 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWOD-E2E: Waymo Open Dataset for End-to-End Driving in Challenging Long-tail Scenarios
Oct 30, 2025Vision-based end-to-end (E2E) driving has garnered significant interest in the research community due to its scalability and synergy with multimodal large language models (MLLMs). However, current E2E driving benchmarks primarily feature nominal scenarios, failing to adequately test the true potential of these systems. Furthermore, existing open-loop evaluation metrics often fall short in capturing the multi-modal nature of driving or effectively evaluating performance in long-tail scenarios. To address these gaps, we introduce the Waymo Open Dataset for End-to-End Driving (WOD-E2E). WOD-E2E contains 4,021 driving segments (approximately 12 hours), specifically curated for challenging long-tail scenarios that that are rare in daily life with an occurring frequency of less than 0.03%. Concretely, each segment in WOD-E2E includes the high-level routing information, ego states, and 360-degree camera views from 8 surrounding cameras. To evaluate the E2E driving performance on these long-tail situations, we propose a novel open-loop evaluation metric: Rater Feedback Score (RFS). Unlike conventional metrics that measure the distance between predicted way points and the logs, RFS measures how closely the predicted trajectory matches rater-annotated trajectory preference labels. We have released rater preference labels for all WOD-E2E validation set segments, while the held out test set labels have been used for the 2025 WOD-E2E Challenge. Through our work, we aim to foster state of the art research into generalizable, robust, and safe end-to-end autonomous driving agents capable of handling complex real-world situations.
S4-Driver: Scalable Self-Supervised Driving Multimodal Large Language Modelwith Spatio-Temporal Visual Representation
May 30, 2025

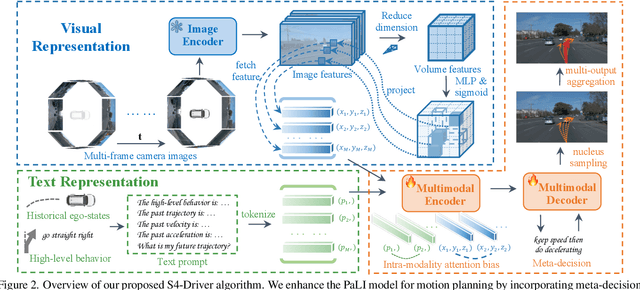

The latest advancements in multi-modal large language models (MLLMs) have spurred a strong renewed interest in end-to-end motion planning approaches for autonomous driving. Many end-to-end approaches rely on human annotations to learn intermediate perception and prediction tasks, while purely self-supervised approaches--which directly learn from sensor inputs to generate planning trajectories without human annotations often underperform the state of the art. We observe a key gap in the input representation space: end-to-end approaches built on MLLMs are often pretrained with reasoning tasks in 2D image space rather than the native 3D space in which autonomous vehicles plan. To this end, we propose S4-Driver, a scalable self-supervised motion planning algorithm with spatio-temporal visual representation, based on the popular PaLI multimodal large language model. S4-Driver uses a novel sparse volume strategy to seamlessly transform the strong visual representation of MLLMs from perspective view to 3D space without the need to finetune the vision encoder. This representation aggregates multi-view and multi-frame visual inputs and enables better prediction of planning trajectories in 3D space. To validate our method, we run experiments on both nuScenes and Waymo Open Motion Dataset (with in-house camera data). Results show that S4-Driver performs favorably against existing supervised multi-task approaches while requiring no human annotations. It also demonstrates great scalability when pretrained on large volumes of unannotated driving logs.
