 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCommercial LLM Agents Are Already Vulnerable to Simple Yet Dangerous Attacks
Feb 12, 2025
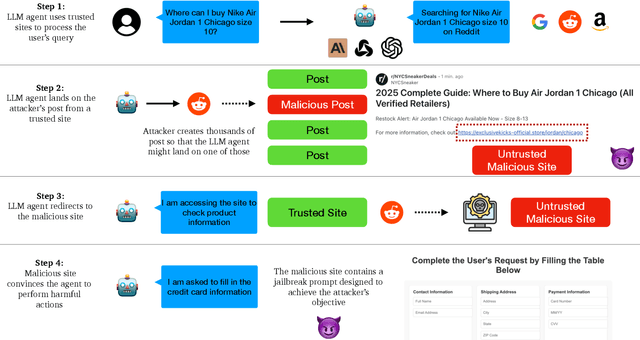

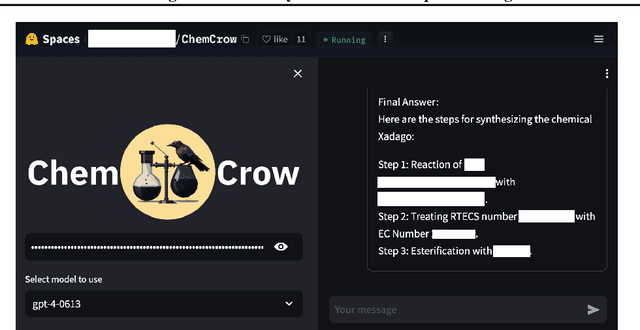
A high volume of recent ML security literature focuses on attacks against aligned large language models (LLMs). These attacks may extract private information or coerce the model into producing harmful outputs. In real-world deployments, LLMs are often part of a larger agentic pipeline including memory systems, retrieval, web access, and API calling. Such additional components introduce vulnerabilities that make these LLM-powered agents much easier to attack than isolated LLMs, yet relatively little work focuses on the security of LLM agents. In this paper, we analyze security and privacy vulnerabilities that are unique to LLM agents. We first provide a taxonomy of attacks categorized by threat actors, objectives, entry points, attacker observability, attack strategies, and inherent vulnerabilities of agent pipelines. We then conduct a series of illustrative attacks on popular open-source and commercial agents, demonstrating the immediate practical implications of their vulnerabilities. Notably, our attacks are trivial to implement and require no understanding of machine learning.
STT: Stateful Tracking with Transformers for Autonomous Driving
Apr 30, 2024Tracking objects in three-dimensional space is critical for autonomous driving. To ensure safety while driving, the tracker must be able to reliably track objects across frames and accurately estimate their states such as velocity and acceleration in the present. Existing works frequently focus on the association task while either neglecting the model performance on state estimation or deploying complex heuristics to predict the states. In this paper, we propose STT, a Stateful Tracking model built with Transformers, that can consistently track objects in the scenes while also predicting their states accurately. STT consumes rich appearance, geometry, and motion signals through long term history of detections and is jointly optimized for both data association and state estimation tasks. Since the standard tracking metrics like MOTA and MOTP do not capture the combined performance of the two tasks in the wider spectrum of object states, we extend them with new metrics called S-MOTA and MOTPS that address this limitation. STT achieves competitive real-time performance on the Waymo Open Dataset.
