 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSHOW3D: Capturing Scenes of 3D Hands and Objects in the Wild
Mar 30, 2026Accurate 3D understanding of human hands and objects during manipulation remains a significant challenge for egocentric computer vision. Existing hand-object interaction datasets are predominantly captured in controlled studio settings, which limits both environmental diversity and the ability of models trained on such data to generalize to real-world scenarios. To address this challenge, we introduce a novel marker-less multi-camera system that allows for nearly unconstrained mobility in genuinely in-the-wild conditions, while still having the ability to generate precise 3D annotations of hands and objects. The capture system consists of a lightweight, back-mounted, multi-camera rig that is synchronized and calibrated with a user-worn VR headset. For 3D ground-truth annotation of hands and objects, we develop an ego-exo tracking pipeline and rigorously evaluate its quality. Finally, we present SHOW3D, the first large-scale dataset with 3D annotations that show hands interacting with objects in diverse real-world environments, including outdoor settings. Our approach significantly reduces the fundamental trade-off between environmental realism and accuracy of 3D annotations, which we validate with experiments on several downstream tasks. show3d-dataset.github.io
EgoPoseFormer v2: Accurate Egocentric Human Motion Estimation for AR/VR
Mar 04, 2026Egocentric human motion estimation is essential for AR/VR experiences, yet remains challenging due to limited body coverage from the egocentric viewpoint, frequent occlusions, and scarce labeled data. We present EgoPoseFormer v2, a method that addresses these challenges through two key contributions: (1) a transformer-based model for temporally consistent and spatially grounded body pose estimation, and (2) an auto-labeling system that enables the use of large unlabeled datasets for training. Our model is fully differentiable, introduces identity-conditioned queries, multi-view spatial refinement, causal temporal attention, and supports both keypoints and parametric body representations under a constant compute budget. The auto-labeling system scales learning to tens of millions of unlabeled frames via uncertainty-aware semi-supervised training. The system follows a teacher-student schema to generate pseudo-labels and guide training with uncertainty distillation, enabling the model to generalize to different environments. On the EgoBody3M benchmark, with a 0.8 ms latency on GPU, our model outperforms two state-of-the-art methods by 12.2% and 19.4% in accuracy, and reduces temporal jitter by 22.2% and 51.7%. Furthermore, our auto-labeling system further improves the wrist MPJPE by 13.1%.
GoTrack: Generic 6DoF Object Pose Refinement and Tracking
Jun 08, 2025We introduce GoTrack, an efficient and accurate CAD-based method for 6DoF object pose refinement and tracking, which can handle diverse objects without any object-specific training. Unlike existing tracking methods that rely solely on an analysis-by-synthesis approach for model-to-frame registration, GoTrack additionally integrates frame-to-frame registration, which saves compute and stabilizes tracking. Both types of registration are realized by optical flow estimation. The model-to-frame registration is noticeably simpler than in existing methods, relying only on standard neural network blocks (a transformer is trained on top of DINOv2) and producing reliable pose confidence scores without a scoring network. For the frame-to-frame registration, which is an easier problem as consecutive video frames are typically nearly identical, we employ a light off-the-shelf optical flow model. We demonstrate that GoTrack can be seamlessly combined with existing coarse pose estimation methods to create a minimal pipeline that reaches state-of-the-art RGB-only results on standard benchmarks for 6DoF object pose estimation and tracking. Our source code and trained models are publicly available at https://github.com/facebookresearch/gotrack
BOP Challenge 2024 on Model-Based and Model-Free 6D Object Pose Estimation
Apr 03, 2025We present the evaluation methodology, datasets and results of the BOP Challenge 2024, the sixth in a series of public competitions organized to capture the state of the art in 6D object pose estimation and related tasks. In 2024, our goal was to transition BOP from lab-like setups to real-world scenarios. First, we introduced new model-free tasks, where no 3D object models are available and methods need to onboard objects just from provided reference videos. Second, we defined a new, more practical 6D object detection task where identities of objects visible in a test image are not provided as input. Third, we introduced new BOP-H3 datasets recorded with high-resolution sensors and AR/VR headsets, closely resembling real-world scenarios. BOP-H3 include 3D models and onboarding videos to support both model-based and model-free tasks. Participants competed on seven challenge tracks, each defined by a task, object onboarding setup, and dataset group. Notably, the best 2024 method for model-based 6D localization of unseen objects (FreeZeV2.1) achieves 22% higher accuracy on BOP-Classic-Core than the best 2023 method (GenFlow), and is only 4% behind the best 2023 method for seen objects (GPose2023) although being significantly slower (24.9 vs 2.7s per image). A more practical 2024 method for this task is Co-op which takes only 0.8s per image and is 25X faster and 13% more accurate than GenFlow. Methods have a similar ranking on 6D detection as on 6D localization but higher run time. On model-based 2D detection of unseen objects, the best 2024 method (MUSE) achieves 21% relative improvement compared to the best 2023 method (CNOS). However, the 2D detection accuracy for unseen objects is still noticealy (-53%) behind the accuracy for seen objects (GDet2023). The online evaluation system stays open and is available at http://bop.felk.cvut.cz/
