 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRethinking generative image pretraining: How far are we from scaling up next-pixel prediction?
Nov 11, 2025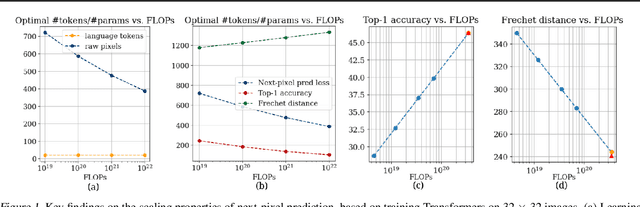
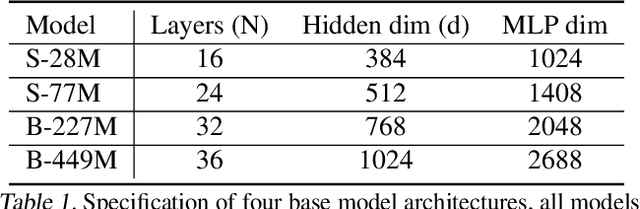

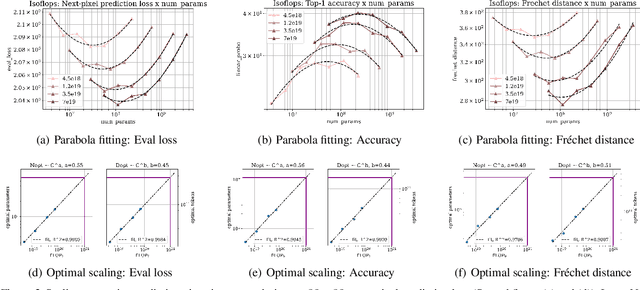
This paper investigates the scaling properties of autoregressive next-pixel prediction, a simple, end-to-end yet under-explored framework for unified vision models. Starting with images at resolutions of 32x32, we train a family of Transformers using IsoFlops profiles across compute budgets up to 7e19 FLOPs and evaluate three distinct target metrics: next-pixel prediction objective, ImageNet classification accuracy, and generation quality measured by Fr'echet Distance. First, optimal scaling strategy is critically task-dependent. At a fixed 32x32 resolution alone, the optimal scaling properties for image classification and image generation diverge, where generation optimal setup requires the data size grow three to five times faster than for the classification optimal setup. Second, as image resolution increases, the optimal scaling strategy indicates that the model size must grow much faster than data size. Surprisingly, by projecting our findings, we discover that the primary bottleneck is compute rather than the amount of training data. As compute continues to grow four to five times annually, we forecast the feasibility of pixel-by-pixel modeling of images within the next five years.
Unsupervised 3D Perception with 2D Vision-Language Distillation for Autonomous Driving
Sep 25, 2023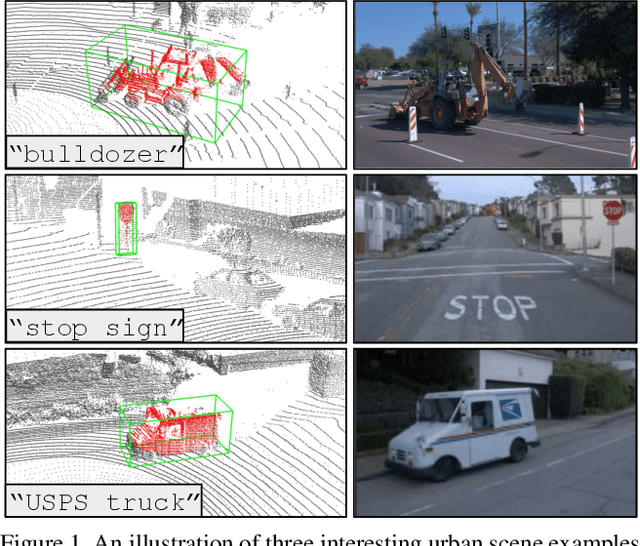
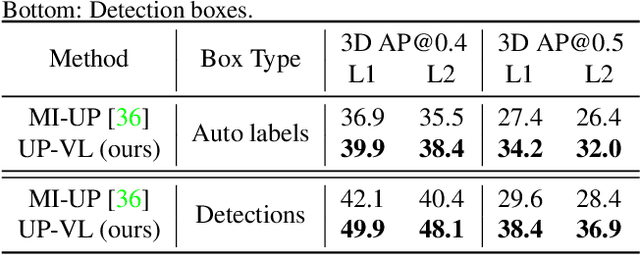
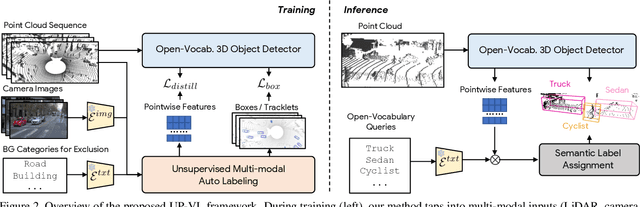
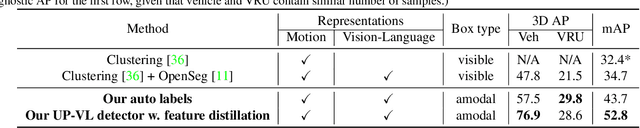
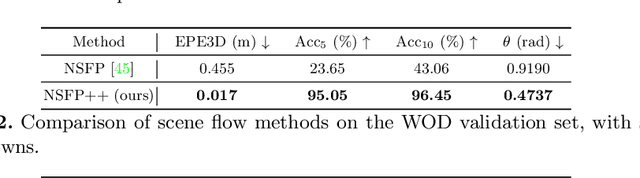
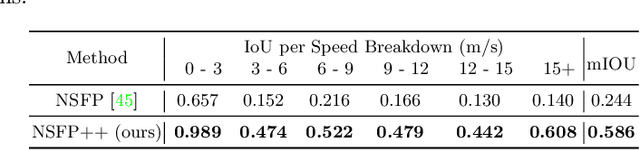
Closed-set 3D perception models trained on only a pre-defined set of object categories can be inadequate for safety critical applications such as autonomous driving where new object types can be encountered after deployment. In this paper, we present a multi-modal auto labeling pipeline capable of generating amodal 3D bounding boxes and tracklets for training models on open-set categories without 3D human labels. Our pipeline exploits motion cues inherent in point