 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEgoPoseFormer v2: Accurate Egocentric Human Motion Estimation for AR/VR
Mar 04, 2026Egocentric human motion estimation is essential for AR/VR experiences, yet remains challenging due to limited body coverage from the egocentric viewpoint, frequent occlusions, and scarce labeled data. We present EgoPoseFormer v2, a method that addresses these challenges through two key contributions: (1) a transformer-based model for temporally consistent and spatially grounded body pose estimation, and (2) an auto-labeling system that enables the use of large unlabeled datasets for training. Our model is fully differentiable, introduces identity-conditioned queries, multi-view spatial refinement, causal temporal attention, and supports both keypoints and parametric body representations under a constant compute budget. The auto-labeling system scales learning to tens of millions of unlabeled frames via uncertainty-aware semi-supervised training. The system follows a teacher-student schema to generate pseudo-labels and guide training with uncertainty distillation, enabling the model to generalize to different environments. On the EgoBody3M benchmark, with a 0.8 ms latency on GPU, our model outperforms two state-of-the-art methods by 12.2% and 19.4% in accuracy, and reduces temporal jitter by 22.2% and 51.7%. Furthermore, our auto-labeling system further improves the wrist MPJPE by 13.1%.
PALM: A Dataset and Baseline for Learning Multi-subject Hand Prior
Nov 07, 2025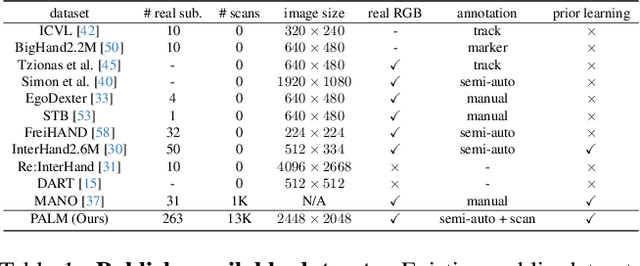
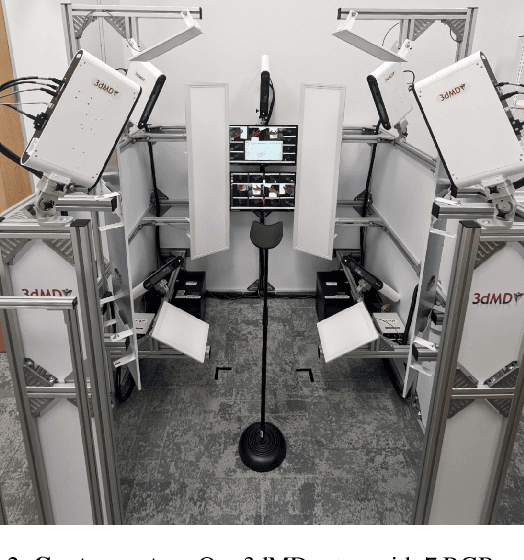
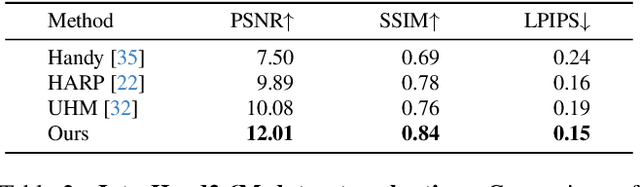
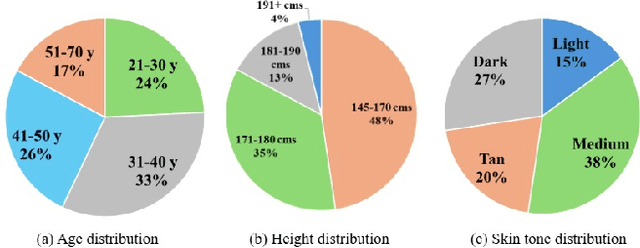
The ability to grasp objects, signal with gestures, and share emotion through touch all stem from the unique capabilities of human hands. Yet creating high-quality personalized hand avatars from images remains challenging due to complex geometry, appearance, and articulation, particularly under unconstrained lighting and limited views. Progress has also been limited by the lack of datasets that jointly provide accurate 3D geometry, high-resolution multiview imagery, and a diverse population of subjects. To address this, we present PALM, a large-scale dataset comprising 13k high-quality hand scans from 263 subjects and 90k multi-view images, capturing rich variation in skin tone, age, and geometry. To show its utility, we present a baseline PALM-Net, a multi-subject prior over hand geometry and material properties learned via physically based inverse rendering, enabling realistic, relightable single-image hand avatar personalization. PALM's scale and diversity make it a valuable real-world resource for hand modeling and related research.
