 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeS4-Driver: Scalable Self-Supervised Driving Multimodal Large Language Modelwith Spatio-Temporal Visual Representation
May 30, 2025

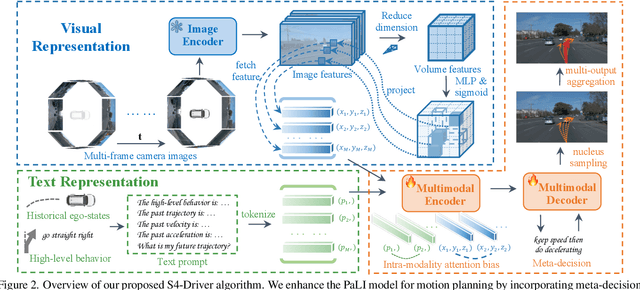

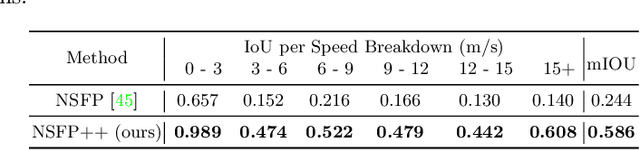
The latest advancements in multi-modal large language models (MLLMs) have spurred a strong renewed interest in end-to-end motion planning approaches for autonomous driving. Many end-to-end approaches rely on human annotations to learn intermediate perception and prediction tasks, while purely self-supervised approaches--which directly learn from sensor inputs to generate planning trajectories without human annotations often underperform the state of the art. We observe a key gap in the input representation space: end-to-end approaches built on MLLMs are often pretrained with reasoning tasks in 2D image space rather than the native 3D space in which autonomous vehicles plan. To this end, we propose S4-Driver, a scalable self-supervised motion planning algorithm with spatio-temporal visual representation, based on the popular PaLI multimodal large language model. S4-Driver uses a novel sparse volume strategy to seamlessly transform the strong visual representation of MLLMs from perspective view to 3D space without the need to finetune the vision encoder. This representation aggregates multi-view and multi-frame visual inputs and enables better prediction of planning trajectories in 3D space. To validate our method, we run experiments on both nuScenes and Waymo Open Motion Dataset (with in-house camera data). Results show that S4-Driver performs favorably against existing supervised multi-task approaches while requiring no human annotations. It also demonstrates great scalability when pretrained on large volumes of unannotated driving logs.
EMMA: End-to-End Multimodal Model for Autonomous Driving
Oct 30, 2024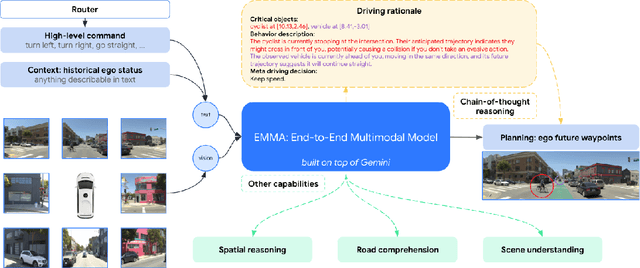
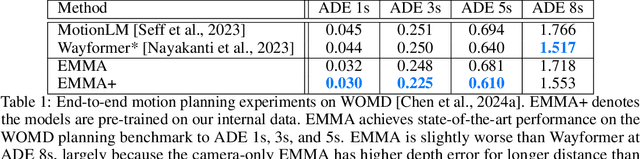
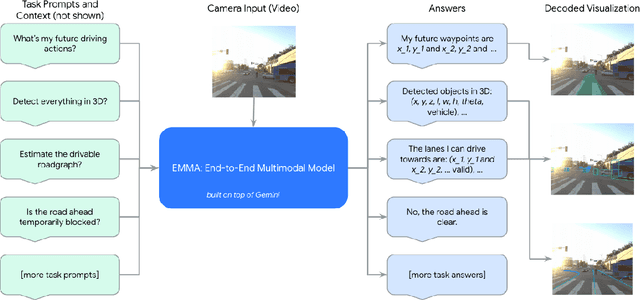
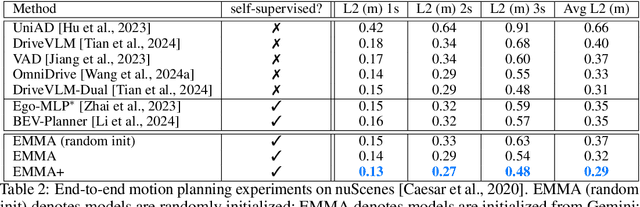
We introduce EMMA, an End-to-end Multimodal Model for Autonomous driving. Built on a multi-modal large language model foundation, EMMA directly maps raw camera sensor data into various driving-specific outputs, including planner trajectories, perception objects, and road graph elements. EMMA maximizes the utility of world knowledge from the pre-trained large language models, by representing all non-sensor inputs (e.g. navigation instructions and ego vehicle status) and outputs (e.g. trajectories and 3D locations) as natural language text. This approach allows EMMA to jointly process various driving tasks in a