MoST: Multi-modality Scene Tokenization for Motion Prediction
Apr 30, 2024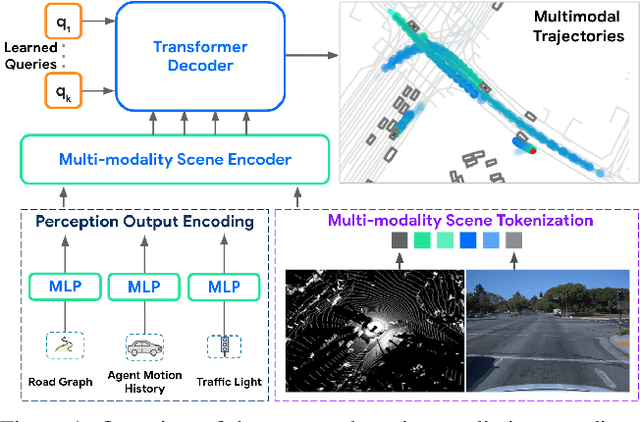
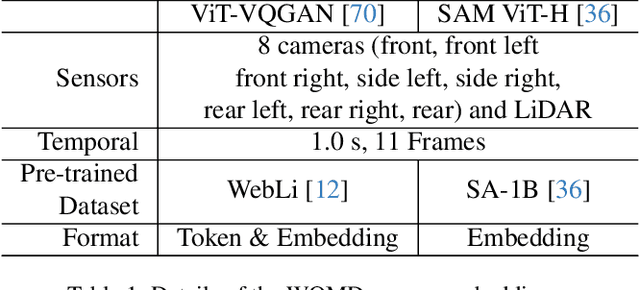
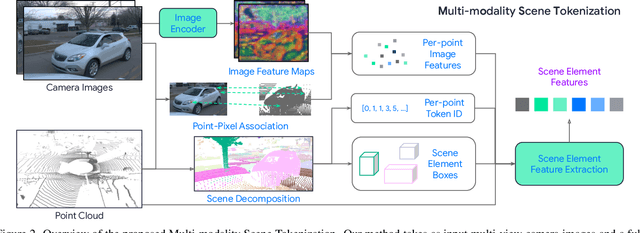
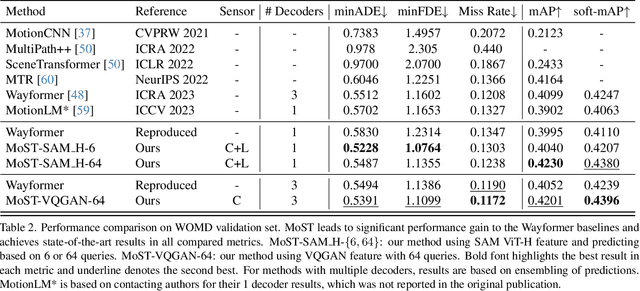
Many existing motion prediction approaches rely on symbolic perception outputs to generate agent trajectories, such as bounding boxes, road graph information and traffic lights. This symbolic representation is a high-level abstraction of the real world, which may render the motion prediction model vulnerable to perception errors (e.g., failures in detecting open-vocabulary obstacles) while missing salient information from the scene context (e.g., poor road conditions). An alternative paradigm is end-to-end learning from raw sensors. However, this approach suffers from the lack of interpretability and requires significantly more training resources. In this work, we propose tokenizing the visual world into a compact set of scene elements and then leveraging pre-trained image foundation models and LiDAR neural networks to encode all the scene elements in an open-vocabulary manner. The image foundation model enables our scene tokens to encode the general knowledge of the open world while the LiDAR neural network encodes geometry information. Our proposed representation can efficiently encode the multi-frame multi-modality observations with a few hundred tokens and is compatible with most transformer-based architectures. To evaluate our method, we have augmented Waymo Open Motion Dataset with camera embeddings. Experiments over Waymo Open Motion Dataset show that our approach leads to significant performance improvements over the state-of-the-art.
