 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVolumetric Capture of Humans with a Single RGBD Camera via Semi-Parametric Learning
May 29, 2019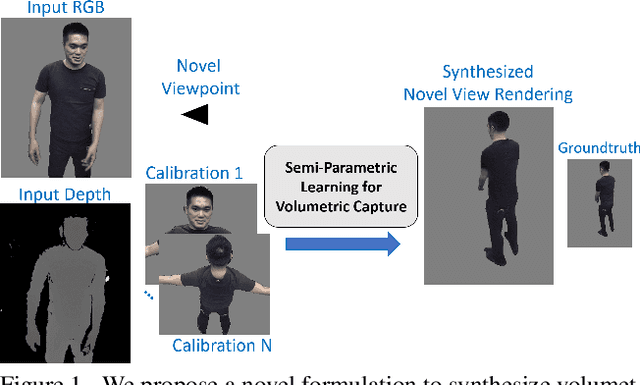

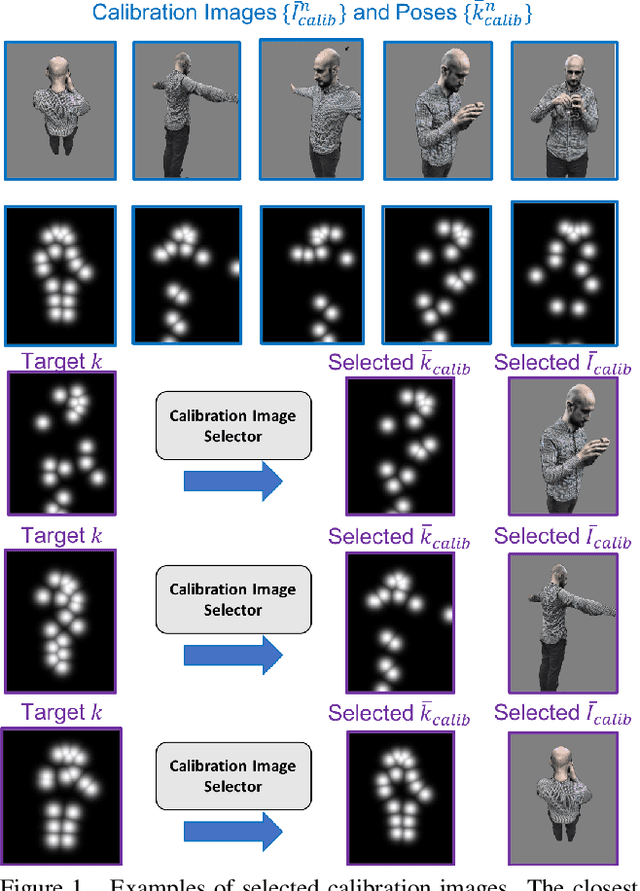
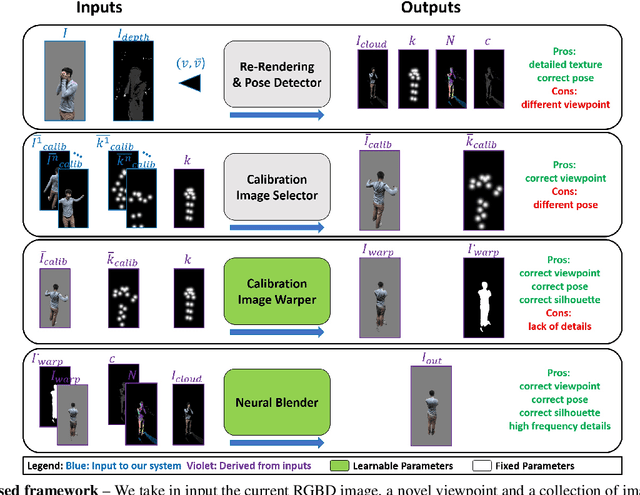
Volumetric (4D) performance capture is fundamental for AR/VR content generation. Whereas previous work in 4D performance capture has shown impressive results in studio settings, the technology is still far from being accessible to a typical consumer who, at best, might own a single RGBD sensor. Thus, in this work, we propose a method to synthesize free viewpoint renderings using a single RGBD camera. The key insight is to leverage previously seen "calibration" images of a given user to extrapolate what should be rendered in a novel viewpoint from the data available in the sensor. Given these past observations from multiple viewpoints, and the current RGBD image from a fixed view, we propose an end-to-end framework that fuses both these data sources to generate novel renderings of the performer. We demonstrate that the method can produce high fidelity images, and handle extreme changes in subject pose and camera viewpoints. We also show that the system generalizes to performers not seen in the training data. We run exhaustive experiments demonstrating the effectiveness of the proposed semi-parametric model (i.e. calibration images available to the neural network) compared to other state of the art machine learned solutions. Further, we compare the method with more traditional pipelines that employ multi-view capture. We show that our framework is able to achieve compelling results, with substantially less infrastructure than previously required.