EMMA: End-to-End Multimodal Model for Autonomous Driving
Oct 30, 2024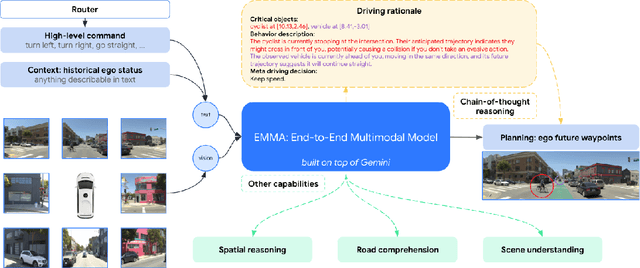
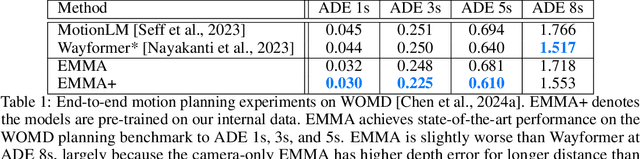
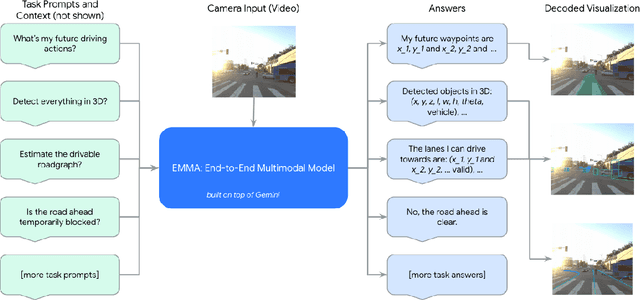
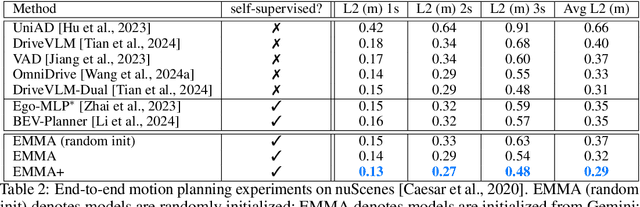
We introduce EMMA, an End-to-end Multimodal Model for Autonomous driving. Built on a multi-modal large language model foundation, EMMA directly maps raw camera sensor data into various driving-specific outputs, including planner trajectories, perception objects, and road graph elements. EMMA maximizes the utility of world knowledge from the pre-trained large language models, by representing all non-sensor inputs (e.g. navigation instructions and ego vehicle status) and outputs (e.g. trajectories and 3D locations) as natural language text. This approach allows EMMA to jointly process various driving tasks in a unified language space, and generate the outputs for each task using task-specific prompts. Empirically, we demonstrate EMMA's effectiveness by achieving state-of-the-art performance in motion planning on nuScenes as well as competitive results on the Waymo Open Motion Dataset (WOMD). EMMA also yields competitive results for camera-primary 3D object detection on the Waymo Open Dataset (WOD). We show that co-training EMMA with planner trajectories, object detection, and road graph tasks yields improvements across all three domains, highlighting EMMA's potential as a generalist model for autonomous driving applications. However, EMMA also exhibits certain limitations: it can process only a small amount of image frames, does not incorporate accurate 3D sensing modalities like LiDAR or radar and is computationally expensive. We hope that our results will inspire further research to mitigate these issues and to further evolve the state of the art in autonomous driving model architectures.
CramNet: Camera-Radar Fusion with Ray-Constrained Cross-Attention for Robust 3D Object Detection
Oct 18, 2022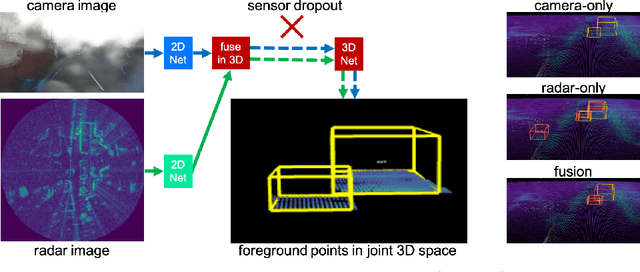

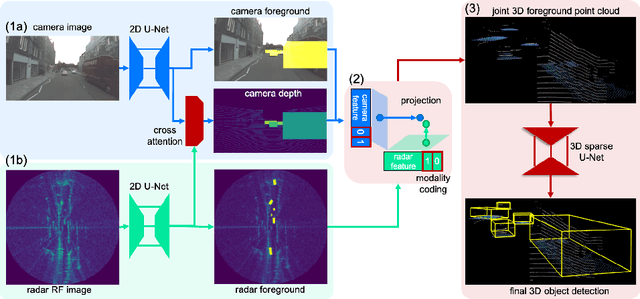

Robust 3D object detection is critical for safe autonomous driving. Camera and radar sensors are synergistic as they capture complementary information and work well under different environmental conditions. Fusing camera and radar data is challenging, however, as each of the sensors lacks information along a perpendicular axis, that is, depth is unknown to camera and elevation is unknown to radar. We propose the camera-radar matching network CramNet, an efficient approach to fuse the sensor readings from camera and radar in a joint 3D space. To leverage radar range measurements for better camera depth predictions, we propose a novel ray-constrained cross-attention mechanism that resolves the ambiguity in the geometric correspondences between camera features and radar features. Our method supports training with sensor modality dropout, which leads to robust 3D object detection, even when a camera or radar sensor suddenly malfunctions on a vehicle. We demonstrate the effectiveness of our fusion approach through extensive experiments on the RADIATE dataset, one of the few large-scale datasets that provide radar radio frequency imagery. A camera-only variant of our method achieves competitive performance in monocular 3D object detection on the Waymo Open Dataset.
