 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMeshPose: Unifying DensePose and 3D Body Mesh reconstruction
Jun 14, 2024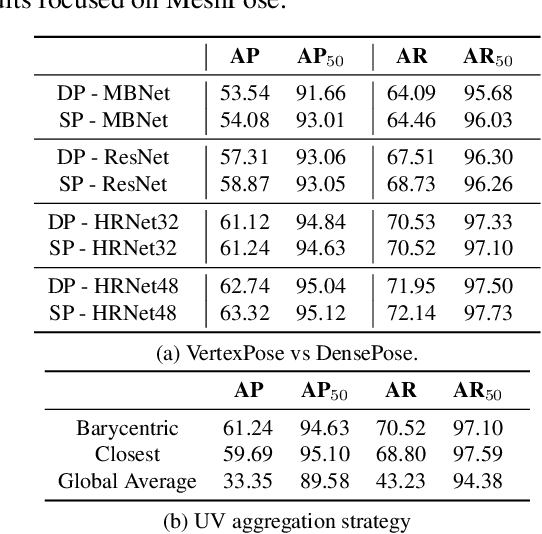
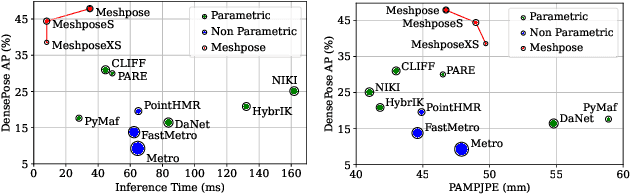

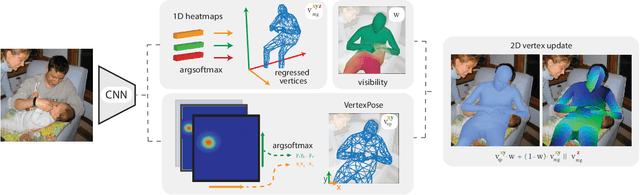
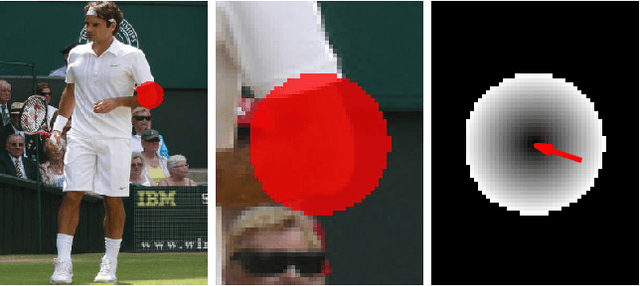
DensePose provides a pixel-accurate association of images with 3D mesh coordinates, but does not provide a 3D mesh, while Human Mesh Reconstruction (HMR) systems have high 2D reprojection error, as measured by DensePose localization metrics. In this work we introduce MeshPose to jointly tackle DensePose and HMR. For this we first introduce new losses that allow us to use weak DensePose supervision to accurately localize in 2D a subset of the mesh vertices ('VertexPose'). We then lift these vertices to 3D, yielding a low-poly body mesh ('MeshPose'). Our system is trained in an end-to-end manner and is the first HMR method to attain competitive DensePose accuracy, while also being lightweight and amenable to efficient inference, making it suitable for real-time AR applications.