Geometric Neural Distance Fields for Learning Human Motion Priors
Sep 11, 2025We introduce Neural Riemannian Motion Fields (NRMF), a novel 3D generative human motion prior that enables robust, temporally consistent, and physically plausible 3D motion recovery. Unlike existing VAE or diffusion-based methods, our higher-order motion prior explicitly models the human motion in the zero level set of a collection of neural distance fields (NDFs) corresponding to pose, transition (velocity), and acceleration dynamics. Our framework is rigorous in the sense that our NDFs are constructed on the product space of joint rotations, their angular velocities, and angular accelerations, respecting the geometry of the underlying articulations. We further introduce: (i) a novel adaptive-step hybrid algorithm for projecting onto the set of plausible motions, and (ii) a novel geometric integrator to "roll out" realistic motion trajectories during test-time-optimization and generation. Our experiments show significant and consistent gains: trained on the AMASS dataset, NRMF remarkably generalizes across multiple input modalities and to diverse tasks ranging from denoising to motion in-betweening and fitting to partial 2D / 3D observations.
GoTrack: Generic 6DoF Object Pose Refinement and Tracking
Jun 08, 2025We introduce GoTrack, an efficient and accurate CAD-based method for 6DoF object pose refinement and tracking, which can handle diverse objects without any object-specific training. Unlike existing tracking methods that rely solely on an analysis-by-synthesis approach for model-to-frame registration, GoTrack additionally integrates frame-to-frame registration, which saves compute and stabilizes tracking. Both types of registration are realized by optical flow estimation. The model-to-frame registration is noticeably simpler than in existing methods, relying only on standard neural network blocks (a transformer is trained on top of DINOv2) and producing reliable pose confidence scores without a scoring network. For the frame-to-frame registration, which is an easier problem as consecutive video frames are typically nearly identical, we employ a light off-the-shelf optical flow model. We demonstrate that GoTrack can be seamlessly combined with existing coarse pose estimation methods to create a minimal pipeline that reaches state-of-the-art RGB-only results on standard benchmarks for 6DoF object pose estimation and tracking. Our source code and trained models are publicly available at https://github.com/facebookresearch/gotrack
FoundHand: Large-Scale Domain-Specific Learning for Controllable Hand Image Generation
Dec 03, 2024



Despite remarkable progress in image generation models, generating realistic hands remains a persistent challenge due to their complex articulation, varying viewpoints, and frequent occlusions. We present FoundHand, a large-scale domain-specific diffusion model for synthesizing single and dual hand images. To train our model, we introduce FoundHand-10M, a large-scale hand dataset with 2D keypoints and segmentation mask annotations. Our insight is to use 2D hand keypoints as a universal representation that encodes both hand articulation and camera viewpoint. FoundHand learns from image pairs to capture physically plausible hand articulations, natively enables precise control through 2D keypoints, and supports appearance control. Our model exhibits core capabilities that include the ability to repose hands, transfer hand appearance, and even synthesize novel views. This leads to zero-shot capabilities for fixing malformed hands in previously generated images, or synthesizing hand video sequences. We present extensive experiments and evaluations that demonstrate state-of-the-art performance of our method.
EgoPoseFormer: A Simple Baseline for Egocentric 3D Human Pose Estimation
Mar 26, 2024



We present EgoPoseFormer, a simple yet effective transformer-based model for stereo egocentric human pose estimation. The main challenge in egocentric pose estimation is overcoming joint invisibility, which is caused by self-occlusion or a limited field of view (FOV) of head-mounted cameras. Our approach overcomes this challenge by incorporating a two-stage pose estimation paradigm: in the first stage, our model leverages the global information to estimate each joint's coarse location, then in the second stage, it employs a DETR style transformer to refine the coarse locations by exploiting fine-grained stereo visual features. In addition, we present a deformable stereo operation to enable our transformer to effectively process multi-view features, which enables it to accurately localize each joint in the 3D world. We evaluate our method on the stereo UnrealEgo dataset and show it significantly outperforms previous approaches while being computationally efficient: it improves MPJPE by 27.4mm (45% improvement) with only 7.9% model parameters and 13.1% FLOPs compared to the state-of-the-art. Surprisingly, with proper training techniques, we find that even our first-stage pose proposal network can achieve superior performance compared to previous arts. We also show that our method can be seamlessly extended to monocular settings, which achieves state-of-the-art performance on the SceneEgo dataset, improving MPJPE by 25.5mm (21% improvement) compared to the best existing method with only 60.7% model parameters and 36.4% FLOPs.
