 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty-driven 3D Gaussian Splatting Active Mapping via Anisotropic Visibility Field
May 28, 2026We present Gaussian Splatting Anisotropic Visibility Field (GAVIS), a novel framework for uncertainty quantification and active mapping in 3DGS. Our key insight is that regions unseen from the training views yield unreliable predictions from the 3DGS. To address this, we introduce a principled and efficient method for quantifying the visibility field in 3DGS, defined as the anisotropic visibility of each particle with respect to the training views, and represented using spherical harmonics. The resulting visibility field is integrated into a Bayesian Network-based uncertainty-aware 3DGS rasterizer, enabling real-time (200 FPS) uncertainty quantification for synthesized views. Active mapping is further performed within a maximum information gain framework building on this formulation. Extensive experiments across diverse environments demonstrate that GAVIS consistently and significantly outperforms prior approaches in both accuracy and efficiency. Moreover, beyond standalone use, our method can be applied post-hoc to improve the performance of existing approaches.
Neural Visibility Field for Uncertainty-Driven Active Mapping
Jun 11, 2024This paper presents Neural Visibility Field (NVF), a novel uncertainty quantification method for Neural Radiance Fields (NeRF) applied to active mapping. Our key insight is that regions not visible in the training views lead to inherently unreliable color predictions by NeRF at this region, resulting in increased uncertainty in the synthesized views. To address this, we propose to use Bayesian Networks to composite position-based field uncertainty into ray-based uncertainty in camera observations. Consequently, NVF naturally assigns higher uncertainty to unobserved regions, aiding robots to select the most informative next viewpoints. Extensive evaluations show that NVF excels not only in uncertainty quantification but also in scene reconstruction for active mapping, outperforming existing methods.
Neural Field Dynamics Model for Granular Object Piles Manipulation
Nov 01, 2023We present a learning-based dynamics model for granular material manipulation. Inspired by the Eulerian approach commonly used in fluid dynamics, our method adopts a fully convolutional neural network that operates on a density field-based representation of object piles and pushers, allowing it to exploit the spatial locality of inter-object interactions as well as the translation equivariance through convolution operations. Furthermore, our differentiable action rendering module makes the model fully differentiable and can be directly integrated with a gradient-based trajectory optimization algorithm. We evaluate our model with a wide array of piles manipulation tasks both in simulation and real-world experiments and demonstrate that it significantly exceeds existing latent or particle-based methods in both accuracy and computation efficiency, and exhibits zero-shot generalization capabilities across various environments and tasks.
Tetris-inspired detector with neural network for radiation mapping
Feb 07, 2023In recent years, radiation mapping has attracted widespread research attention and increased public concerns on environmental monitoring. In terms of both materials and their configurations, radiation detectors have been developed to locate the directions and positions of the radiation sources. In this process, algorithm is essential in converting detector signals to radiation source information. However, due to the complex mechanisms of radiation-matter interaction and the current limitation of data collection, high-performance, low-cost radiation mapping is still challenging. Here we present a computational framework using Tetris-inspired detector pixels and machine learning for radiation mapping. Using inter-pixel padding to increase the contrast between pixels and neural network to analyze the detector readings, a detector with as few as four pixels can achieve high-resolution directional mapping. By further imposing Maximum a Posteriori (MAP) with a moving detector, further radiation position localization is achieved. Non-square, Tetris-shaped detector can further improve performance beyond the conventional grid-shaped detector. Our framework offers a new avenue for high quality radiation mapping with least number of detector pixels possible, and is anticipated to be capable to deploy for real-world radiation detection with moderate validation.
GeoSim: Photorealistic Image Simulation with Geometry-Aware Composition
Jan 16, 2021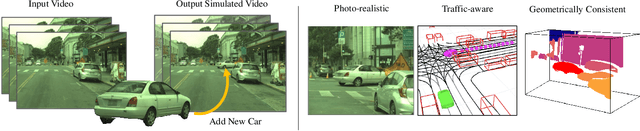
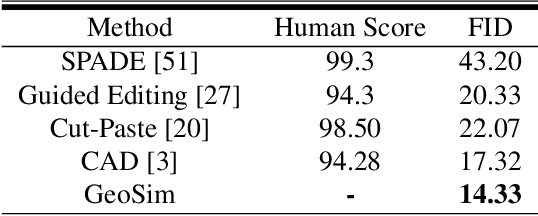
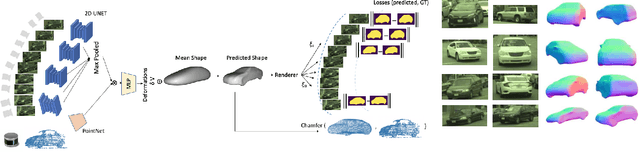
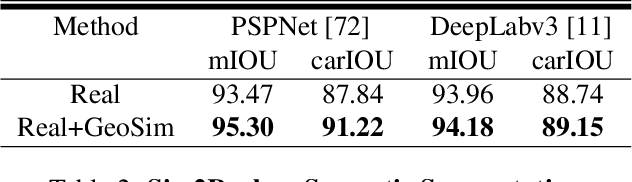
Scalable sensor simulation is an important yet challenging open problem for safety-critical domains such as self-driving. Current work in image simulation either fail to be photorealistic or do not model the 3D environment and the dynamic objects within, losing high-level control and physical realism. In this paper, we present GeoSim, a geometry-aware image composition process that synthesizes novel urban driving scenes by augmenting existing images with dynamic objects extracted from other scenes and rendered at novel poses. Towards this goal, we first build a diverse bank of 3D objects with both realistic geometry and appearance from sensor data. During simulation, we perform a novel geometry-aware simulation-by-composition procedure which 1) proposes plausible and realistic object placements into a given scene, 2) renders novel views of dynamic objects from the asset bank, and 3) composes and blends the rendered image segments. The resulting synthetic images are photorealistic, traffic-aware, and geometrically consistent, allowing image simulation to scale to complex use cases. We demonstrate two such important applications: long-range realistic video simulation across multiple camera sensors, and synthetic data generation for data augmentation on downstream segmentation tasks.