cloud sequences in combination with the freely available 2D image-text pairs to identify and track all traffic participants. Compared to the recent studies in this domain, which can only provide class-agnostic auto labels limited to moving objects, our method can handle both static and moving objects in the unsupervised manner and is able to output open-vocabulary semantic labels thanks to the proposed vision-language knowledge distillation. Experiments on the Waymo Open Dataset show that our approach outperforms the prior work by significant margins on various unsupervised 3D perception tasks.
GINA-3D: Learning to Generate Implicit Neural Assets in the Wild
Apr 04, 2023



Modeling the 3D world from sensor data for simulation is a scalable way of developing testing and validation environments for robotic learning problems such as autonomous driving. However, manually creating or re-creating real-world-like environments is difficult, expensive, and not scalable. Recent generative model techniques have shown promising progress to address such challenges by learning 3D assets using only plentiful 2D images -- but still suffer limitations as they leverage either human-curated image datasets or renderings from manually-created synthetic 3D environments. In this paper, we introduce GINA-3D, a generative model that uses real-world driving data from camera and LiDAR sensors to create realistic 3D implicit neural assets of diverse vehicles and pedestrians. Compared to the existing image datasets, the real-world driving setting poses new challenges due to occlusions, lighting-variations and long-tail distributions. GINA-3D tackles these challenges by decoupling representation learning and generative modeling into two stages with a learned tri-plane latent structure, inspired by recent advances in generative modeling of images. To evaluate our approach, we construct a large-scale object-centric dataset containing over 520K images of vehicles and pedestrians from the Waymo Open Dataset, and a new set of 80K images of long-tail instances such as construction equipment, garbage trucks, and cable cars. We compare our model with existing approaches and demonstrate that it achieves state-of-the-art performance in quality and diversity for both generated images and geometries.