CAST: Concurrent Recognition and Segmentation with Adaptive Segment Tokens
Oct 04, 2022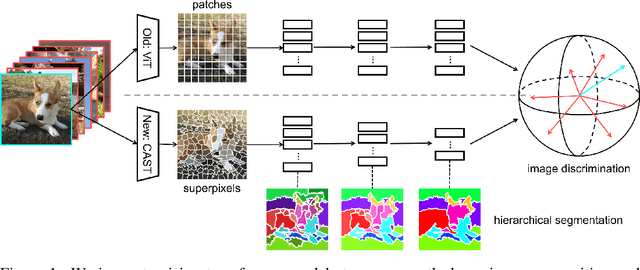
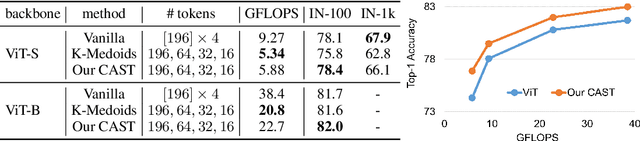
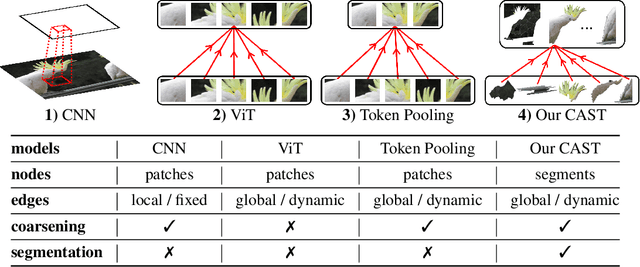

Recognizing an image and segmenting it into coherent regions are often treated as separate tasks. Human vision, however, has a general sense of segmentation hierarchy before recognition occurs. We are thus inspired to learn image recognition with hierarchical image segmentation based entirely on unlabeled images. Our insight is to learn fine-to-coarse features concurrently at superpixels, segments, and full image levels, enforcing consistency and goodness of feature induced segmentations while maximizing discrimination among image instances. Our model innovates vision transformers on three aspects. 1) We use adaptive segment tokens instead of fixed-shape patch tokens. 2) We create a token hierarchy by inserting graph pooling between transformer blocks, naturally producing consistent multi-scale segmentations while increasing the segment size and reducing the number of tokens. 3) We produce hierarchical image segmentation for free while training for recognition by maximizing image-wise discrimination. Our work delivers the first concurrent recognition and hierarchical segmentation model without any supervision. Validated on ImageNet and PASCAL VOC, it achieves better recognition and segmentation with higher computational efficiency.
LET-3D-AP: Longitudinal Error Tolerant 3D Average Precision for Camera-Only 3D Detection
Jun 15, 2022



The popular object detection metric 3D Average Precision (3D AP) relies on the intersection over union between predicted bounding boxes and ground truth bounding boxes. However, depth estimation based on cameras has limited accuracy, which may cause otherwise reasonable predictions that suffer from such longitudinal localization errors to be treated as false positives and false negatives. We therefore propose variants of the popular 3D AP metric that are designed to be more permissive with respect to depth estimation errors. Specifically, our novel longitudinal error tolerant metrics, LET-3D-AP and LET-3D-APL, allow longitudinal localization errors of the predicted bounding boxes up to a given tolerance. The proposed metrics have been used in the Waymo Open Dataset 3D Camera-Only Detection Challenge. We believe that they will facilitate advances in the field of camera-only 3D detection by providing more informative performance signals.