* IEEE Conference on Computer Vision and Pattern Recognition (CVPR)
Volumetric Capture of Humans with a Single RGBD Camera via Semi-Parametric Learning
May 29, 2019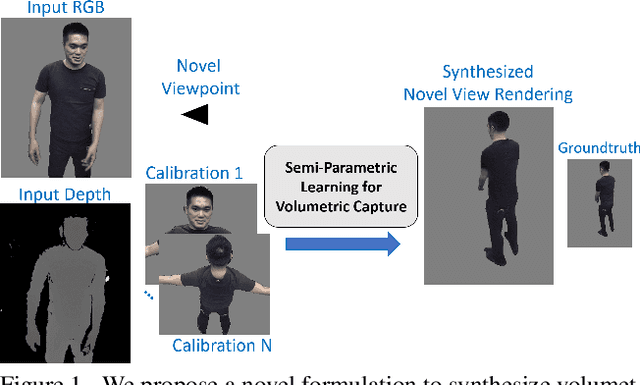

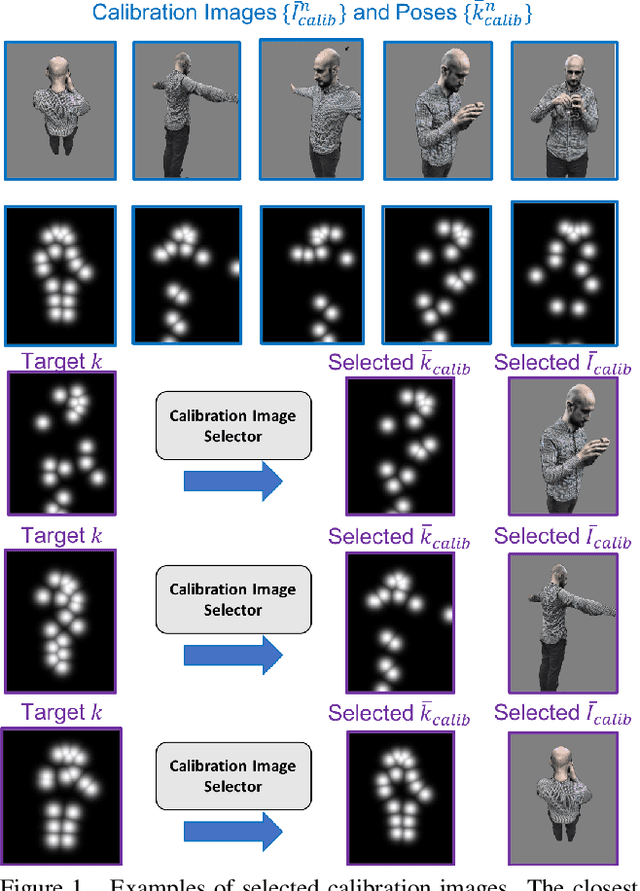
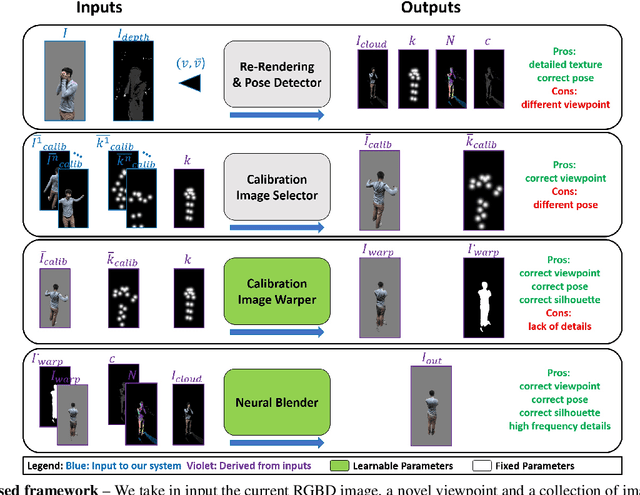
Volumetric (4D) performance capture is fundamental for AR/VR content generation. Whereas previous work in 4D performance capture has shown impressive results in studio settings, the technology is still far from being accessible to a typical consumer who, at best, might own a single RGBD sensor. Thus, in this work, we propose a method to synthesize free viewpoint renderings using a single RGBD camera. The key insight is to leverage previously seen "calibration" images of a given user to extrapolate what should be rendered in a novel viewpoint from the data available in the sensor. Given these past observations from multiple viewpoints, and the current RGBD image from a fixed view, we propose an end-to-end framework that fuses both these data sources to generate novel renderings of the performer. We demonstrate that the method can produce high fidelity images, and handle extreme changes in subject pose and camera viewpoints. We also show that the system generalizes to performers not seen in the training data. We run exhaustive experiments demonstrating the effectiveness of the proposed semi-parametric model (i.e. calibration images available to the neural network) compared to other state of the art machine learned solutions. Further, we compare the method with more traditional pipelines that employ multi-view capture. We show that our framework is able to achieve compelling results, with substantially less infrastructure than previously required.
