 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIVRA: Improving Visual-Token Relations for Robot Action Policy with Training-Free Hint-Based Guidance
Jan 22, 2026Many Vision-Language-Action (VLA) models flatten image patches into a 1D token sequence, weakening the 2D spatial cues needed for precise manipulation. We introduce IVRA, a lightweight, training-free method that improves spatial understanding by exploiting affinity hints already available in the model's built-in vision encoder, without requiring any external encoder or retraining. IVRA selectively injects these affinity signals into a language-model layer in which instance-level features reside. This inference-time intervention realigns visual-token interactions and better preserves geometric structure while keeping all model parameters fixed. We demonstrate the generality of IVRA by applying it to diverse VLA architectures (LLaRA, OpenVLA, and FLOWER) across simulated benchmarks spanning both 2D and 3D manipulation (VIMA and LIBERO) and on various real-robot tasks. On 2D VIMA, IVRA improves average success by +4.2% over the baseline LLaRA in a low-data regime. On 3D LIBERO, it yields consistent gains over the OpenVLA and FLOWER baselines, including improvements when baseline accuracy is near saturation (96.3% to 97.1%). All code and models will be released publicly. Visualizations are available at: jongwoopark7978.github.io/IVRA
Future Optical Flow Prediction Improves Robot Control & Video Generation
Jan 15, 2026Future motion representations, such as optical flow, offer immense value for control and generative tasks. However, forecasting generalizable spatially dense motion representations remains a key challenge, and learning such forecasting from noisy, real-world data remains relatively unexplored. We introduce FOFPred, a novel language-conditioned optical flow forecasting model featuring a unified Vision-Language Model (VLM) and Diffusion architecture. This unique combination enables strong multimodal reasoning with pixel-level generative fidelity for future motion prediction. Our model is trained on web-scale human activity data-a highly scalable but unstructured source. To extract meaningful signals from this noisy video-caption data, we employ crucial data preprocessing techniques and our unified architecture with strong image pretraining. The resulting trained model is then extended to tackle two distinct downstream tasks in control and generation. Evaluations across robotic manipulation and video generation under language-driven settings establish the cross-domain versatility of FOFPred, confirming the value of a unified VLM-Diffusion architecture and scalable learning from diverse web data for future optical flow prediction.
Robotic VLA Benefits from Joint Learning with Motion Image Diffusion
Dec 19, 2025Vision-Language-Action (VLA) models have achieved remarkable progress in robotic manipulation by mapping multimodal observations and instructions directly to actions. However, they typically mimic expert trajectories without predictive motion reasoning, which limits their ability to reason about what actions to take. To address this limitation, we propose joint learning with motion image diffusion, a novel strategy that enhances VLA models with motion reasoning capabilities. Our method extends the VLA architecture with a dual-head design: while the action head predicts action chunks as in vanilla VLAs, an additional motion head, implemented