FoundPose: Unseen Object Pose Estimation with Foundation Features
Nov 30, 2023



We propose FoundPose, a method for 6D pose estimation of unseen rigid objects from a single RGB image. The method assumes that 3D models of the objects are available but does not require any object-specific training. This is achieved by building upon DINOv2, a recent vision foundation model with impressive generalization capabilities. An online pose estimation stage is supported by a minimal object representation that is built during a short onboarding stage from DINOv2 patch features extracted from rendered object templates. Given a query image with an object segmentation mask, FoundPose first rapidly retrieves a handful of similarly looking templates by a DINOv2-based bag-of-words approach. Pose hypotheses are then generated from 2D-3D correspondences established by matching DINOv2 patch features between the query image and a retrieved template, and finally optimized by featuremetric refinement. The method can handle diverse objects, including challenging ones with symmetries and without any texture, and noticeably outperforms existing RGB methods for coarse pose estimation in both accuracy and speed on the standard BOP benchmark. With the featuremetric and additional MegaPose refinement, which are demonstrated complementary, the method outperforms all RGB competitors. Source code is at: evinpinar.github.io/foundpose.
AssemblyHands: Towards Egocentric Activity Understanding via 3D Hand Pose Estimation
Apr 24, 2023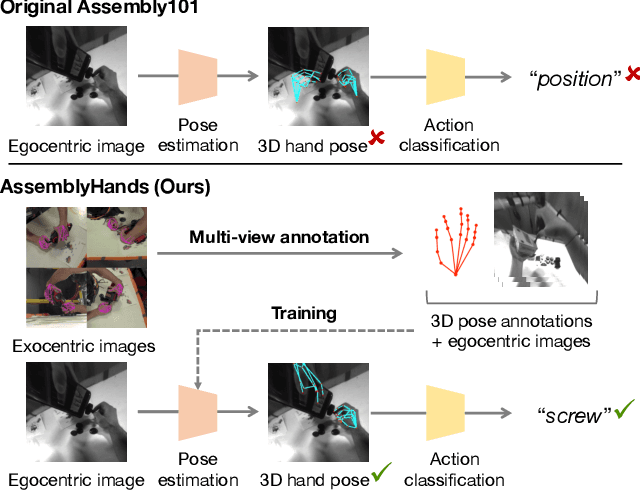
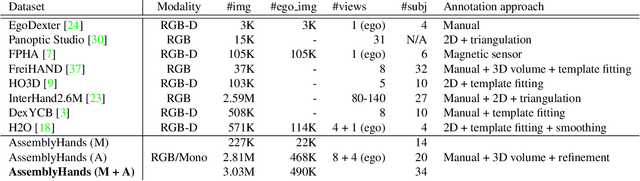
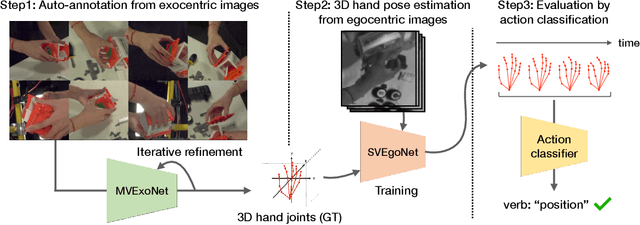
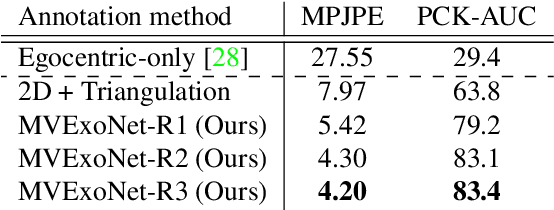
We present AssemblyHands, a large-scale benchmark dataset with accurate 3D hand pose annotations, to facilitate the study of egocentric activities with challenging hand-object interactions. The dataset includes synchronized egocentric and exocentric images sampled from the recent Assembly101 dataset, in which participants assemble and disassemble take-apart toys. To obtain high-quality 3D hand pose annotations for the egocentric images, we develop an efficient pipeline, where we use an initial set of manual annotations to train a model to automatically annotate a much larger dataset. Our annotation model uses multi-view feature fusion and an iterative refinement scheme, and achieves an average keypoint error of 4.20 mm, which is 85% lower than the error of the original annotations in Assembly101. AssemblyHands provides 3.0M annotated images, including 490K egocentric images, making it the largest existing benchmark dataset for egocentric 3D hand pose estimation. Using this data, we develop a strong single-view baseline of 3D hand pose estimation from egocentric images. Furthermore, we design a novel action classification task to evaluate predicted 3D hand poses. Our study shows that having higher-quality hand poses directly improves the ability to recognize actions.