LookinGood: Enhancing Performance Capture with Real-time Neural Re-Rendering
Nov 12, 2018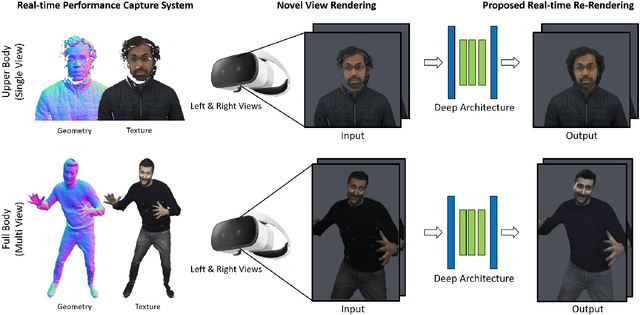
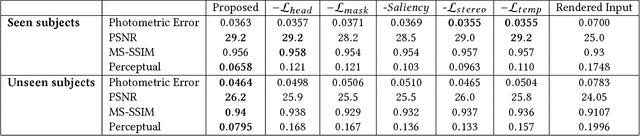
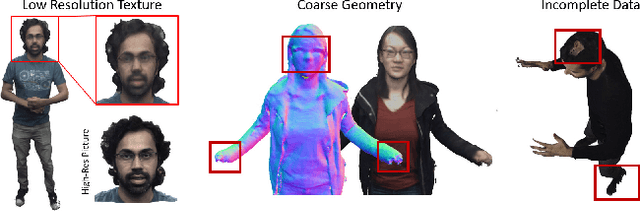
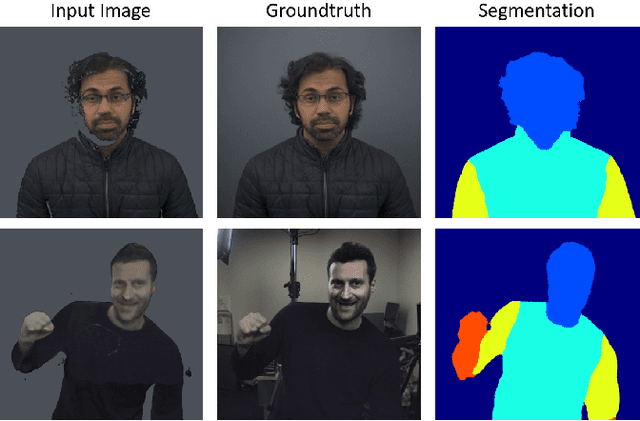
Motivated by augmented and virtual reality applications such as telepresence, there has been a recent focus in real-time performance capture of humans under motion. However, given the real-time constraint, these systems often suffer from artifacts in geometry and texture such as holes and noise in the final rendering, poor lighting, and low-resolution textures. We take the novel approach to augment such real-time performance capture systems with a deep architecture that takes a rendering from an arbitrary viewpoint, and jointly performs completion, super resolution, and denoising of the imagery in real-time. We call this approach neural (re-)rendering, and our live system "LookinGood". Our deep architecture is trained to produce high resolution and high quality images from a coarse rendering in real-time. First, we propose a self-supervised training method that does not require manual ground-truth annotation. We contribute a specialized reconstruction error that uses semantic information to focus on relevant parts of the subject, e.g. the face. We also introduce a salient reweighing scheme of the loss function that is able to discard outliers. We specifically design the system for virtual and augmented reality headsets where the consistency between the left and right eye plays a crucial role in the final user experience. Finally, we generate temporally stable results by explicitly minimizing the difference between two consecutive frames. We tested the proposed system in two different scenarios: one involving a single RGB-D sensor, and upper body reconstruction of an actor, the second consisting of full body 360 degree capture. Through extensive experimentation, we demonstrate how our system generalizes across unseen sequences and subjects. The supplementary video is available at http://youtu.be/Md3tdAKoLGU.
Egocentric 6-DoF Tracking of Small Handheld Objects
Apr 16, 2018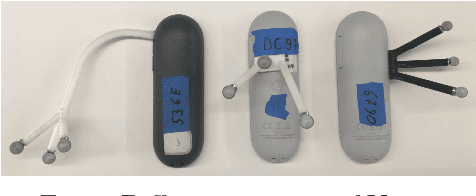
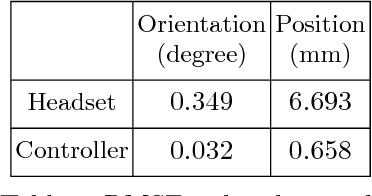


Virtual and augmented reality technologies have seen significant growth in the past few years. A key component of such systems is the ability to track the pose of head mounted displays and controllers in 3D space. We tackle the problem of efficient 6-DoF tracking of a handheld controller from egocentric camera perspectives. We collected the HMD Controller dataset which consist of over 540,000 stereo image pairs labelled with the full 6-DoF pose of the handheld controller. Our proposed SSD-AF-Stereo3D model achieves a mean average error of 33.5 millimeters in 3D keypoint prediction and is used in conjunction with an IMU sensor on the controller to enable 6-DoF tracking. We also present results on approaches for model based full 6-DoF tracking. All our models operate under the strict constraints of real time mobile CPU inference.