as a Diffusion Transformer (DiT), predicts optical-flow-based motion images that capture future dynamics. The two heads are trained jointly, enabling the shared VLM backbone to learn representations that couple robot control with motion knowledge. This joint learning builds temporally coherent and physically grounded representations without modifying the inference pathway of standard VLAs, thereby maintaining test-time latency. Experiments in both simulation and real-world environments demonstrate that joint learning with motion image diffusion improves the success rate of pi-series VLAs to 97.5% on the LIBERO benchmark and 58.0% on the RoboTwin benchmark, yielding a 23% improvement in real-world performance and validating its effectiveness in enhancing the motion reasoning capability of large-scale VLAs.
Pixel Motion Diffusion is What We Need for Robot Control
Sep 26, 2025We present DAWN (Diffusion is All We Need for robot control), a unified diffusion-based framework for language-conditioned robotic manipulation that bridges high-level motion intent and low-level robot action via structured pixel motion representation. In DAWN, both the high-level and low-level controllers are modeled as diffusion processes, yielding a fully trainable, end-to-end system with interpretable intermediate motion abstractions. DAWN achieves state-of-the-art results on the challenging CALVIN benchmark, demonstrating strong multi-task performance, and further validates its effectiveness on MetaWorld. Despite the substantial domain gap between simulation and reality and limited real-world data, we demonstrate reliable real-world transfer with only minimal finetuning, illustrating the practical viability of diffusion-based motion abstractions for robotic control. Our results show the effectiveness of combining diffusion modeling with motion-centric representations as a strong baseline for scalable and robust robot learning. Project page: https://nero1342.github.io/DAWN/
Pixel Motion as Universal Representation for Robot Control
May 12, 2025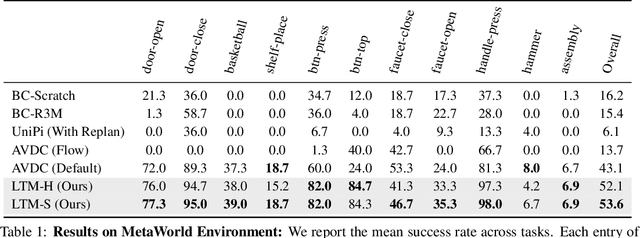
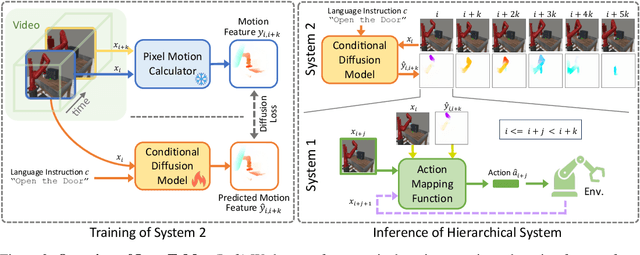
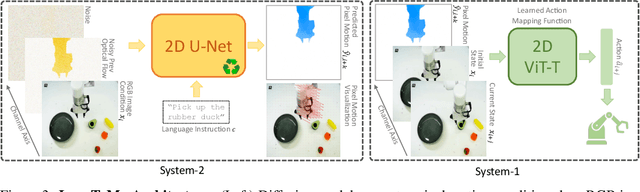
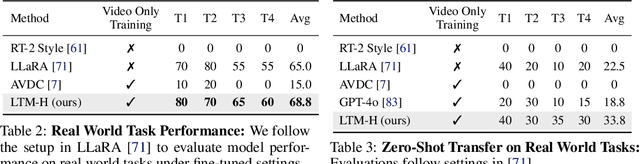
We present LangToMo, a vision-language-action framework structured as a dual-system architecture that uses pixel motion forecasts as intermediate representations. Our high-level System 2, an image diffusion model, generates text-conditioned pixel motion sequences from a single frame to guide robot control. Pixel motion-a universal, interpretable, and motion-centric representation-can be extracted from videos in a self-supervised manner, enabling diffusion model training on web-scale video-caption data. Treating generated pixel motion as learned universal representations, our low level System 1 module translates these into robot actions via motion-to-action mapping functions, which can be either hand-crafted or learned with minimal supervision. System 2 operates as a high-level policy applied at sparse temporal intervals, while System 1 acts as a low-level policy at dense temporal intervals. This hierarchical decoupling enables flexible, scalable, and generalizable robot control under both unsupervised and supervised settings, bridging the gap between language, motion, and action. Checkout https://kahnchana.github.io/LangToMo for visualizations.
Test-Time Optimization for Domain Adaptive Open Vocabulary Segmentation
Jan 08, 2025