unified language space, and generate the outputs for each task using task-specific prompts. Empirically, we demonstrate EMMA's effectiveness by achieving state-of-the-art performance in motion planning on nuScenes as well as competitive results on the Waymo Open Motion Dataset (WOMD). EMMA also yields competitive results for camera-primary 3D object detection on the Waymo Open Dataset (WOD). We show that co-training EMMA with planner trajectories, object detection, and road graph tasks yields improvements across all three domains, highlighting EMMA's potential as a generalist model for autonomous driving applications. However, EMMA also exhibits certain limitations: it can process only a small amount of image frames, does not incorporate accurate 3D sensing modalities like LiDAR or radar and is computationally expensive. We hope that our results will inspire further research to mitigate these issues and to further evolve the state of the art in autonomous driving model architectures.
Multi-Task Dynamic Pricing in Credit Market with Contextual Information
Oct 18, 2024



We study the dynamic pricing problem faced by a broker that buys and sells a large number of financial securities in the credit market, such as corporate bonds, government bonds, loans, and other credit-related securities. One challenge in pricing these securities is their infrequent trading, which leads to insufficient data for individual pricing. However, many of these securities share structural features that can be utilized. Building on this, we propose a multi-task dynamic pricing framework that leverages these shared structures across securities, enhancing pricing accuracy through learning. In our framework, a security is fully characterized by a $d$ dimensional contextual/feature vector. The customer will buy (sell) the security from the broker if the broker quotes a price lower (higher) than that of the competitors. We assume a linear contextual model for the competitor's pricing, with unknown parameters a prior. The parameters for pricing different securities may or may not be similar to each other. The firm's objective is to minimize the expected regret, namely, the expected revenue loss against a clairvoyant policy which has the knowledge of the parameters of the competitor's pricing model. We show that the regret of our policy is better than both a policy that treats each security individually and a policy that treats all securities as the same. Moreover, the regret is bounded by $\tilde{O} ( \delta_{\max} \sqrt{T M d} + M d ) $, where $M$ is the number of securities and $\delta_{\max}$ characterizes the overall dissimilarity across securities in the basket.