NeRDi: Single-View NeRF Synthesis with Language-Guided Diffusion as General Image Priors
Dec 06, 2022



2D-to-3D reconstruction is an ill-posed problem, yet humans are good at solving this problem due to their prior knowledge of the 3D world developed over years. Driven by this observation, we propose NeRDi, a single-view NeRF synthesis framework with general image priors from 2D diffusion models. Formulating single-view reconstruction as an image-conditioned 3D generation problem, we optimize the NeRF representations by minimizing a diffusion loss on its arbitrary view renderings with a pretrained image diffusion model under the input-view constraint. We leverage off-the-shelf vision-language models and introduce a two-section language guidance as conditioning inputs to the diffusion model. This is essentially helpful for improving multiview content coherence as it narrows down the general image prior conditioned on the semantic and visual features of the single-view input image. Additionally, we introduce a geometric loss based on estimated depth maps to regularize the underlying 3D geometry of the NeRF. Experimental results on the DTU MVS dataset show that our method can synthesize novel views with higher quality even compared to existing methods trained on this dataset. We also demonstrate our generalizability in zero-shot NeRF synthesis for in-the-wild images.
Motion Inspired Unsupervised Perception and Prediction in Autonomous Driving
Oct 14, 2022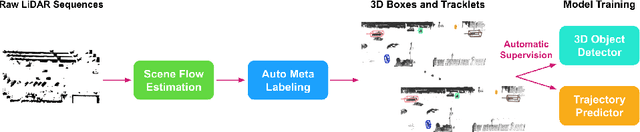

Learning-based perception and prediction modules in modern autonomous driving systems typically rely on expensive human annotation and are designed to perceive only a handful of predefined object categories. This closed-set paradigm is insufficient for the safety-critical autonomous driving task, where the autonomous vehicle needs to process arbitrarily many types of traffic participants and their motion behaviors in a highly dynamic world. To address this difficulty, this paper pioneers a novel and challenging direction, i.e., training perception and prediction models to understand open-set moving objects, with no human supervision. Our proposed framework uses self-learned flow to trigger an automated meta labeling pipeline to achieve automatic supervision. 3D detection experiments on the Waymo Open Dataset show that our method significantly outperforms classical unsupervised approaches and is even competitive to the counterpart with supervised scene flow. We further show that our approach generates highly promising results in open-set 3D detection and trajectory prediction, confirming its potential in closing the safety gap of fully supervised systems.
Waymo Open Dataset: Panoramic Video Panoptic Segmentation
Jun 15, 2022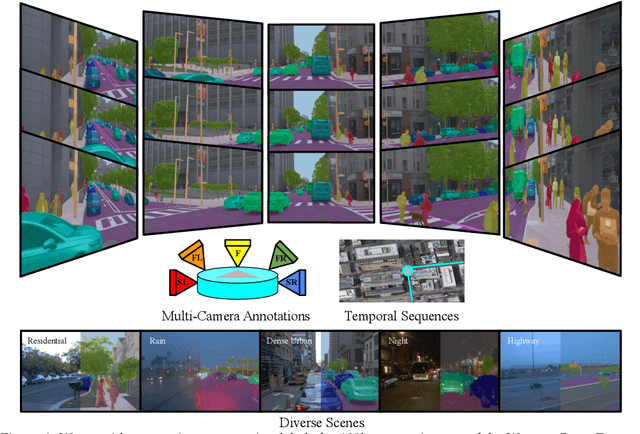
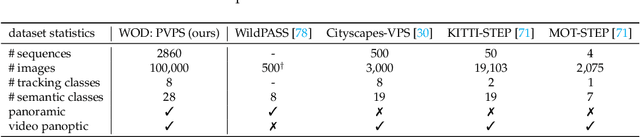
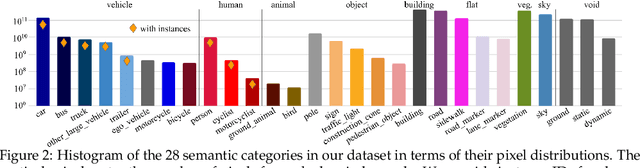
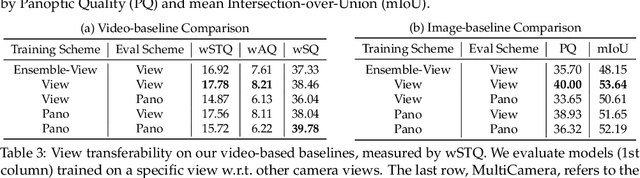