We present Seg-TTO, a novel framework for zero-shot, open-vocabulary semantic segmentation (OVSS), designed to excel in specialized domain tasks. While current open vocabulary approaches show impressive performance on standard segmentation benchmarks under zero-shot settings, they fall short of supervised counterparts on highly domain-specific datasets. We focus on segmentation-specific test-time optimization to address this gap. Segmentation requires an understanding of multiple concepts within a single image while retaining the locality and spatial structure of representations. We propose a novel self-supervised objective adhering to these requirements and use it to align the model parameters with input images at test time. In the textual modality, we learn multiple embeddings for each category to capture diverse concepts within an image, while in the visual modality, we calculate pixel-level losses followed by embedding aggregation operations specific to preserving spatial structure. Our resulting framework termed Seg-TTO is a plug-in-play module. We integrate Seg-TTO with three state-of-the-art OVSS approaches and evaluate across 22 challenging OVSS tasks covering a range of specialized domains. Our Seg-TTO demonstrates clear performance improvements across these establishing new state-of-the-art. Code: https://github.com/UlinduP/SegTTO.
LatentCRF: Continuous CRF for Efficient Latent Diffusion
Dec 24, 2024



Latent Diffusion Models (LDMs) produce high-quality, photo-realistic images, however, the latency incurred by multiple costly inference iterations can restrict their applicability. We introduce LatentCRF, a continuous Conditional Random Field (CRF) model, implemented as a neural network layer, that models the spatial and semantic relationships among the latent vectors in the LDM. By replacing some of the computationally-intensive LDM inference iterations with our lightweight LatentCRF, we achieve a superior balance between quality, speed and diversity. We increase inference efficiency by 33% with no loss in image quality or diversity compared to the full LDM. LatentCRF is an easy add-on, which does not require modifying the LDM.
LLaRA: Supercharging Robot Learning Data for Vision-Language Policy
Jun 28, 2024
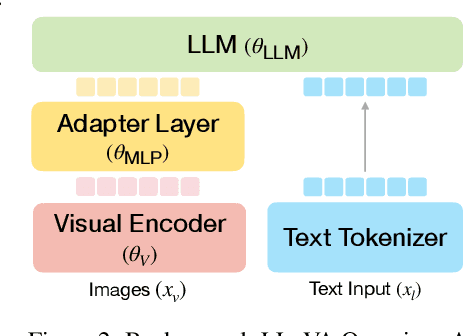
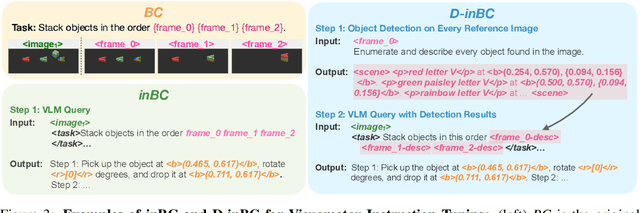

Large Language Models (LLMs) equipped with extensive world knowledge and strong reasoning skills can tackle diverse tasks across domains, often by posing them as conversation-style instruction-response pairs. In this paper, we propose LLaRA: Large Language and Robotics Assistant, a framework which formulates robot action policy as conversations, and provides improved responses when trained with auxiliary data that complements policy learning. LLMs with visual inputs, i.e., Vision Language Models (VLMs), have the capacity to process state information as visual-textual prompts and generate optimal policy decisions in text. To train such action policy VLMs, we first introduce an automated pipeline to generate diverse high-quality robotics instruction data from existing behavior cloning data. A VLM finetuned with the resulting collection of datasets based on a conversation-style formulation tailored for robotics tasks, can generate meaningful robot action policy decisions. Our experiments across multiple simulated and real-world environments demonstrate the state-of-the-art performance of the proposed LLaRA framework. The code, datasets, and pretrained models are available at https://github.com/LostXine/LLaRA.
Too Many Frames, not all Useful:Efficient Strategies for Long-Form Video QA
Jun 17, 2024



Long-form videos that span across wide temporal intervals are highly information redundant and contain multiple distinct events or entities that are often loosely-related. Therefore, when performing long-form video question answering (LVQA),all information necessary to generate a correct response can often be contained within a small subset of frames. Recent literature explore the use of large language models (LLMs) in LVQA benchmarks, achieving exceptional performance, while relying on vision language models (VLMs) to convert all visual content within videos into natural language. Such VLMs often independently caption a large number of frames uniformly sampled from long videos, which is not efficient and can mostly be redundant. Questioning these decision choices, we explore optimal strategies for key-frame selection and sequence-aware captioning, that can significantly reduce these redundancies. We propose two novel approaches that improve each of aspects, namely Hierarchical Keyframe Selector and Sequential Visual LLM. Our resulting framework termed LVNet achieves state-of-the-art performance across three benchmark LVQA datasets. Our code will be released publicly.
Learning to Localize Objects Improves Spatial Reasoning in Visual-LLMs
Apr 11, 2024



Integration of Large Language Models (LLMs) into visual domain tasks, resulting in visual-LLMs (V-LLMs), has enabled exceptional performance in vision-language tasks, particularly for visual question answering (VQA). However, existing V-LLMs (e.g. BLIP-2, LLaVA) demonstrate weak spatial reasoning and localization awareness. Despite generating highly descriptive and elaborate textual answers, these models fail at simple tasks like distinguishing a left vs right location. In this work, we explore how image-space coordinate based instruction fine-tuning objectives could inject spatial awareness into V-LLMs. We discover optimal coordinate representations, data-efficient instruction fine-tuning objectives, and pseudo-data generation strategies that lead to improved spatial awareness in V-LLMs. Additionally, our resulting model improves VQA across image and video domains, reduces undesired hallucination, and generates better contextual object descriptions. Experiments across 5 vision-language tasks involving 14 different datasets establish the clear performance improvements achieved by our proposed framework.