In-Hand 3D Object Scanning from an RGB Sequence
Nov 28, 2022
We propose a method for in-hand 3D scanning of an unknown object from a sequence of color images. We cast the problem as reconstructing the object surface from un-posed multi-view images and rely on a neural implicit surface representation that captures both the geometry and the appearance of the object. By contrast with most NeRF-based methods, we do not assume that the camera-object relative poses are known and instead simultaneously optimize both the object shape and the pose trajectory. As global optimization over all the shape and pose parameters is prone to fail without coarse-level initialization of the poses, we propose an incremental approach which starts by splitting the sequence into carefully selected overlapping segments within which the optimization is likely to succeed. We incrementally reconstruct the object shape and track the object poses independently within each segment, and later merge all the segments by aligning poses estimated at the overlapping frames. Finally, we perform a global optimization over all the aligned segments to achieve full reconstruction. We experimentally show that the proposed method is able to reconstruct the shape and color of both textured and challenging texture-less objects, outperforms classical methods that rely only on appearance features, and its performance is close to recent methods that assume known camera poses.
UmeTrack: Unified multi-view end-to-end hand tracking for VR
Oct 31, 2022
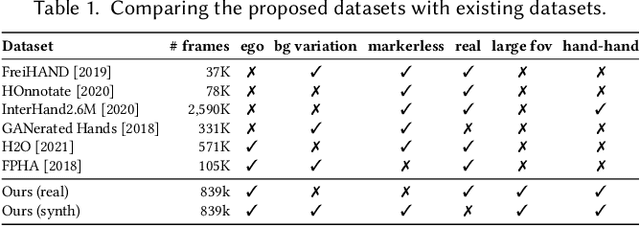
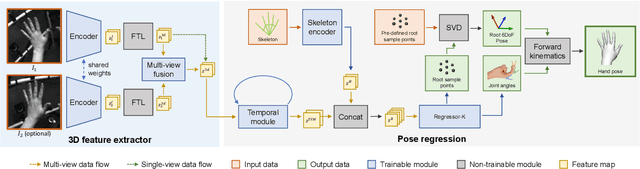
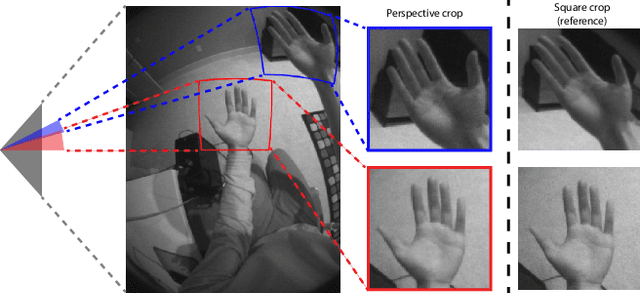
Real-time tracking of 3D hand pose in world space is a challenging problem and plays an important role in VR interaction. Existing work in this space are limited to either producing root-relative (versus world space) 3D pose or rely on multiple stages such as generating heatmaps and kinematic optimization to obtain 3D pose. Moreover, the typical VR scenario, which involves multi-view tracking from wide \ac{fov} cameras is seldom addressed by these methods. In this paper, we present a unified end-to-end differentiable framework for multi-view, multi-frame hand tracking that directly predicts 3D hand pose in world space. We demonstrate the benefits of end-to-end differentiabilty by extending our framework with downstream tasks such as jitter reduction and pinch prediction. To demonstrate the efficacy of our model, we further present a new large-scale egocentric hand pose dataset that consists of both real and synthetic data. Experiments show that our system trained on this dataset handles various challenging interactive motions, and has been successfully applied to real-time VR applications.