Panoptic image segmentation is the computer vision task of finding groups of pixels in an image and assigning semantic classes and object instance identifiers to them. Research in image segmentation has become increasingly popular due to its critical applications in robotics and autonomous driving. The research community thereby relies on publicly available benchmark dataset to advance the state-of-the-art in computer vision. Due to the high costs of densely labeling the images, however, there is a shortage of publicly available ground truth labels that are suitable for panoptic segmentation. The high labeling costs also make it challenging to extend existing datasets to the video domain and to multi-camera setups. We therefore present the Waymo Open Dataset: Panoramic Video Panoptic Segmentation Dataset, a large-scale dataset that offers high-quality panoptic segmentation labels for autonomous driving. We generate our dataset using the publicly available Waymo Open Dataset, leveraging the diverse set of camera images. Our labels are consistent over time for video processing and consistent across multiple cameras mounted on the vehicles for full panoramic scene understanding. Specifically, we offer labels for 28 semantic categories and 2,860 temporal sequences that were captured by five cameras mounted on autonomous vehicles driving in three different geographical locations, leading to a total of 100k labeled camera images. To the best of our knowledge, this makes our dataset an order of magnitude larger than existing datasets that offer video panoptic segmentation labels. We further propose a new benchmark for Panoramic Video Panoptic Segmentation and establish a number of strong baselines based on the DeepLab family of models. We will make the benchmark and the code publicly available. Find the dataset at https://waymo.com/open.
Block-NeRF: Scalable Large Scene Neural View Synthesis
Feb 10, 2022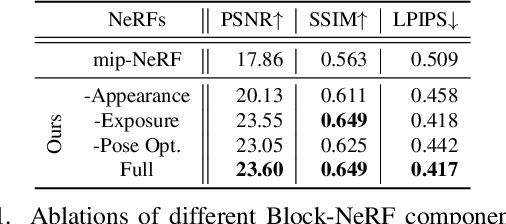



We present Block-NeRF, a variant of Neural Radiance Fields that can represent large-scale environments. Specifically, we demonstrate that when scaling NeRF to render city-scale scenes spanning multiple blocks, it is vital to decompose the scene into individually trained NeRFs. This decomposition decouples rendering time from scene size, enables rendering to scale to arbitrarily large environments, and allows per-block updates of the environment. We adopt several architectural changes to make NeRF robust to data captured over months under different environmental conditions. We add appearance embeddings, learned pose refinement, and controllable exposure to each individual NeRF, and introduce a procedure for aligning appearance between adjacent NeRFs so that they can be seamlessly combined. We build a grid of Block-NeRFs from 2.8 million images to create the largest neural scene representation to date, capable of rendering an entire neighborhood of San Francisco.
