 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBOP Challenge 2024 on Model-Based and Model-Free 6D Object Pose Estimation
Apr 03, 2025We present the evaluation methodology, datasets and results of the BOP Challenge 2024, the sixth in a series of public competitions organized to capture the state of the art in 6D object pose estimation and related tasks. In 2024, our goal was to transition BOP from lab-like setups to real-world scenarios. First, we introduced new model-free tasks, where no 3D object models are available and methods need to onboard objects just from provided reference videos. Second, we defined a new, more practical 6D object detection task where identities of objects visible in a test image are not provided as input. Third, we introduced new BOP-H3 datasets recorded with high-resolution sensors and AR/VR headsets, closely resembling real-world scenarios. BOP-H3 include 3D models and onboarding videos to support both model-based and model-free tasks. Participants competed on seven challenge tracks, each defined by a task, object onboarding setup, and dataset group. Notably, the best 2024 method for model-based 6D localization of unseen objects (FreeZeV2.1) achieves 22% higher accuracy on BOP-Classic-Core than the best 2023 method (GenFlow), and is only 4% behind the best 2023 method for seen objects (GPose2023) although being significantly slower (24.9 vs 2.7s per image). A more practical 2024 method for this task is Co-op which takes only 0.8s per image and is 25X faster and 13% more accurate than GenFlow. Methods have a similar ranking on 6D detection as on 6D localization but higher run time. On model-based 2D detection of unseen objects, the best 2024 method (MUSE) achieves 21% relative improvement compared to the best 2023 method (CNOS). However, the 2D detection accuracy for unseen objects is still noticealy (-53%) behind the accuracy for seen objects (GDet2023). The online evaluation system stays open and is available at http://bop.felk.cvut.cz/
BOP Challenge 2023 on Detection, Segmentation and Pose Estimation of Seen and Unseen Rigid Objects
Mar 14, 2024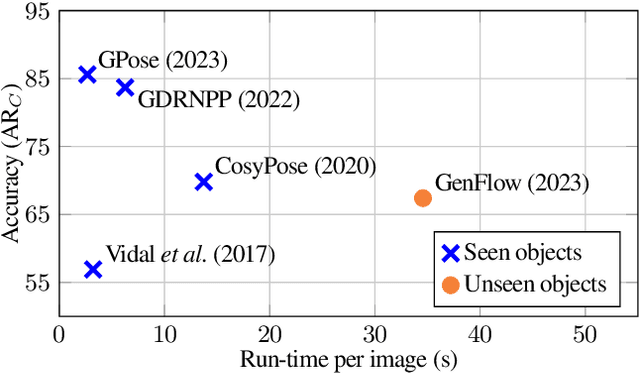

We present the evaluation methodology, datasets and results of the BOP Challenge 2023, the fifth in a series of public competitions organized to capture the state of the art in model-based 6D object pose estimation from an RGB/RGB-D image and related tasks. Besides the three tasks from 2022 (model-based 2D detection, 2D segmentation, and 6D localization of objects seen during training), the 2023 challenge introduced new variants of these tasks focused on objects unseen during training. In the new tasks, methods were required to learn new objects during a short onboarding stage (max 5 minutes, 1 GPU) from provided 3D object models. The best 2023 method for 6D localization of unseen objects (GenFlow) notably reached the accuracy of the best 2020 method for seen objects (CosyPose), although being noticeably slower. The best 2023 method for seen objects (GPose) achieved a moderate accuracy improvement but a significant 43% run-time improvement compared to the best 2022 counterpart (GDRNPP). Since 2017, the accuracy of 6D localization of seen objects has improved by more than 50% (from 56.9 to 85.6 AR_C). The online evaluation system stays open and is available at: http://bop.felk.cvut.cz/.
BOP Challenge 2022 on Detection, Segmentation and Pose Estimation of Specific Rigid Objects
Feb 25, 2023We present the evaluation methodology, datasets and results of the BOP Challenge 2022, the fourth in a series of public competitions organized with the goal to capture the status quo in the field of 6D object pose estimation from an RGB/RGB-D image. In 2022, we witnessed another significant improvement in the pose estimation accuracy -- the state of the art, which was 56.9 AR$_C$ in 2019 (Vidal et al.) and 69.8 AR$_C$ in 2020 (CosyPose), moved to new heights of 83.7 AR$_C$ (GDRNPP). Out of 49 pose estimation methods evaluated since 2019, the top 18 are from 2022. Methods based on point pair features, which were introduced in 2010 and achieved competitive results even in 2020, are now clearly outperformed by deep learning methods. The synthetic-to-real domain gap was again significantly reduced, with 82.7 AR$_C$ achieved by GDRNPP trained only on synthetic images from BlenderProc. The fastest variant of GDRNPP reached 80.5 AR$_C$ with an average time per image of 0.23s. Since most of the recent methods for 6D object pose estimation begin by detecting/segmenting objects, we also started evaluating 2D object detection and segmentation performance based on the COCO metrics. Compared to the Mask R-CNN results from CosyPose in 2020, detection improved from 60.3 to 77.3 AP$_C$ and segmentation from 40.5 to 58.7 AP$_C$. The online evaluation system stays open and is available at: \href{http://bop.felk.cvut.cz/}{bop.felk.cvut.cz}.
