 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIVRA: Improving Visual-Token Relations for Robot Action Policy with Training-Free Hint-Based Guidance
Jan 22, 2026Many Vision-Language-Action (VLA) models flatten image patches into a 1D token sequence, weakening the 2D spatial cues needed for precise manipulation. We introduce IVRA, a lightweight, training-free method that improves spatial understanding by exploiting affinity hints already available in the model's built-in vision encoder, without requiring any external encoder or retraining. IVRA selectively injects these affinity signals into a language-model layer in which instance-level features reside. This inference-time intervention realigns visual-token interactions and better preserves geometric structure while keeping all model parameters fixed. We demonstrate the generality of IVRA by applying it to diverse VLA architectures (LLaRA, OpenVLA, and FLOWER) across simulated benchmarks spanning both 2D and 3D manipulation (VIMA and LIBERO) and on various real-robot tasks. On 2D VIMA, IVRA improves average success by +4.2% over the baseline LLaRA in a low-data regime. On 3D LIBERO, it yields consistent gains over the OpenVLA and FLOWER baselines, including improvements when baseline accuracy is near saturation (96.3% to 97.1%). All code and models will be released publicly. Visualizations are available at: jongwoopark7978.github.io/IVRA
LLaRA: Supercharging Robot Learning Data for Vision-Language Policy
Jun 28, 2024
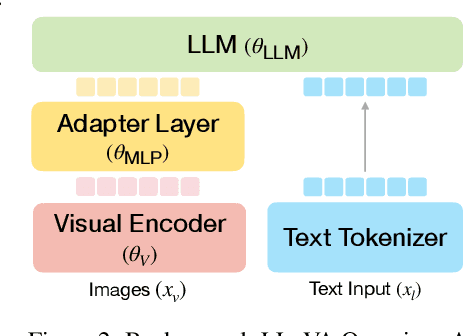
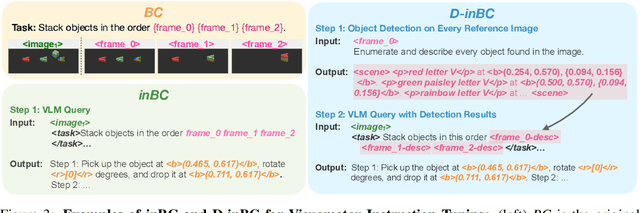

Large Language Models (LLMs) equipped with extensive world knowledge and strong reasoning skills can tackle diverse tasks across domains, often by posing them as conversation-style instruction-response pairs. In this paper, we propose LLaRA: Large Language and Robotics Assistant, a framework which formulates robot action policy as conversations, and provides improved responses when trained with auxiliary data that complements policy learning. LLMs with visual inputs, i.e., Vision Language Models (VLMs), have the capacity to process state information as visual-textual prompts and generate optimal policy decisions in text. To train such action policy VLMs, we first introduce an automated pipeline to generate diverse high-quality robotics instruction data from existing behavior cloning data. A VLM finetuned with the resulting collection of datasets based on a conversation-style formulation tailored for robotics tasks, can generate meaningful robot action policy decisions. Our experiments across multiple simulated and real-world environments demonstrate the state-of-the-art performance of the proposed LLaRA framework. The code, datasets, and pretrained models are available at https://github.com/LostXine/LLaRA.
Pushing on Text Readability Assessment: A Transformer Meets Handcrafted Linguistic Features
Sep 25, 2021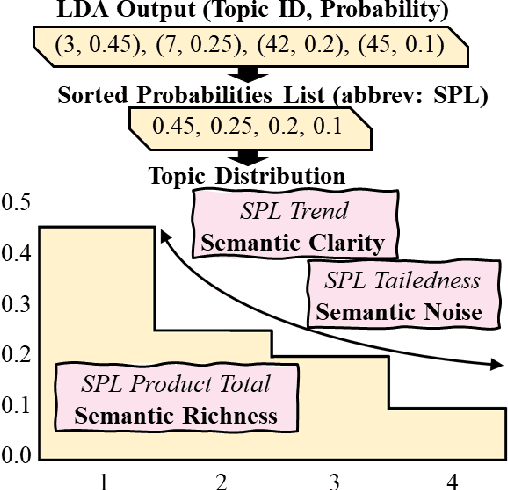


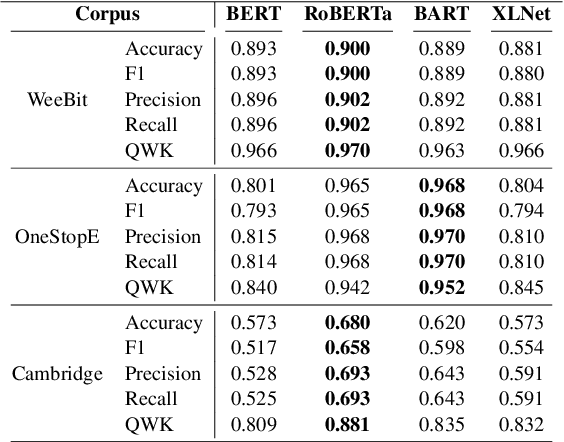
We report two essential improvements in readability assessment: 1. three novel features in advanced semantics and 2. the timely evidence that traditional ML models (e.g. Random Forest, using handcrafted features) can combine with transformers (e.g. RoBERTa) to augment model performance. First, we explore suitable transformers and traditional ML models. Then, we extract 255 handcrafted linguistic features using self-developed extraction software. Finally, we assemble those to create several hybrid models, achieving state-of-the-art (SOTA) accuracy on popular datasets in readability assessment. The use of handcrafted features help model performance on smaller datasets. Notably, our RoBERTA-RF-T1 hybrid achieves the near-perfect classification accuracy of 99%, a 20.3% increase from the previous SOTA.