Exploring Adversarial Robustness of Multi-Sensor Perception Systems in Self Driving
Jan 26, 2021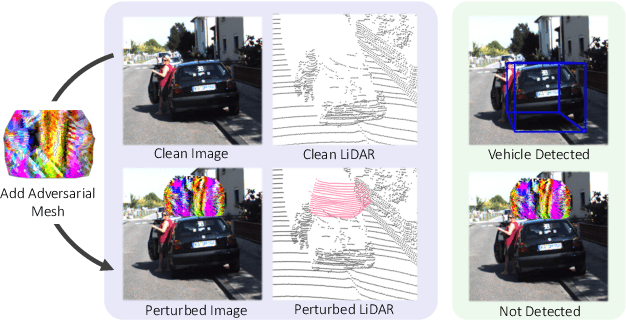
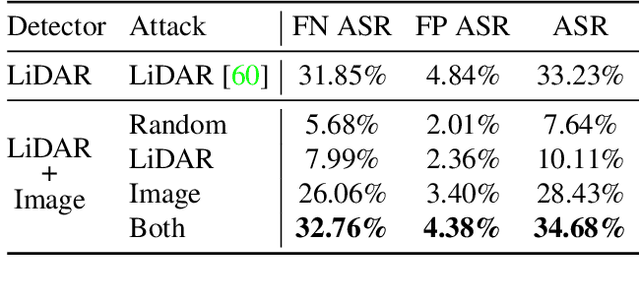
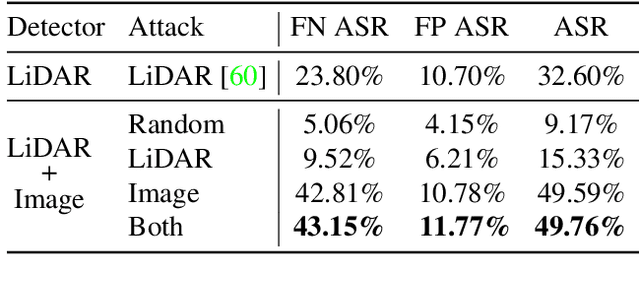
Modern self-driving perception systems have been shown to improve upon processing complementary inputs such as LiDAR with images. In isolation, 2D images have been found to be extremely vulnerable to adversarial attacks. Yet, there have been limited studies on the adversarial robustness of multi-modal models that fuse LiDAR features with image features. Furthermore, existing works do not consider physically realizable perturbations that are consistent across the input modalities. In this paper, we showcase practical susceptibilities of multi-sensor detection by placing an adversarial object on top of a host vehicle. We focus on physically realizable and input-agnostic attacks as they are feasible to execute in practice, and show that a single universal adversary can hide different host vehicles from state-of-the-art multi-modal detectors. Our experiments demonstrate that successful attacks are primarily caused by easily corrupted image features. Furthermore, we find that in modern sensor fusion methods which project image features into 3D, adversarial attacks can exploit the projection process to generate false positives across distant regions in 3D. Towards more robust multi-modal perception systems, we show that adversarial training with feature denoising can boost robustness to such attacks significantly. However, we find that standard adversarial defenses still struggle to prevent false positives which are also caused by inaccurate associations between 3D LiDAR points and 2D pixels.
S3: Neural Shape, Skeleton, and Skinning Fields for 3D Human Modeling
Jan 17, 2021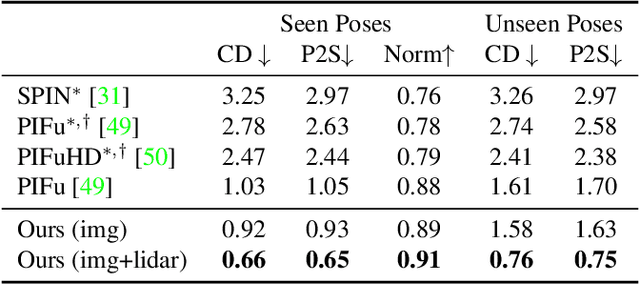
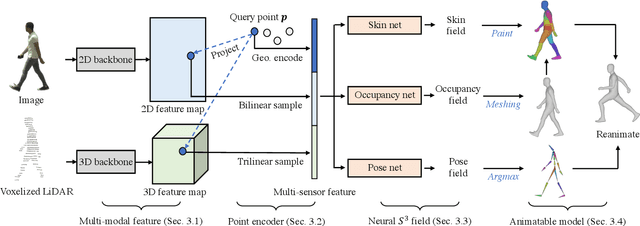
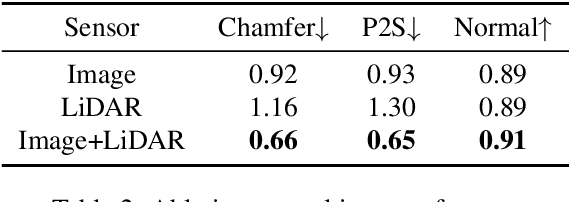
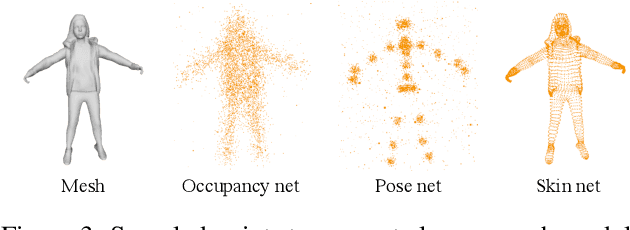
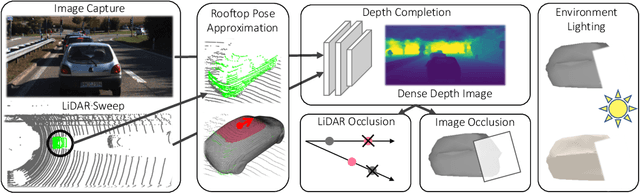
