively learn algorithms in a multi-task manner, so long as we can learn to execute them well in a single-task regime. Motivated by this, we present a series of improvements to the input representation, training regime and processor architecture over CLRS, improving average single-task performance by over 20% from prior art. We then conduct a thorough ablation of multi-task learners leveraging these improvements. Our results demonstrate a generalist learner that effectively incorporates knowledge captured by specialist models.
Constraint-based graph network simulator
Dec 16, 2021
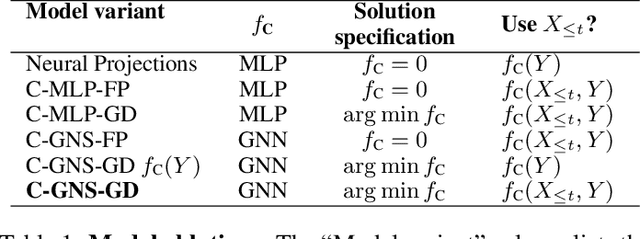

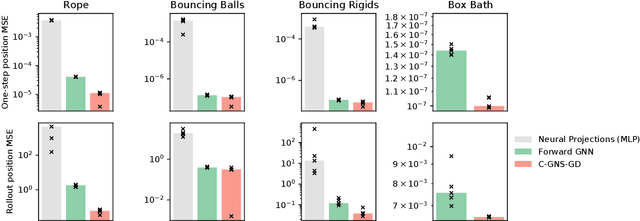
In the rapidly advancing area of learned physical simulators, nearly all methods train forward models that directly predict future states from input states. However, many traditional simulation engines use a constraint-based approach instead of direct prediction. Here we present a framework for constraint-based learned simulation, where a scalar constraint function is implemented as a neural network, and future predictions are computed as the solutions to optimization problems under these learned constraints. We implement our method using a graph neural network as the constraint function and gradient descent as the constraint solver. The architecture can be trained by standard backpropagation. We test the model on a variety of challenging physical domains, including simulated ropes, bouncing balls, colliding irregular shapes and splashing fluids. Our model achieves better or comparable performance to top learned simulators. A key advantage of our model is the ability to generalize to more solver iterations at test time to improve the simulation accuracy. We also show how hand-designed constraints can be added at test time to satisfy objectives which were not present in the training data, which is not possible with forward approaches. Our constraint-based framework is applicable to any setting where forward learned simulators are used, and demonstrates how learned simulators can leverage additional inductive biases as well as the techniques from the field of numerical methods.