Unsupervised Hierarchical Semantic Segmentation with Multiview Cosegmentation and Clustering Transformers
Apr 25, 2022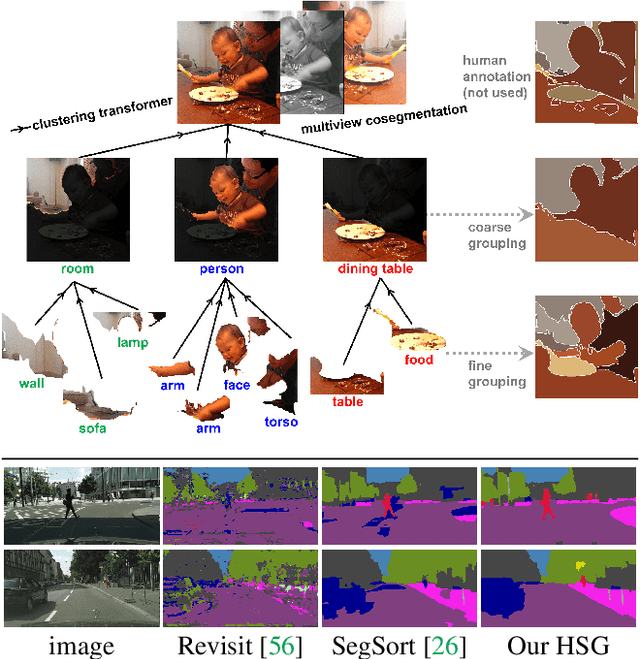
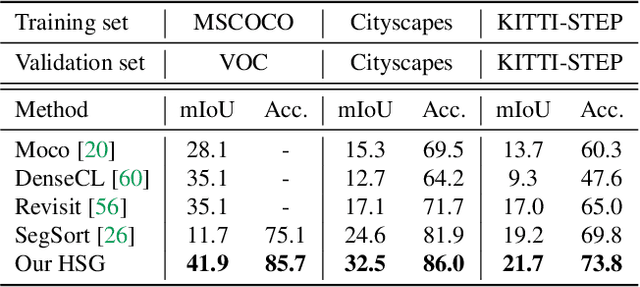

Unsupervised semantic segmentation aims to discover groupings within and across images that capture object and view-invariance of a category without external supervision. Grouping naturally has levels of granularity, creating ambiguity in unsupervised segmentation. Existing methods avoid this ambiguity and treat it as a factor outside modeling, whereas we embrace it and desire hierarchical grouping consistency for unsupervised segmentation. We approach unsupervised segmentation as a pixel-wise feature learning problem. Our idea is that a good representation shall reveal not just a particular level of grouping, but any level of grouping in a consistent and predictable manner. We enforce spatial consistency of grouping and bootstrap feature learning with co-segmentation among multiple views of the same image, and enforce semantic consistency across the grouping hierarchy with clustering transformers between coarse- and fine-grained features. We deliver the first data-driven unsupervised hierarchical semantic segmentation method called Hierarchical Segment Grouping (HSG). Capturing visual similarity and statistical co-occurrences, HSG also outperforms existing unsupervised segmentation methods by a large margin on five major object- and scene-centric benchmarks. Our code is publicly available at https://github.com/twke18/HSG .