DeeperLab: Single-Shot Image Parser
Mar 12, 2019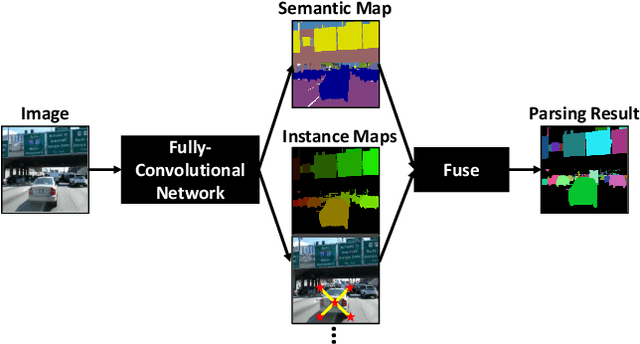
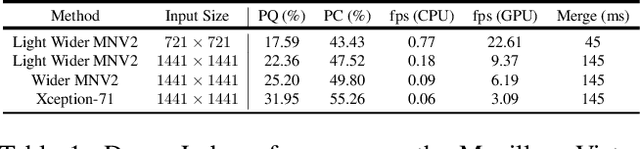


We present a single-shot, bottom-up approach for whole image parsing. Whole image parsing, also known as Panoptic Segmentation, generalizes the tasks of semantic segmentation for 'stuff' classes and instance segmentation for 'thing' classes, assigning both semantic and instance labels to every pixel in an image. Recent approaches to whole image parsing typically employ separate standalone modules for the constituent semantic and instance segmentation tasks and require multiple passes of inference. Instead, the proposed DeeperLab image parser performs whole image parsing with a significantly simpler, fully convolutional approach that jointly addresses the semantic and instance segmentation tasks in a single-shot manner, resulting in a streamlined system that better lends itself to fast processing. For quantitative evaluation, we use both the instance-based Panoptic Quality (PQ) metric and the proposed region-based Parsing Covering (PC) metric, which better captures the image parsing quality on 'stuff' classes and larger object instances. We report experimental results on the challenging Mapillary Vistas dataset, in which our single model achieves 31.95% (val) / 31.6% PQ (test) and 55.26% PC (val) with 3 frames per second (fps) on GPU or near real-time speed (22.6 fps on GPU) with reduced accuracy.
Searching for Efficient Multi-Scale Architectures for Dense Image Prediction
Sep 11, 2018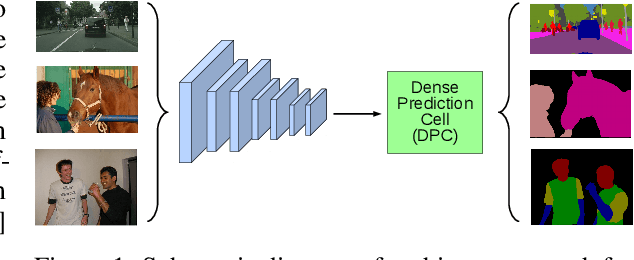
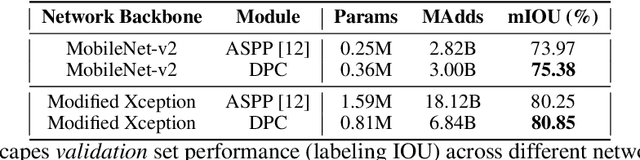
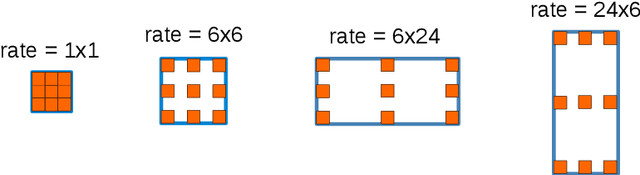
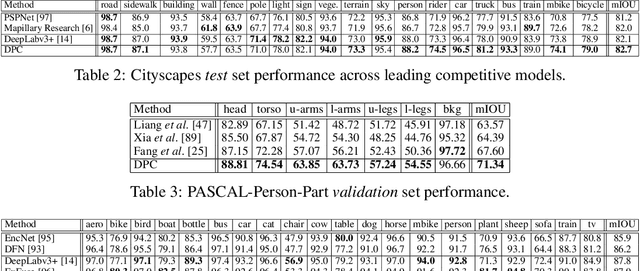
The design of neural network architectures is an important component for achieving state-of-the-art performance with machine learning systems across a broad array of tasks. Much work has endeavored to design and build architectures automatically through clever construction of a search space paired with simple learning algorithms. Recent progress has demonstrated that such meta-learning methods may exceed scalable human-invented architectures on image classification tasks. An open question is the degree to which such methods may generalize to new domains. In this work we explore the construction of meta-learning techniques for dense image prediction focused on the tasks of scene parsing, person-part segmentation, and semantic image segmentation. Constructing viable search spaces in this domain is challenging because of the multi-scale representation of visual information and the necessity to operate on high resolution imagery. Based on a survey of techniques in dense image prediction, we construct a recursive search space and demonstrate that even with efficient random search, we can identify architectures that outperform human-invented architectures and achieve state-of-the-art performance on three dense prediction tasks including 82.7\% on Cityscapes (street scene parsing), 71.3\% on PASCAL-Person-Part (person-part segmentation), and 87.9\% on PASCAL VOC 2012 (semantic image segmentation). Additionally, the resulting architecture is more computationally efficient, requiring half the parameters and half the computational cost as previous state of the art systems.
