 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePOET: Prompt Offset Tuning for Continual Human Action Adaptation
Apr 25, 2025As extended reality (XR) is redefining how users interact with computing devices, research in human action recognition is gaining prominence. Typically, models deployed on immersive computing devices are static and limited to their default set of classes. The goal of our research is to provide users and developers with the capability to personalize their experience by adding new action classes to their device models continually. Importantly, a user should be able to add new classes in a low-shot and efficient manner, while this process should not require storing or replaying any of user's sensitive training data. We formalize this problem as privacy-aware few-shot continual action recognition. Towards this end, we propose POET: Prompt-Offset Tuning. While existing prompt tuning approaches have shown great promise for continual learning of image, text, and video modalities; they demand access to extensively pretrained transformers. Breaking away from this assumption, POET demonstrates the efficacy of prompt tuning a significantly lightweight backbone, pretrained exclusively on the base class data. We propose a novel spatio-temporal learnable prompt offset tuning approach, and are the first to apply such prompt tuning to Graph Neural Networks. We contribute two new benchmarks for our new problem setting in human action recognition: (i) NTU RGB+D dataset for activity recognition, and (ii) SHREC-2017 dataset for hand gesture recognition. We find that POET consistently outperforms comprehensive benchmarks. Source code at https://github.com/humansensinglab/POET-continual-action-recognition.
* ECCV 2024 (Oral), webpage https://humansensinglab.github.io/POET-continual-action-recognition/
UmeTrack: Unified multi-view end-to-end hand tracking for VR
Oct 31, 2022
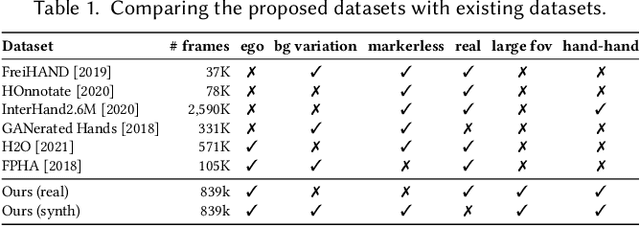
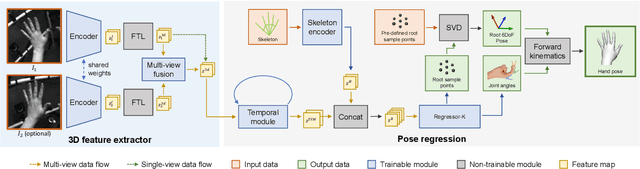
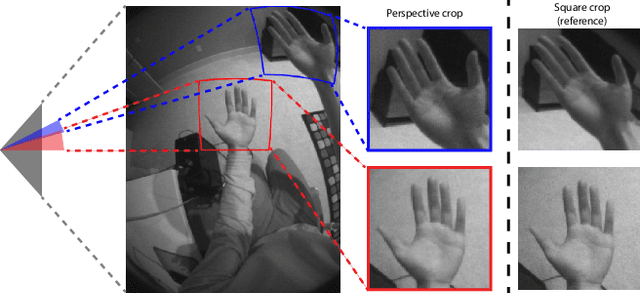
Real-time tracking of 3D hand pose in world space is a challenging problem and plays an important role in VR interaction. Existing work in this space are limited to either producing root-relative (versus world space) 3D pose or rely on multiple stages such as generating heatmaps and kinematic optimization to obtain 3D pose. Moreover, the typical VR scenario, which involves multi-view tracking from wide \ac{fov} cameras is seldom addressed by these methods. In this paper, we present a unified end-to-end differentiable framework for multi-view, multi-frame hand tracking that directly predicts 3D hand pose in world space. We demonstrate the benefits of end-to-end differentiabilty by extending our framework with downstream tasks such as jitter reduction and pinch prediction. To demonstrate the efficacy of our model, we further present a new large-scale egocentric hand pose dataset that consists of both real and synthetic data. Experiments show that our system trained on this dataset handles various challenging interactive motions, and has been successfully applied to real-time VR applications.