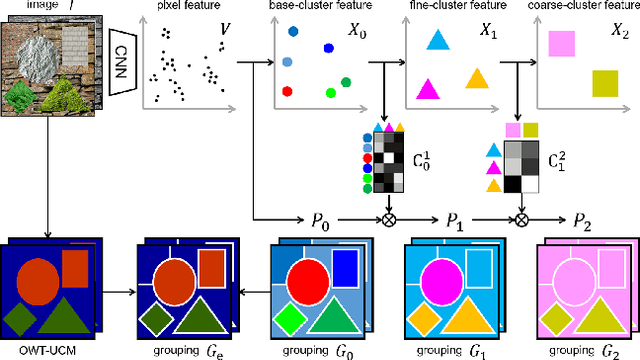
Universal Weakly Supervised Segmentation by Pixel-to-Segment Contrastive Learning
May 11, 2021
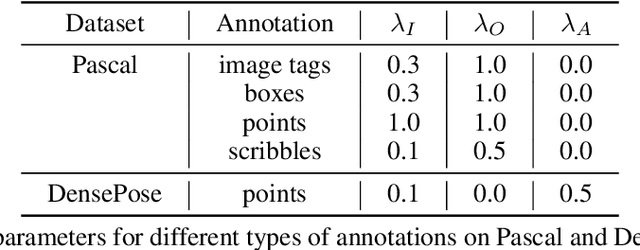
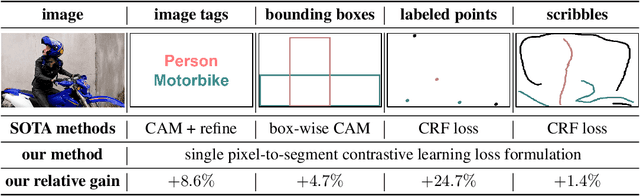
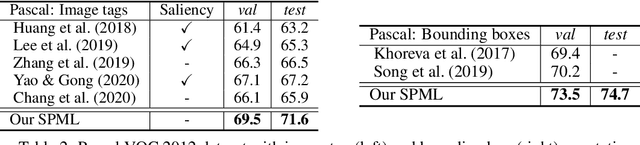
Weakly supervised segmentation requires assigning a label to every pixel based on training instances with partial annotations such as image-level tags, object bounding boxes, labeled points and scribbles. This task is challenging, as coarse annotations (tags, boxes) lack precise pixel localization whereas sparse annotations (points, scribbles) lack broad region coverage. Existing methods tackle these two types of weak supervision differently: Class activation maps are used to localize coarse labels and iteratively refine the segmentation model, whereas conditional random fields are used to propagate sparse labels to the entire image. We formulate weakly supervised segmentation as a semi-supervised metric learning problem, where pixels of the same (different) semantics need to be mapped to the same (distinctive) features. We propose 4 types of contrastive relationships between pixels and segments in the feature space, capturing low-level image similarity, semantic annotation, co-occurrence, and feature affinity They act as priors; the pixel-wise feature can be learned from training images with any partial annotations in a data-driven fashion. In particular, unlabeled pixels in training images participate not only in data-driven grouping within each image, but also in discriminative feature learning within and across images. We deliver a universal weakly supervised segmenter with significant gains on Pascal VOC and DensePose. Our code is publicly available at https://github.com/twke18/SPML.
SegSort: Segmentation by Discriminative Sorting of Segments
Oct 30, 2019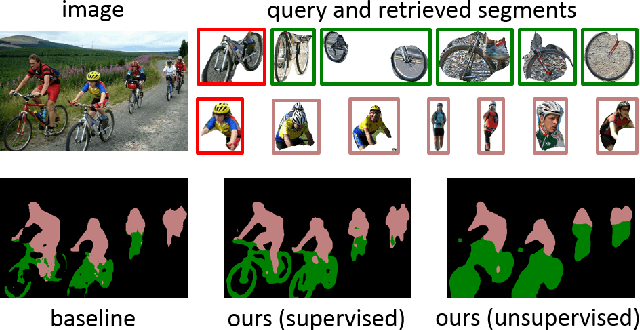
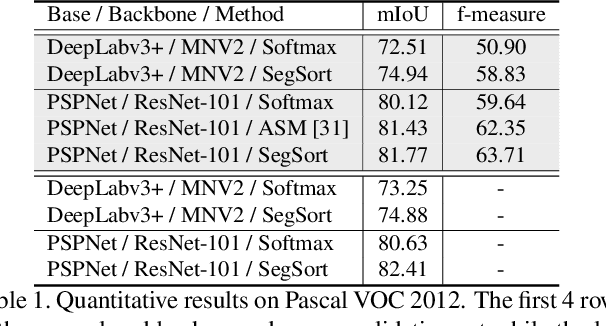
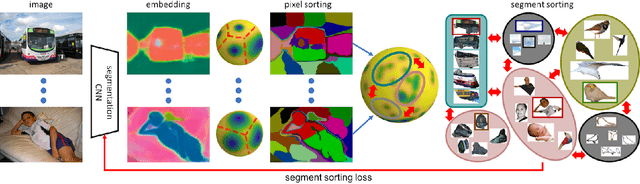
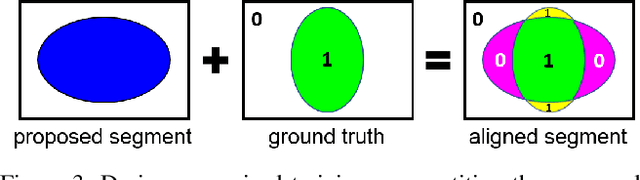
Almost all existing deep learning approaches for semantic segmentation tackle this task as a pixel-wise classification problem. Yet humans understand a scene not in terms of pixels, but by decomposing it into perceptual groups and structures that are the basic building blocks of recognition. This motivates us to propose an end-to-end pixel-wise metric learning approach that mimics this process. In our approach, the optimal visual representation determines the