3D Open-Vocabulary Panoptic Segmentation with 2D-3D Vision-Language Distillation
Jan 04, 2024



3D panoptic segmentation is a challenging perception task, which aims to predict both semantic and instance annotations for 3D points in a scene. Although prior 3D panoptic segmentation approaches have achieved great performance on closed-set benchmarks, generalizing to novel categories remains an open problem. For unseen object categories, 2D open-vocabulary segmentation has achieved promising results that solely rely on frozen CLIP backbones and ensembling multiple classification outputs. However, we find that simply extending these 2D models to 3D does not achieve good performance due to poor per-mask classification quality on novel categories. In this paper, we propose the first method to tackle 3D open-vocabulary panoptic segmentation. Our model takes advantage of the fusion between learnable LiDAR features and dense frozen vision CLIP features, using a single classification head to make predictions for both base and novel classes. To further improve the classification performance on novel classes and leverage the CLIP model, we propose two novel loss functions: object-level distillation loss and voxel-level distillation loss. Our experiments on the nuScenes and SemanticKITTI datasets show that our method outperforms strong baselines by a large margin.
Unsupervised 3D Perception with 2D Vision-Language Distillation for Autonomous Driving
Sep 25, 2023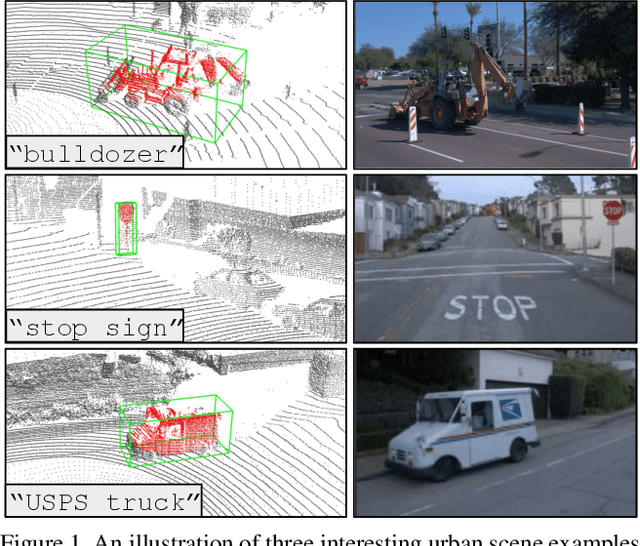
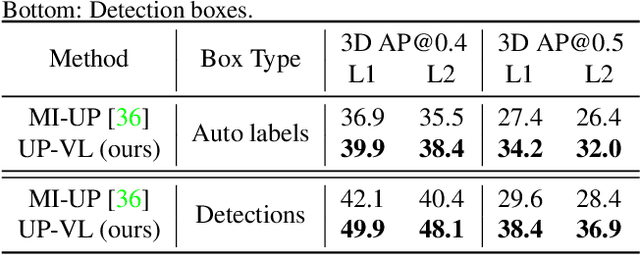
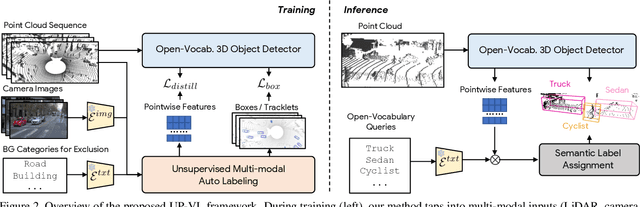
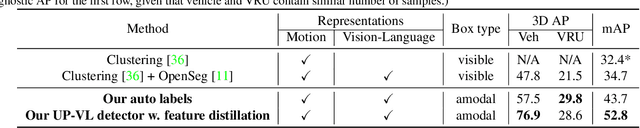
Closed-set 3D perception models trained on only a pre-defined set of object categories can be inadequate for safety critical applications such as autonomous driving where new object types can be encountered after deployment. In this paper, we present a multi-modal auto labeling pipeline capable of generating amodal 3D bounding boxes and tracklets for training models on open-set categories without 3D human labels. Our pipeline exploits motion cues inherent in point cloud sequences in combination with the freely available 2D image-text pairs to identify and track all traffic participants. Compared to the recent studies in this domain, which can only provide class-agnostic auto labels limited to moving objects, our method can handle both static and moving objects in the unsupervised manner and is able to output open-vocabulary semantic labels thanks to the proposed vision-language knowledge distillation. Experiments on the Waymo Open Dataset show that our approach outperforms the prior work by significant margins on various unsupervised 3D perception tasks.
