 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeoSim: Photorealistic Image Simulation with Geometry-Aware Composition
Paper and Code
Jan 16, 2021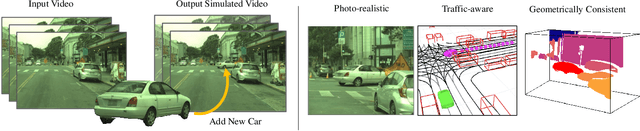
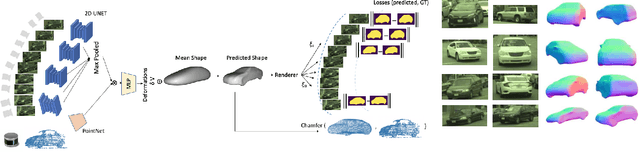
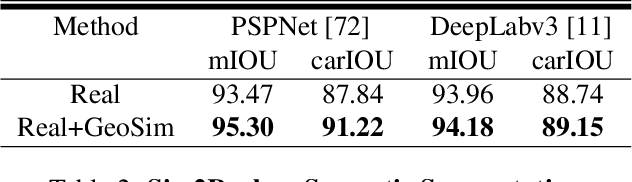
Scalable sensor simulation is an important yet challenging open problem for safety-critical domains such as self-driving. Current work in image simulation either fail to be photorealistic or do not model the 3D environment and the dynamic objects within, losing high-level control and physical realism. In this paper, we present GeoSim, a geometry-aware image composition process that synthesizes novel urban driving scenes by augmenting existing images with dynamic objects extracted from other scenes and rendered at novel poses. Towards this goal, we first build a diverse bank of 3D objects with both realistic geometry and appearance from sensor data. During simulation, we perform a novel geometry-aware simulation-by-composition procedure which 1) proposes plausible and realistic object placements into a given scene, 2) renders novel views of dynamic objects from the asset bank, and 3) composes and blends the rendered image segments. The resulting synthetic images are photorealistic, traffic-aware, and geometrically consistent, allowing image simulation to scale to complex use cases. We demonstrate two such important applications: long-range realistic video simulation across multiple camera sensors, and synthetic data generation for data augmentation on downstream segmentation tasks.