HOT3D: Hand and Object Tracking in 3D from Egocentric Multi-View Videos
Nov 28, 2024We introduce HOT3D, a publicly available dataset for egocentric hand and object tracking in 3D. The dataset offers over 833 minutes (more than 3.7M images) of multi-view RGB/monochrome image streams showing 19 subjects interacting with 33 diverse rigid objects, multi-modal signals such as eye gaze or scene point clouds, as well as comprehensive ground-truth annotations including 3D poses of objects, hands, and cameras, and 3D models of hands and objects. In addition to simple pick-up/observe/put-down actions, HOT3D contains scenarios resembling typical actions in a kitchen, office, and living room environment. The dataset is recorded by two head-mounted devices from Meta: Project Aria, a research prototype of light-weight AR/AI glasses, and Quest 3, a production VR headset sold in millions of units. Ground-truth poses were obtained by a professional motion-capture system using small optical markers attached to hands and objects. Hand annotations are provided in the UmeTrack and MANO formats and objects are represented by 3D meshes with PBR materials obtained by an in-house scanner. In our experiments, we demonstrate the effectiveness of multi-view egocentric data for three popular tasks: 3D hand tracking, 6DoF object pose estimation, and 3D lifting of unknown in-hand objects. The evaluated multi-view methods, whose benchmarking is uniquely enabled by HOT3D, significantly outperform their single-view counterparts.
Introducing HOT3D: An Egocentric Dataset for 3D Hand and Object Tracking
Jun 13, 2024We introduce HOT3D, a publicly available dataset for egocentric hand and object tracking in 3D. The dataset offers over 833 minutes (more than 3.7M images) of multi-view RGB/monochrome image streams showing 19 subjects interacting with 33 diverse rigid objects, multi-modal signals such as eye gaze or scene point clouds, as well as comprehensive ground truth annotations including 3D poses of objects, hands, and cameras, and 3D models of hands and objects. In addition to simple pick-up/observe/put-down actions, HOT3D contains scenarios resembling typical actions in a kitchen, office, and living room environment. The dataset is recorded by two head-mounted devices from Meta: Project Aria, a research prototype of light-weight AR/AI glasses, and Quest 3, a production VR headset sold in millions of units. Ground-truth poses were obtained by a professional motion-capture system using small optical markers attached to hands and objects. Hand annotations are provided in the UmeTrack and MANO formats and objects are represented by 3D meshes with PBR materials obtained by an in-house scanner. We aim to accelerate research on egocentric hand-object interaction by making the HOT3D dataset publicly available and by co-organizing public challenges on the dataset at ECCV 2024. The dataset can be downloaded from the project website: https://facebookresearch.github.io/hot3d/.
DiffH2O: Diffusion-Based Synthesis of Hand-Object Interactions from Textual Descriptions
Mar 26, 2024



Generating natural hand-object interactions in 3D is challenging as the resulting hand and object motions are expected to be physically plausible and semantically meaningful. Furthermore, generalization to unseen objects is hindered by the limited scale of available hand-object interaction datasets. We propose DiffH2O, a novel method to synthesize realistic, one or two-handed object interactions from provided text prompts and geometry of the object. The method introduces three techniques that enable effective learning from limited data. First, we decompose the task into a grasping stage and a text-based interaction stage and use separate diffusion models for each. In the grasping stage, the model only generates hand motions, whereas in the interaction phase both hand and object poses are synthesized. Second, we propose a compact representation that tightly couples hand and object poses. Third, we propose two different guidance schemes to allow more control of the generated motions: grasp guidance and detailed textual guidance. Grasp guidance takes a single target grasping pose and guides the diffusion model to reach this grasp at the end of the grasping stage, which provides control over the grasping pose. Given a grasping motion from this stage, multiple different actions can be prompted in the interaction phase. For textual guidance, we contribute comprehensive text descriptions to the GRAB dataset and show that they enable our method to have more fine-grained control over hand-object interactions. Our quantitative and qualitative evaluation demonstrates that the proposed method outperforms baseline methods and leads to natural hand-object motions. Moreover, we demonstrate the practicality of our framework by utilizing a hand pose estimate from an off-the-shelf pose estimator for guidance, and then sampling multiple different actions in the interaction stage.