3D Human Keypoints Estimation From Point Clouds in the Wild Without Human Labels
Jun 07, 2023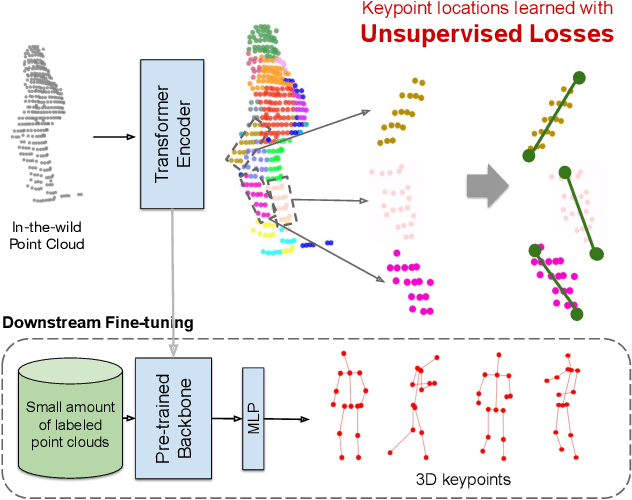
Training a 3D human keypoint detector from point clouds in a supervised manner requires large volumes of high quality labels. While it is relatively easy to capture large amounts of human point clouds, annotating 3D keypoints is expensive, subjective, error prone and especially difficult for long-tail cases (pedestrians with rare poses, scooterists, etc.). In this work, we propose GC-KPL - Geometry Consistency inspired Key Point Leaning, an approach for learning 3D human joint locations from point clouds without human labels. We achieve this by our novel unsupervised loss formulations that account for the structure and movement of the human body. We show that by training on a large training set from Waymo Open Dataset without any human annotated keypoints, we are able to achieve reasonable performance as compared to the fully supervised approach. Further, the backbone benefits from the unsupervised training and is useful in downstream fewshot learning of keypoints, where fine-tuning on only 10 percent of the labeled training data gives comparable performance to fine-tuning on the entire set. We demonstrated that GC-KPL outperforms by a large margin over SoTA when trained on entire dataset and efficiently leverages large volumes of unlabeled data.
MoDAR: Using Motion Forecasting for 3D Object Detection in Point Cloud Sequences
Jun 05, 2023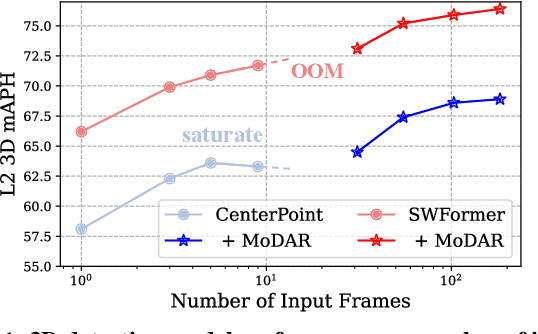
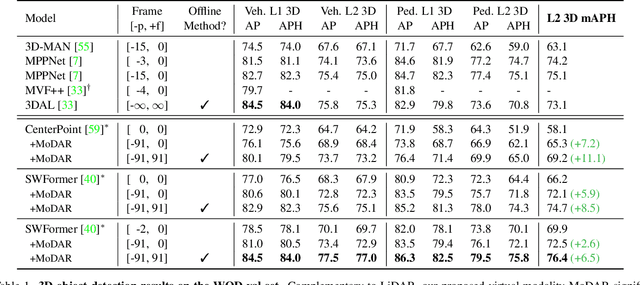
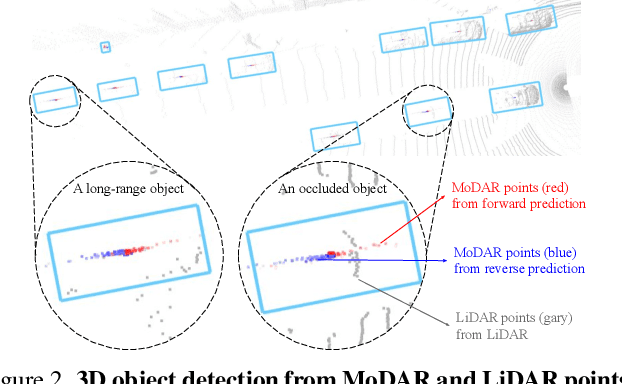
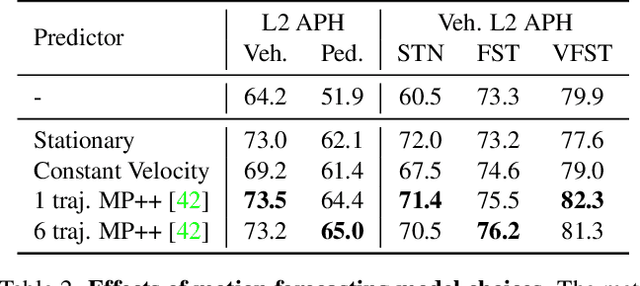
Occluded and long-range objects are ubiquitous and challenging for 3D object detection. Point cloud sequence data provide unique opportunities to improve such cases, as an occluded or distant object can be observed from different viewpoints or gets better visibility over time. However, the efficiency and effectiveness in encoding long-term sequence data can still be improved. In this work, we propose MoDAR, using motion forecasting outputs as a type of virtual modality, to augment LiDAR point clouds. The MoDAR modality propagates object information from temporal contexts to a target frame, represented as a set of virtual points, one for each object from a waypoint on a forecasted trajectory. A fused point cloud of both raw sensor points and the virtual points can then be fed to any off-the-shelf point-cloud based 3D object detector. Evaluated on the Waymo Open Dataset, our method significantly improves prior art detectors by using motion forecasting from extra-long sequences (e.g. 18 seconds), achieving new state of the arts, while not adding much computation overhead.