Encoder-Decoder with Atrous Separable Convolution for Semantic Image Segmentation
Aug 22, 2018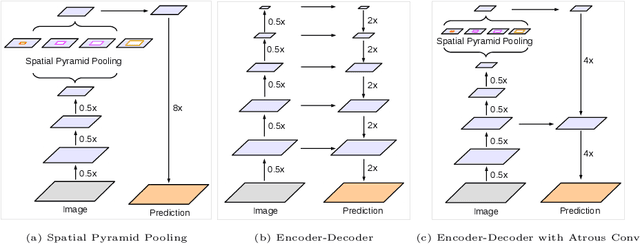


Spatial pyramid pooling module or encode-decoder structure are used in deep neural networks for semantic segmentation task. The former networks are able to encode multi-scale contextual information by probing the incoming features with filters or pooling operations at multiple rates and multiple effective fields-of-view, while the latter networks can capture sharper object boundaries by gradually recovering the spatial information. In this work, we propose to combine the advantages from both methods. Specifically, our proposed model, DeepLabv3+, extends DeepLabv3 by adding a simple yet effective decoder module to refine the segmentation results especially along object boundaries. We further explore the Xception model and apply the depthwise separable convolution to both Atrous Spatial Pyramid Pooling and decoder modules, resulting in a faster and stronger encoder-decoder network. We demonstrate the effectiveness of the proposed model on PASCAL VOC 2012 and Cityscapes datasets, achieving the test set performance of 89.0\% and 82.1\% without any post-processing. Our paper is accompanied with a publicly available reference implementation of the proposed models in Tensorflow at \url{https://github.com/tensorflow/models/tree/master/research/deeplab}.
PersonLab: Person Pose Estimation and Instance Segmentation with a Bottom-Up, Part-Based, Geometric Embedding Model
Mar 22, 2018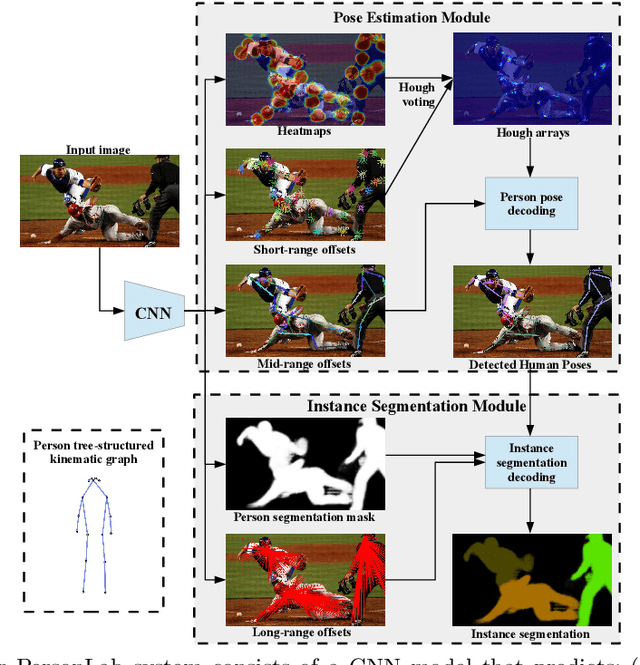
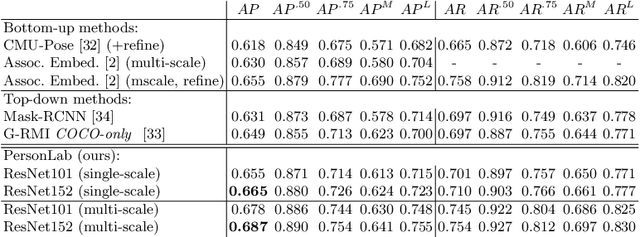
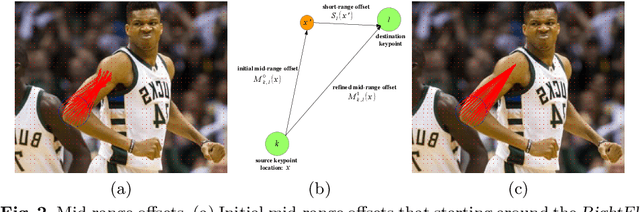
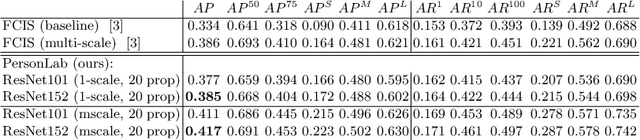
We present a box-free bottom-up approach for the tasks of pose estimation and instance segmentation of people in multi-person images using an efficient single-shot model. The proposed PersonLab model tackles both semantic-level reasoning and object-part associations using part-based modeling. Our model employs a convolutional network which learns to detect individual keypoints and predict their relative displacements, allowing us to group keypoints into person pose