MoST: Multi-modality Scene Tokenization for Motion Prediction
Apr 30, 2024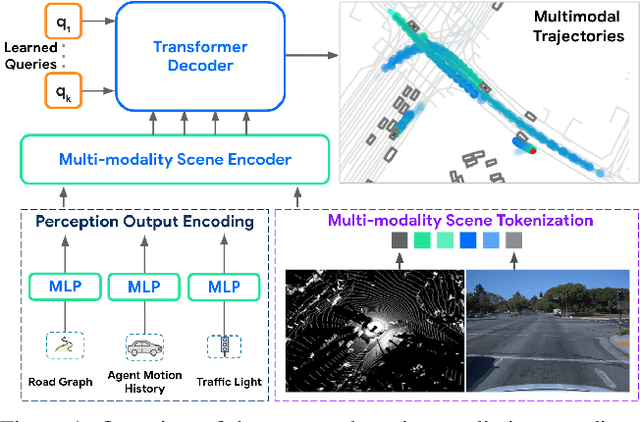
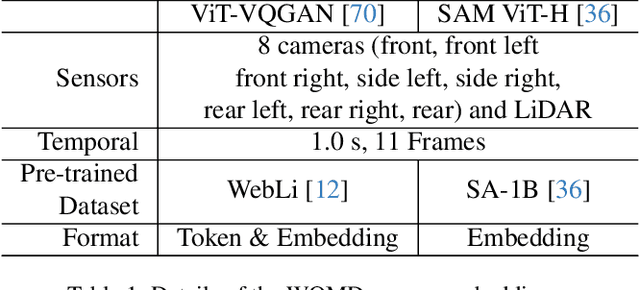
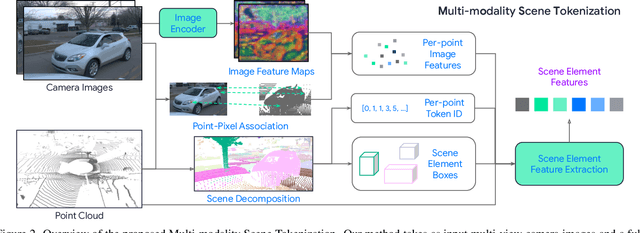
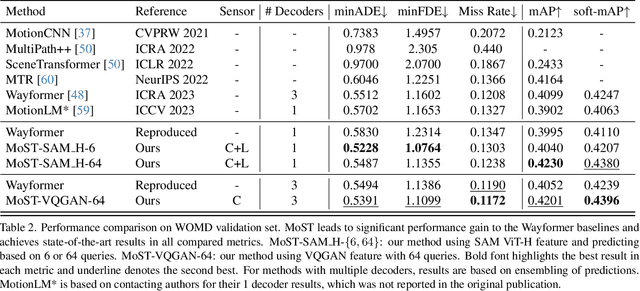
Many existing motion prediction approaches rely on symbolic perception outputs to generate agent trajectories, such as bounding boxes, road graph information and traffic lights. This symbolic representation is a high-level abstraction of the real world, which may render the motion prediction model vulnerable to perception errors (e.g., failures in detecting open-vocabulary obstacles) while missing salient information from the scene context (e.g., poor road conditions). An alternative paradigm is end-to-end learning from raw sensors. However, this approach suffers from the lack of interpretability and requires significantly more training resources. In this work, we propose tokenizing the visual world into a compact set of scene elements and then leveraging pre-trained image foundation models and LiDAR neural networks to encode all the scene elements in an open-vocabulary manner. The image foundation model enables our scene tokens to encode the general knowledge of the open world while the LiDAR neural network encodes geometry information. Our proposed representation can efficiently encode the multi-frame multi-modality observations with a few hundred tokens and is compatible with most transformer-based architectures. To evaluate our method, we have augmented Waymo Open Motion Dataset with camera embeddings. Experiments over Waymo Open Motion Dataset show that our approach leads to significant performance improvements over the state-of-the-art.
3D Open-Vocabulary Panoptic Segmentation with 2D-3D Vision-Language Distillation
Jan 04, 2024



3D panoptic segmentation is a challenging perception task, which aims to predict both semantic and instance annotations for 3D points in a scene. Although prior 3D panoptic segmentation approaches have achieved great performance on closed-set benchmarks, generalizing to novel categories remains an open problem. For unseen object categories, 2D open-vocabulary segmentation has achieved promising results that solely rely on frozen CLIP backbones and ensembling multiple classification outputs. However, we find that simply extending these 2D models to 3D does not achieve good performance due to poor per-mask classification quality on novel categories. In this paper, we propose the first method to tackle 3D open-vocabulary panoptic segmentation. Our model takes advantage of the fusion between learnable LiDAR features and dense frozen vision CLIP features, using a single classification head to make predictions for both base and novel classes. To further improve the classification performance on novel classes and leverage the CLIP model, we propose two novel loss functions: object-level distillation loss and voxel-level distillation loss. Our experiments on the nuScenes and SemanticKITTI datasets show that our method outperforms strong baselines by a large margin.