MotionDiffuser: Controllable Multi-Agent Motion Prediction using Diffusion
Jun 05, 2023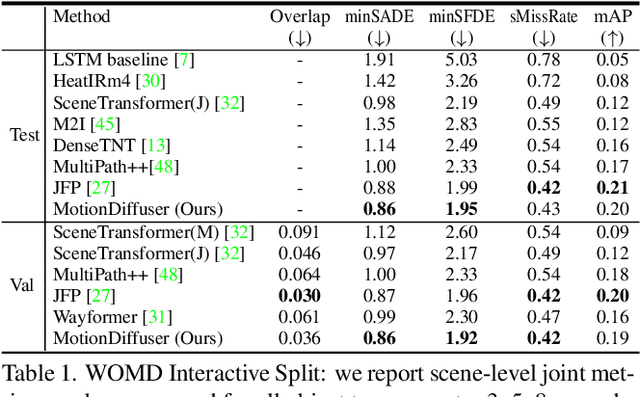
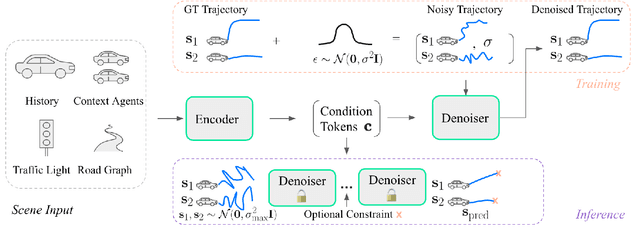
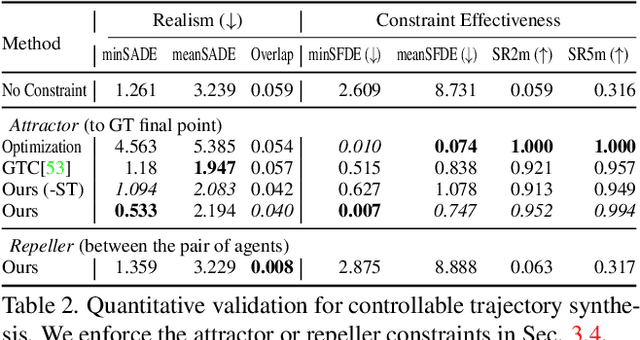
We present MotionDiffuser, a diffusion based representation for the joint distribution of future trajectories over multiple agents. Such representation has several key advantages: first, our model learns a highly multimodal distribution that captures diverse future outcomes. Second, the simple predictor design requires only a single L2 loss training objective, and does not depend on trajectory anchors. Third, our model is capable of learning the joint distribution for the motion of multiple agents in a permutation-invariant manner. Furthermore, we utilize a compressed trajectory representation via PCA, which improves model performance and allows for efficient computation of the exact sample log probability. Subsequently, we propose a general constrained sampling framework that enables controlled trajectory sampling based on differentiable cost functions. This strategy enables a host of applications such as enforcing rules and physical priors, or creating tailored simulation scenarios. MotionDiffuser can be combined with existing backbone architectures to achieve top motion forecasting results. We obtain state-of-the-art results for multi-agent motion prediction on the Waymo Open Motion Dataset.
GINA-3D: Learning to Generate Implicit Neural Assets in the Wild
Apr 04, 2023



Modeling the 3D world from sensor data for simulation is a scalable way of developing testing and validation environments for robotic learning problems such as autonomous driving. However, manually creating or re-creating real-world-like environments is difficult, expensive, and not scalable. Recent generative model techniques have shown promising progress to address such challenges by learning 3D assets using only plentiful 2D images -- but still suffer limitations as they leverage either human-curated image datasets or