instances. Further, we propose a part-induced geometric embedding descriptor which allows us to associate semantic person pixels with their corresponding person instance, delivering instance-level person segmentations. Our system is based on a fully-convolutional architecture and allows for efficient inference, with runtime essentially independent of the number of people present in the scene. Trained on COCO data alone, our system achieves COCO test-dev keypoint average precision of 0.665 using single-scale inference and 0.687 using multi-scale inference, significantly outperforming all previous bottom-up pose estimation systems. We are also the first bottom-up method to report competitive results for the person class in the COCO instance segmentation task, achieving a person category average precision of 0.417.
MaskLab: Instance Segmentation by Refining Object Detection with Semantic and Direction Features
Dec 13, 2017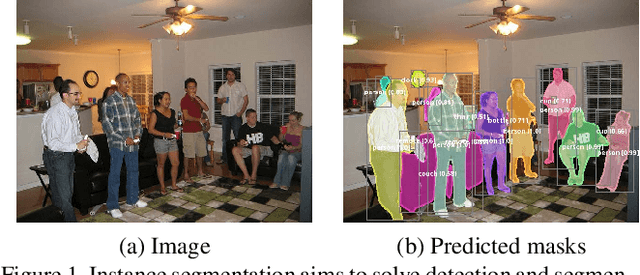
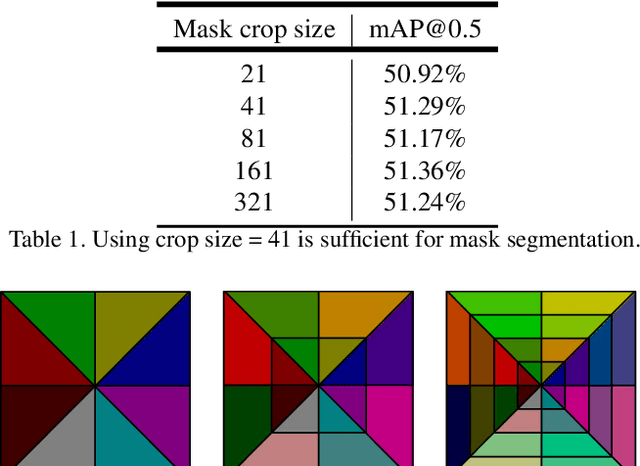
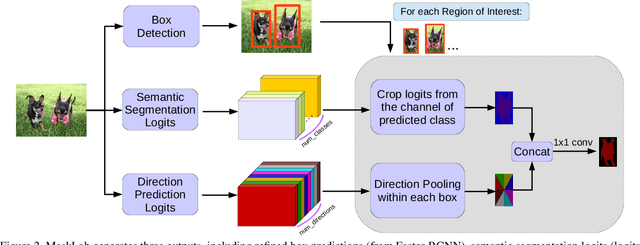

In this work, we tackle the problem of instance segmentation, the task of simultaneously solving object detection and semantic segmentation. Towards this goal, we present a model, called MaskLab, which produces three outputs: box detection, semantic segmentation, and direction prediction. Building on top of the Faster-RCNN object detector, the predicted boxes provide accurate localization of object instances. Within each region of interest, MaskLab performs foreground/background segmentation by combining semantic and direction prediction. Semantic segmentation assists the model in distinguishing between objects of different semantic classes including background, while the direction prediction, estimating each pixel's direction towards its corresponding center, allows separating instances of the same semantic class. Moreover, we explore the effect of incorporating recent successful methods from both segmentation and detection (i.e. atrous convolution and hypercolumn). Our proposed model is evaluated on the COCO instance segmentation benchmark and shows comparable performance with other state-of-art models.