Unsupervised 3D Perception with 2D Vision-Language Distillation for Autonomous Driving
Sep 25, 2023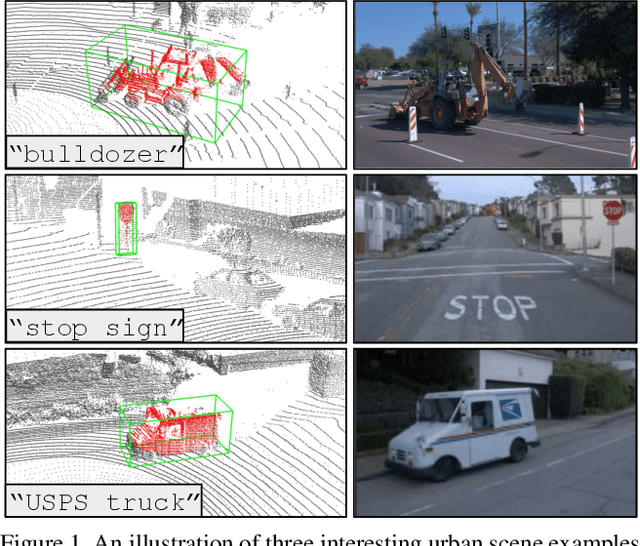
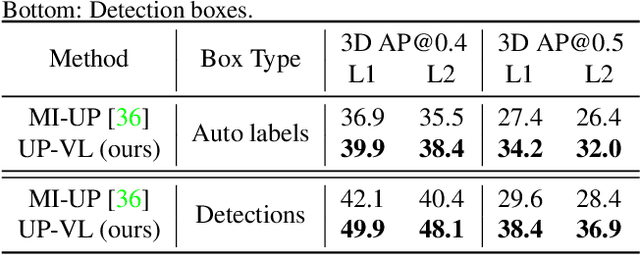
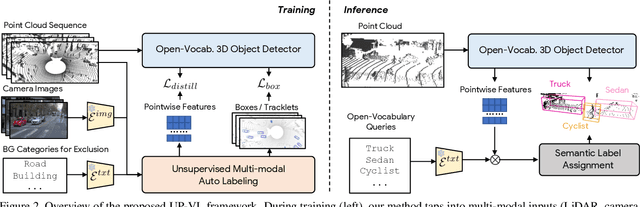
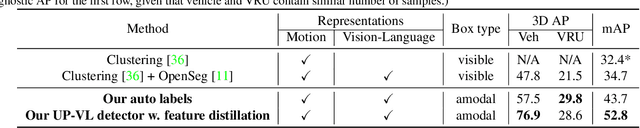
Closed-set 3D perception models trained on only a pre-defined set of object categories can be inadequate for safety critical applications such as autonomous driving where new object types can be encountered after deployment. In this paper, we present a multi-modal auto labeling pipeline capable of generating amodal 3D bounding boxes and tracklets for training models on open-set categories without 3D human labels. Our pipeline exploits motion cues inherent in point cloud sequences in combination with the freely available 2D image-text pairs to identify and track all traffic participants. Compared to the recent studies in this domain, which can only provide class-agnostic auto labels limited to moving objects, our method can handle both static and moving objects in the unsupervised manner and is able to output open-vocabulary semantic labels thanks to the proposed vision-language knowledge distillation. Experiments on the Waymo Open Dataset show that our approach outperforms the prior work by significant margins on various unsupervised 3D perception tasks.