BOP Challenge 2023 on Detection, Segmentation and Pose Estimation of Seen and Unseen Rigid Objects
Mar 14, 2024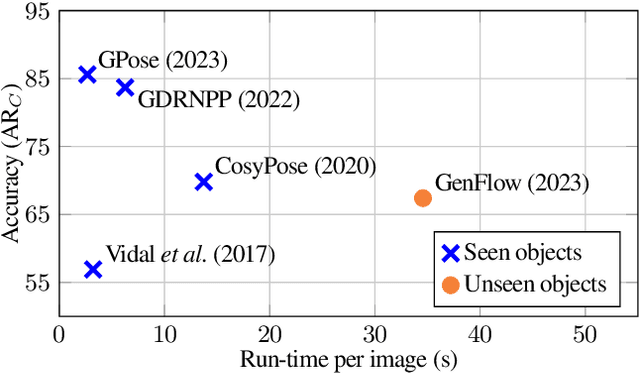

We present the evaluation methodology, datasets and results of the BOP Challenge 2023, the fifth in a series of public competitions organized to capture the state of the art in model-based 6D object pose estimation from an RGB/RGB-D image and related tasks. Besides the three tasks from 2022 (model-based 2D detection, 2D segmentation, and 6D localization of objects seen during training), the 2023 challenge introduced new variants of these tasks focused on objects unseen during training. In the new tasks, methods were required to learn new objects during a short onboarding stage (max 5 minutes, 1 GPU) from provided 3D object models. The best 2023 method for 6D localization of unseen objects (GenFlow) notably reached the accuracy of the best 2020 method for seen objects (CosyPose), although being noticeably slower. The best 2023 method for seen objects (GPose) achieved a moderate accuracy improvement but a significant 43% run-time improvement compared to the best 2022 counterpart (GDRNPP). Since 2017, the accuracy of 6D localization of seen objects has improved by more than 50% (from 56.9 to 85.6 AR_C). The online evaluation system stays open and is available at: http://bop.felk.cvut.cz/.
FoundPose: Unseen Object Pose Estimation with Foundation Features
Nov 30, 2023



We propose FoundPose, a method for 6D pose estimation of unseen rigid objects from a single RGB image. The method assumes that 3D models of the objects are available but does not require any object-specific training. This is achieved by building upon DINOv2, a recent vision foundation model with impressive generalization capabilities. An online pose estimation stage is supported by a minimal object representation that is built during a short onboarding stage from DINOv2 patch features extracted from rendered object templates. Given a query image with an object segmentation mask, FoundPose first rapidly retrieves a handful of similarly looking templates by a DINOv2-based bag-of-words approach. Pose hypotheses are then generated from 2D-3D correspondences established by matching DINOv2 patch features between the query image and a retrieved template, and finally optimized by featuremetric refinement. The method can handle diverse objects, including challenging ones with symmetries and without any texture, and noticeably outperforms existing RGB methods for coarse pose estimation in both accuracy and speed on the standard BOP benchmark. With the featuremetric and additional MegaPose refinement, which are demonstrated complementary, the method outperforms all RGB competitors. Source code is at: evinpinar.github.io/foundpose.
CNOS: A Strong Baseline for CAD-based Novel Object Segmentation
Aug 03, 2023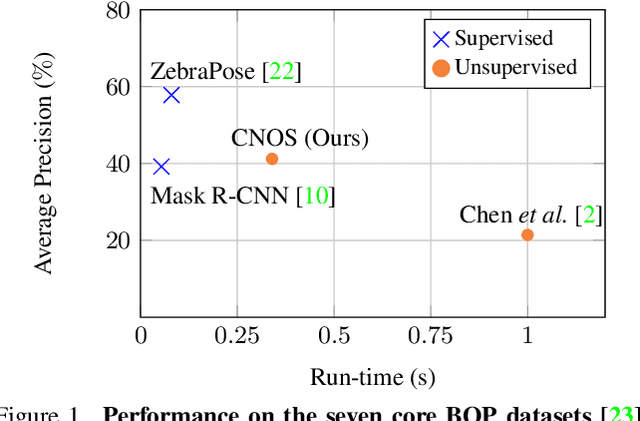



We propose a simple three-stage approach to segment unseen objects in RGB images using their CAD models. Leveraging recent powerful foundation models, DINOv2 and Segment Anything, we create descriptors and generate proposals, including binary masks for a given input RGB image. By matching proposals with reference descriptors created from CAD models, we achieve precise object ID assignment along with modal masks. We experimentally demonstrate that our method achieves state-of-the-art results in CAD-based novel object segmentation, surpassing existing approaches on the seven core datasets of the BOP challenge by 19.8% AP using the same BOP evaluation protocol. Our source code is available at https://github.com/nv-nguyen/cnos.