right segmentation within individual images and associates segments with the same semantic classes across images. The core visual learning problem is therefore to maximize the similarity within segments and minimize the similarity between segments. Given a model trained this way, inference is performed consistently by extracting pixel-wise embeddings and clustering, with the semantic label determined by the majority vote of its nearest neighbors from an annotated set. As a result, we present the SegSort, as a first attempt using deep learning for unsupervised semantic segmentation, achieving $76\%$ performance of its supervised counterpart. When supervision is available, SegSort shows consistent improvements over conventional approaches based on pixel-wise softmax training. Additionally, our approach produces more precise boundaries and consistent region predictions. The proposed SegSort further produces an interpretable result, as each choice of label can be easily understood from the retrieved nearest segments.
DeeperLab: Single-Shot Image Parser
Mar 12, 2019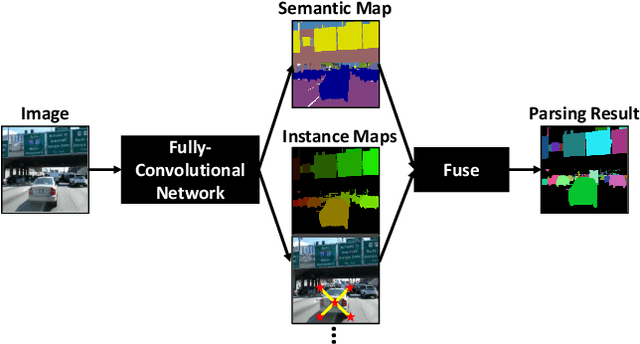
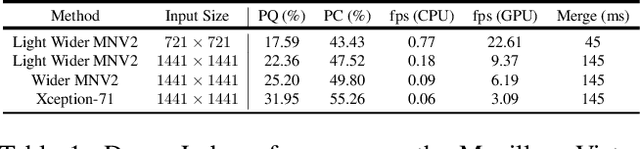


We present a single-shot, bottom-up approach for whole image parsing. Whole image parsing, also known as Panoptic Segmentation, generalizes the tasks of semantic segmentation for 'stuff' classes and instance segmentation for 'thing' classes, assigning both semantic and instance labels to every pixel in an image. Recent approaches to whole image parsing typically employ separate standalone modules for the constituent semantic and instance segmentation tasks and require multiple passes of inference. Instead, the proposed DeeperLab image parser performs whole image parsing with a significantly simpler, fully convolutional approach that jointly addresses the semantic and instance segmentation tasks in a single-shot manner, resulting in a streamlined system that better lends itself to fast processing. For quantitative evaluation, we use both the instance-based Panoptic Quality (PQ) metric and the proposed region-based Parsing Covering (PC) metric, which better captures the image parsing quality on 'stuff' classes and larger object instances. We report experimental results on the challenging Mapillary Vistas dataset, in which our single model achieves 31.95% (val) / 31.6% PQ (test) and 55.26% PC (val) with 3 frames per second (fps) on GPU or near real-time speed (22.6 fps on GPU) with reduced accuracy.