3D Human Keypoints Estimation From Point Clouds in the Wild Without Human Labels
Jun 07, 2023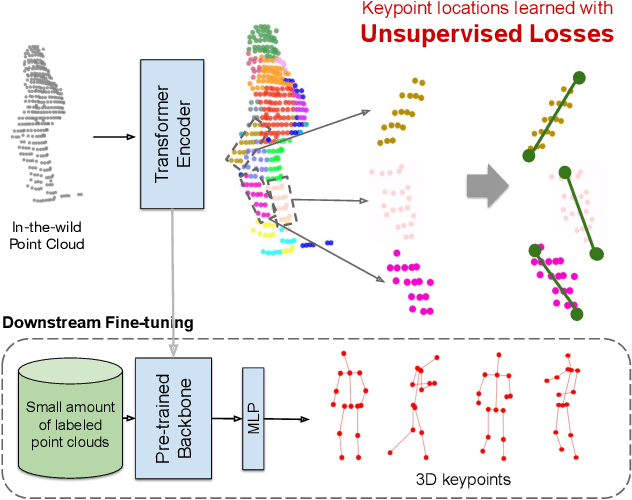
Training a 3D human keypoint detector from point clouds in a supervised manner requires large volumes of high quality labels. While it is relatively easy to capture large amounts of human point clouds, annotating 3D keypoints is expensive, subjective, error prone and especially difficult for long-tail cases (pedestrians with rare poses, scooterists, etc.). In this work, we propose GC-KPL - Geometry Consistency inspired Key Point Leaning, an approach for learning 3D human joint locations from point clouds without human labels. We achieve this by our novel unsupervised loss formulations that account for the structure and movement of the human body. We show that by training on a large training set from Waymo Open Dataset without any human annotated keypoints, we are able to achieve reasonable performance as compared to the fully supervised approach. Further, the backbone benefits from the unsupervised training and is useful in downstream fewshot learning of keypoints, where fine-tuning on only 10 percent of the labeled training data gives comparable performance to fine-tuning on the entire set. We demonstrated that GC-KPL outperforms by a large margin over SoTA when trained on entire dataset and efficiently leverages large volumes of unlabeled data.
HUM3DIL: Semi-supervised Multi-modal 3D Human Pose Estimation for Autonomous Driving
Dec 15, 2022Autonomous driving is an exciting new industry, posing important research questions. Within the perception module, 3D human pose estimation is an emerging technology, which can enable the autonomous vehicle to perceive and understand the subtle and complex behaviors of pedestrians. While hardware systems and sensors have dramatically improved over the decades -- with cars potentially boasting complex LiDAR and vision systems and with a growing expansion of the available body of dedicated datasets for this newly available information -- not much work has been done to harness these novel signals for the core problem of 3D human pose estimation. Our method, which we coin HUM3DIL (HUMan 3D from Images and LiDAR), efficiently makes use of these complementary signals, in a semi-supervised fashion and outperforms existing methods with a large margin. It is a fast and compact model for onboard deployment. Specifically, we embed LiDAR points into pixel-aligned multi-modal features, which we pass through a sequence of Transformer refinement stages. Quantitative experiments on the Waymo Open Dataset support these claims, where we achieve state-of-the-art results on the task of 3D pose estimation.