Constructing and animating humans is an important component for building virtual worlds in a wide variety of applications such as virtual reality or robotics testing in simulation. As there are exponentially many variations of humans with different shape, pose and clothing, it is critical to develop methods that can automatically reconstruct and animate humans at scale from real world data. Towards this goal, we represent the pedestrian's shape, pose and skinning weights as neural implicit functions that are directly learned from data. This representation enables us to handle a wide variety of different pedestrian shapes and poses without explicitly fitting a human parametric body model, allowing us to handle a wider range of human geometries and topologies. We demonstrate the effectiveness of our approach on various datasets and show that our reconstructions outperform existing state-of-the-art methods. Furthermore, our re-animation experiments show that we can generate 3D human animations at scale from a single RGB image (and/or an optional LiDAR sweep) as input.
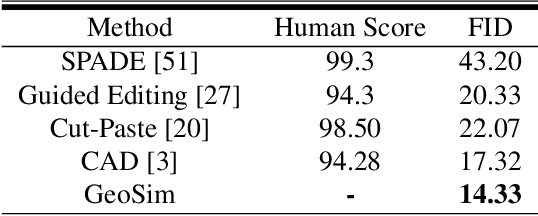
GeoSim: Photorealistic Image Simulation with Geometry-Aware Composition
Jan 16, 2021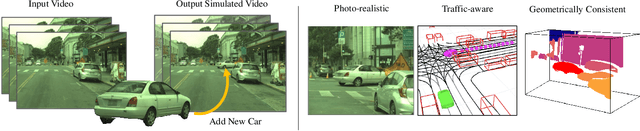
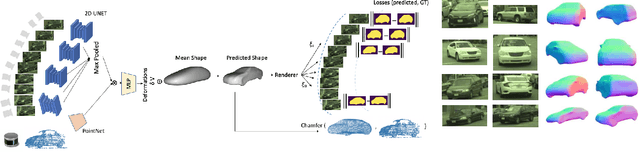
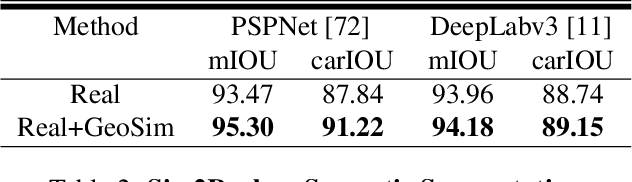
Scalable sensor simulation is an important yet challenging open problem for safety-critical domains such as self-driving. Current work in image simulation either fail to be photorealistic or do not model the 3D environment and the dynamic objects within, losing high-level control and physical realism. In this paper, we present GeoSim, a geometry-aware image composition process that synthesizes novel urban driving scenes by augmenting existing images with dynamic objects extracted from other scenes and rendered at novel poses. Towards this goal, we first build a diverse bank of 3D objects with both realistic geometry and appearance from sensor data. During simulation, we perform a novel geometry-aware simulation-by-composition procedure which 1) proposes plausible and realistic object placements into a given scene, 2) renders novel views of dynamic objects from the asset bank, and 3) composes and blends the rendered image segments. The resulting synthetic images are photorealistic, traffic-aware, and geometrically consistent, allowing image simulation to scale to complex use cases. We demonstrate two such important applications: long-range realistic video simulation across multiple camera sensors, and synthetic data generation for data augmentation on downstream segmentation tasks.