renderings from manually-created synthetic 3D environments. In this paper, we introduce GINA-3D, a generative model that uses real-world driving data from camera and LiDAR sensors to create realistic 3D implicit neural assets of diverse vehicles and pedestrians. Compared to the existing image datasets, the real-world driving setting poses new challenges due to occlusions, lighting-variations and long-tail distributions. GINA-3D tackles these challenges by decoupling representation learning and generative modeling into two stages with a learned tri-plane latent structure, inspired by recent advances in generative modeling of images. To evaluate our approach, we construct a large-scale object-centric dataset containing over 520K images of vehicles and pedestrians from the Waymo Open Dataset, and a new set of 80K images of long-tail instances such as construction equipment, garbage trucks, and cable cars. We compare our model with existing approaches and demonstrate that it achieves state-of-the-art performance in quality and diversity for both generated images and geometries.
HUM3DIL: Semi-supervised Multi-modal 3D Human Pose Estimation for Autonomous Driving
Dec 15, 2022Autonomous driving is an exciting new industry, posing important research questions. Within the perception module, 3D human pose estimation is an emerging technology, which can enable the autonomous vehicle to perceive and understand the subtle and complex behaviors of pedestrians. While hardware systems and sensors have dramatically improved over the decades -- with cars potentially boasting complex LiDAR and vision systems and with a growing expansion of the available body of dedicated datasets for this newly available information -- not much work has been done to harness these novel signals for the core problem of 3D human pose estimation. Our method, which we coin HUM3DIL (HUMan 3D from Images and LiDAR), efficiently makes use of these complementary signals, in a semi-supervised fashion and outperforms existing methods with a large margin. It is a fast and compact model for onboard deployment. Specifically, we embed LiDAR points into pixel-aligned multi-modal features, which we pass through a sequence of Transformer refinement stages. Quantitative experiments on the Waymo Open Dataset support these claims, where we achieve state-of-the-art results on the task of 3D pose estimation.