Motion Inspired Unsupervised Perception and Prediction in Autonomous Driving
Oct 14, 2022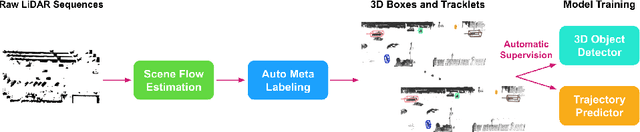
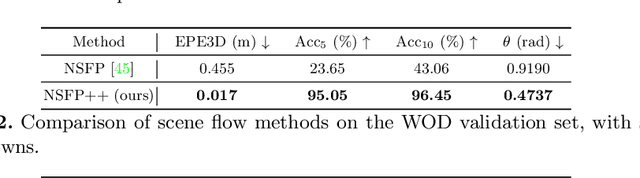

Learning-based perception and prediction modules in modern autonomous driving systems typically rely on expensive human annotation and are designed to perceive only a handful of predefined object categories. This closed-set paradigm is insufficient for the safety-critical autonomous driving task, where the autonomous vehicle needs to process arbitrarily many types of traffic participants and their motion behaviors in a highly dynamic world. To address this difficulty, this paper pioneers a novel and challenging direction, i.e., training perception and prediction models to understand open-set moving objects, with no human supervision. Our proposed framework uses self-learned flow to trigger an automated meta labeling pipeline to achieve automatic supervision. 3D detection experiments on the Waymo Open Dataset show that our method significantly outperforms classical unsupervised approaches and is even competitive to the counterpart with supervised scene flow. We further show that our approach generates highly promising results in open-set 3D detection and trajectory prediction, confirming its potential in closing the safety gap of fully supervised systems.
Risk-Aware Linear Bandits: Theory and Applications in Smart Order Routing
Aug 04, 2022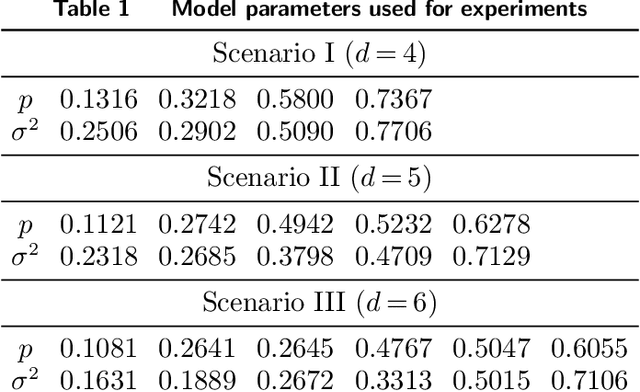
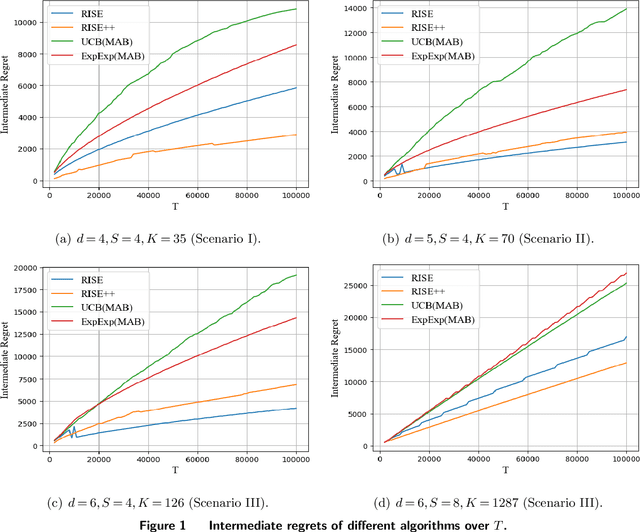
Motivated by practical considerations in machine learning for financial decision-making, such as risk-aversion and large action space, we initiate the study of risk-aware linear bandits. Specifically, we consider regret minimization under the mean-variance measure when facing a set of actions whose rewards can be expressed as linear functions of (initially) unknown parameters. Driven by the variance-minimizing G-optimal design, we propose the Risk-Aware Explore-then-Commit (RISE) algorithm and the Risk-Aware Successive Elimination (RISE++) algorithm. Then, we rigorously analyze their regret upper bounds to show that, by leveraging the linear structure, the algorithms can dramatically reduce the regret when compared to existing methods. Finally, we demonstrate the performance of the algorithms by conducting extensive numerical experiments in a synthetic smart order routing setup. Our results show that both RISE and RISE++ can outperform the competing methods, especially in complex decision-making scenarios.