BOP Challenge 2020 on 6D Object Localization
Oct 13, 2020
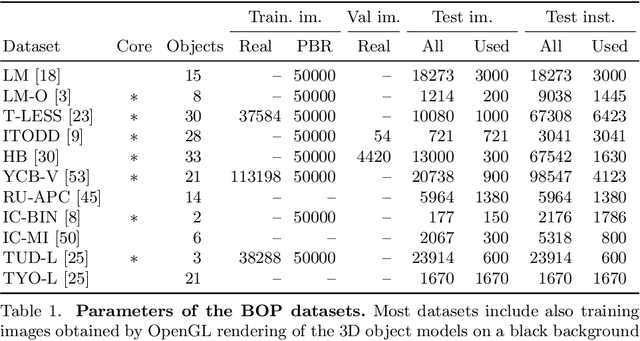
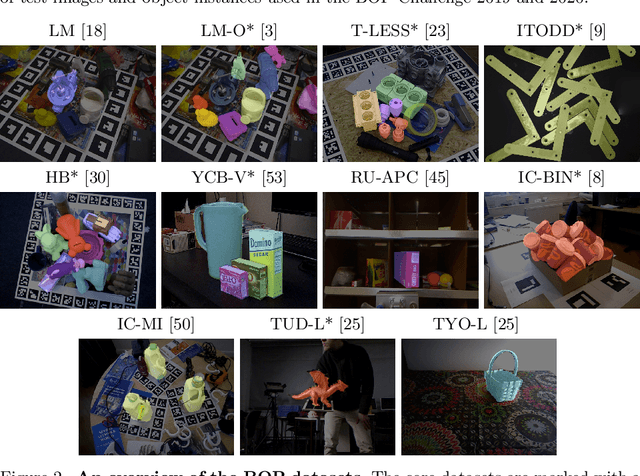
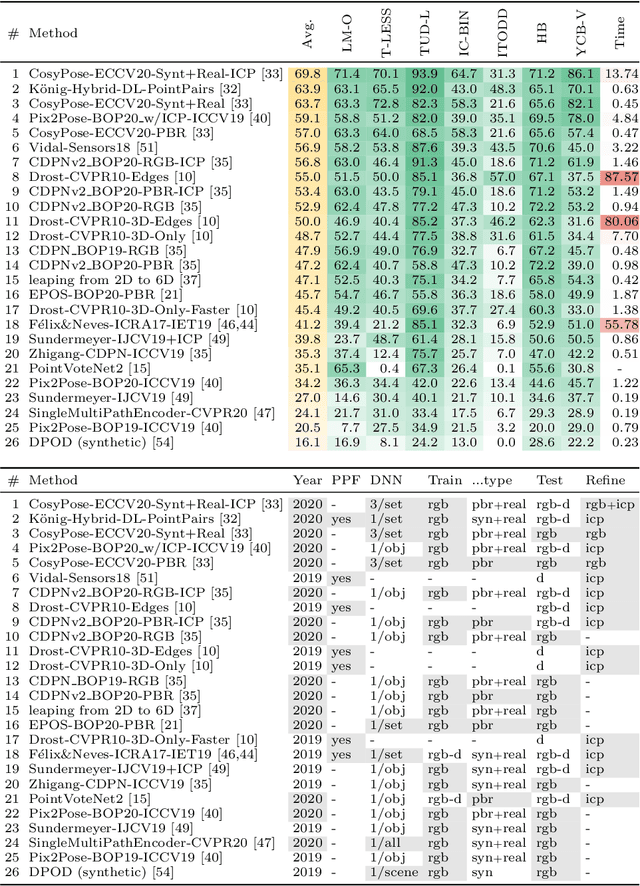
This paper presents the evaluation methodology, datasets, and results of the BOP Challenge 2020, the third in a series of public competitions organized with the goal to capture the status quo in the field of 6D object pose estimation from an RGB-D image. In 2020, to reduce the domain gap between synthetic training and real test RGB images, the participants were provided 350K photorealistic training images generated by BlenderProc4BOP, a new open-source and light-weight physically-based renderer (PBR) and procedural data generator. Methods based on deep neural networks have finally caught up with methods based on point pair features, which were dominating previous editions of the challenge. Although the top-performing methods rely on RGB-D image channels, strong results were achieved when only RGB channels were used at both training and test time - out of the 26 evaluated methods, the third method was trained on RGB channels of PBR and real images, while the fifth on RGB channels of PBR images only. Strong data augmentation was identified as a key component of the top-performing CosyPose method, and the photorealism of PBR images was demonstrated effective despite the augmentation. The online evaluation system stays open and is available on the project website: bop.felk.cvut.cz.