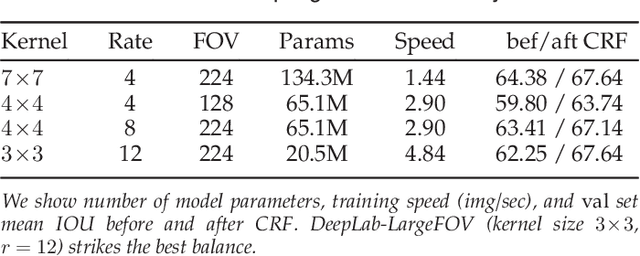
Rethinking Atrous Convolution for Semantic Image Segmentation
Dec 05, 2017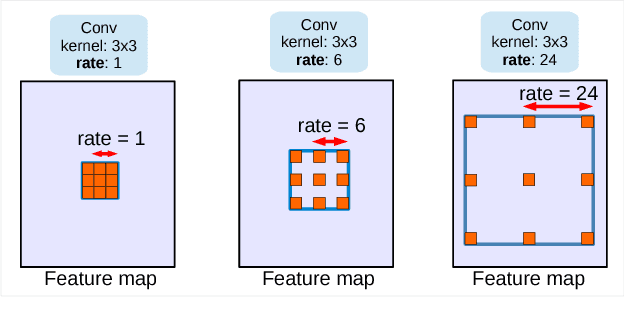

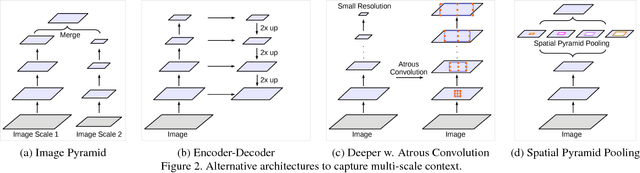
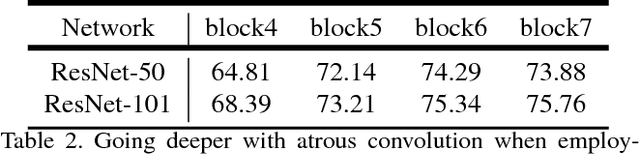
In this work, we revisit atrous convolution, a powerful tool to explicitly adjust filter's field-of-view as well as control the resolution of feature responses computed by Deep Convolutional Neural Networks, in the application of semantic image segmentation. To handle the problem of segmenting objects at multiple scales, we design modules which employ atrous convolution in cascade or in parallel to capture multi-scale context by adopting multiple atrous rates. Furthermore, we propose to augment our previously proposed Atrous Spatial Pyramid Pooling module, which probes convolutional features at multiple scales, with image-level features encoding global context and further boost performance. We also elaborate on implementation details and share our experience on training our system. The proposed `DeepLabv3' system significantly improves over our previous DeepLab versions without DenseCRF post-processing and attains comparable performance with other state-of-art models on the PASCAL VOC 2012 semantic image segmentation benchmark.
DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution, and Fully Connected CRFs
May 12, 2017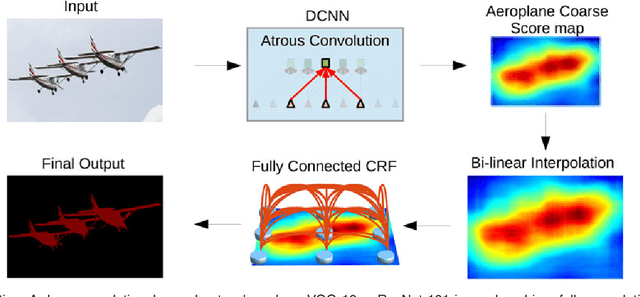
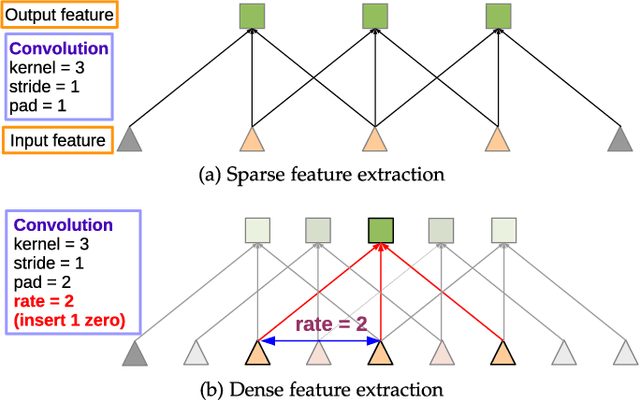

In this work we address the task of semantic image segmentation with Deep Learning and make three main contributions that are experimentally shown to have substantial practical merit. First, we highlight convolution with upsampled filters, or 'atrous convolution', as a powerful tool in dense prediction tasks. Atrous convolution allows us to explicitly control the resolution at which feature responses are computed within Deep Convolutional Neural Networks. It also allows us to effectively enlarge the field of view of filters to incorporate larger context without increasing the number of parameters or the amount of computation. Second, we propose atrous spatial pyramid pooling (ASPP) to robustly segment objects at multiple scales. ASPP probes an incoming convolutional feature layer with filters at multiple sampling rates and effective fields-of-views, thus capturing objects as well as image context at multiple scales. Third, we improve the localization of object boundaries by combining methods from DCNNs and probabilistic graphical models. The commonly deployed combination of max-pooling and downsampling in DCNNs achieves invariance but has a toll on localization accuracy. We overcome this by combining the responses at the final DCNN layer with a fully connected Conditional Random Field (CRF), which is shown both qualitatively and quantitatively to improve localization performance. Our proposed "DeepLab" system sets the new state-of-art at the PASCAL VOC-2012 semantic image segmentation task, reaching 79.7% mIOU in the test set, and advances the results on three other datasets: PASCAL-Context, PASCAL-Person-Part, and Cityscapes. All of our code is made publicly available online.
Towards Accurate Multi-person Pose Estimation in the Wild
Apr 14, 2017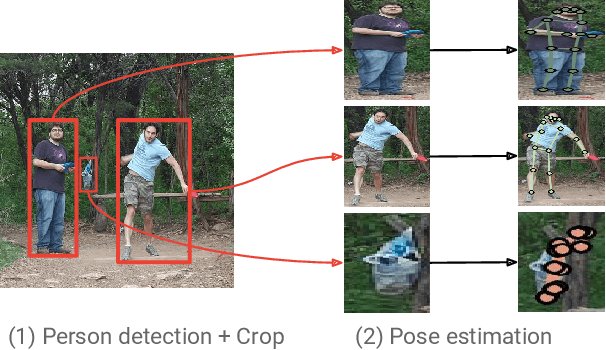


We propose a method for multi-person detection and 2-D pose estimation that achieves state-of-art results on the challenging COCO keypoints task. It is a simple, yet powerful, top-down approach consisting of two stages. In the first stage, we predict the location and scale of boxes which are likely to contain people; for this we use the Faster RCNN detector. In the second stage, we estimate the keypoints of the person potentially contained in each proposed bounding box. For each keypoint type we predict dense heatmaps and offsets using a fully convolutional ResNet. To combine these outputs we introduce a novel aggregation procedure to obtain highly localized keypoint predictions. We also use a novel form of keypoint-based Non-Maximum-Suppression (NMS), instead of the cruder box-level NMS, and a novel form of keypoint-based confidence score estimation, instead of box-level scoring. Trained on COCO data alone, our final system achieves average precision of 0.649 on the COCO test-dev set and the 0.643 test-standard sets, outperforming the winner of the 2016 COCO keypoints challenge and other recent state-of-art. Further, by using additional in-house labeled data we obtain an even higher average precision of 0.685 on the test-dev set and 0.673 on the test-standard set, more than 5% absolute improvement compared to the previous best performing method on the same dataset.