 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShapeR: Robust Conditional 3D Shape Generation from Casual Captures
Jan 16, 2026Recent advances in 3D shape generation have achieved impressive results, but most existing methods rely on clean, unoccluded, and well-segmented inputs. Such conditions are rarely met in real-world scenarios. We present ShapeR, a novel approach for conditional 3D object shape generation from casually captured sequences. Given an image sequence, we leverage off-the-shelf visual-inertial SLAM, 3D detection algorithms, and vision-language models to extract, for each object, a set of sparse SLAM points, posed multi-view images, and machine-generated captions. A rectified flow transformer trained to effectively condition on these modalities then generates high-fidelity metric 3D shapes. To ensure robustness to the challenges of casually captured data, we employ a range of techniques including on-the-fly compositional augmentations, a curriculum training scheme spanning object- and scene-level datasets, and strategies to handle background clutter. Additionally, we introduce a new evaluation benchmark comprising 178 in-the-wild objects across 7 real-world scenes with geometry annotations. Experiments show that ShapeR significantly outperforms existing approaches in this challenging setting, achieving an improvement of 2.7x in Chamfer distance compared to state of the art.
ART: Articulated Reconstruction Transformer
Dec 16, 2025We introduce ART, Articulated Reconstruction Transformer -- a category-agnostic, feed-forward model that reconstructs complete 3D articulated objects from only sparse, multi-state RGB images. Previous methods for articulated object reconstruction either rely on slow optimization with fragile cross-state correspondences or use feed-forward models limited to specific object categories. In contrast, ART treats articulated objects as assemblies of rigid parts, formulating reconstruction as part-based prediction. Our newly designed transformer architecture maps sparse image inputs to a set of learnable part slots, from which ART jointly decodes unified representations for individual parts, including their 3D geometry, texture, and explicit articulation parameters. The resulting reconstructions are physically interpretable and readily exportable for simulation. Trained on a large-scale, diverse dataset with per-part supervision, and evaluated across diverse benchmarks, ART achieves significant improvements over existing baselines and establishes a new state of the art for articulated object reconstruction from image inputs.
Benchmarking Egocentric Visual-Inertial SLAM at City Scale
Sep 30, 2025Precise 6-DoF simultaneous localization and mapping (SLAM) from onboard sensors is critical for wearable devices capturing egocentric data, which exhibits specific challenges, such as a wider diversity of motions and viewpoints, prevalent dynamic visual content, or long sessions affected by time-varying sensor calibration. While recent progress on SLAM has been swift, academic research is still driven by benchmarks that do not reflect these challenges or do not offer sufficiently accurate ground truth poses. In this paper, we introduce a new dataset and benchmark for visual-inertial SLAM with egocentric, multi-modal data. We record hours and kilometers of trajectories through a city center with glasses-like devices equipped with various sensors. We leverage surveying tools to obtain control points as indirect pose annotations that are metric, centimeter-accurate, and available at city scale. This makes it possible to evaluate extreme trajectories that involve walking at night or traveling in a vehicle. We show that state-of-the-art systems developed by academia are not robust to these challenges and we identify components that are responsible for this. In addition, we design tracks with different levels of difficulty to ease in-depth analysis and evaluation of less mature approaches. The dataset and benchmark are available at https://www.lamaria.ethz.ch.
DGS-LRM: Real-Time Deformable 3D Gaussian Reconstruction From Monocular Videos
Jun 11, 2025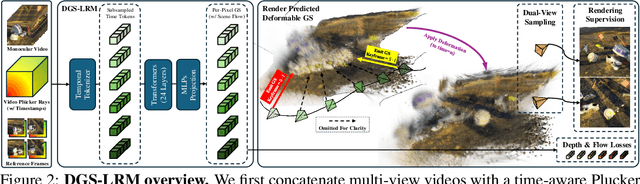
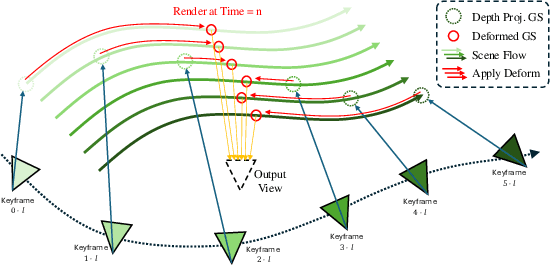
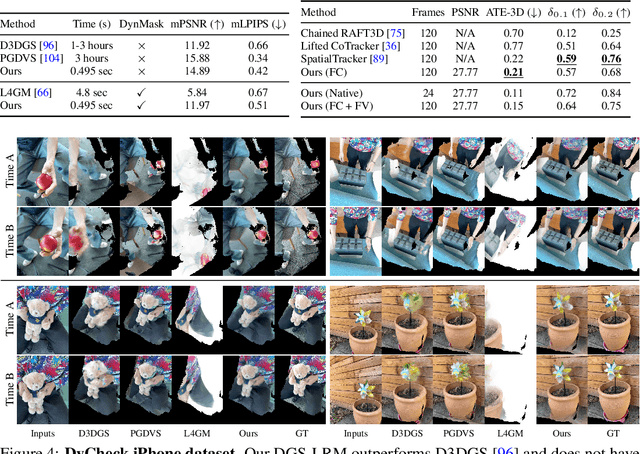
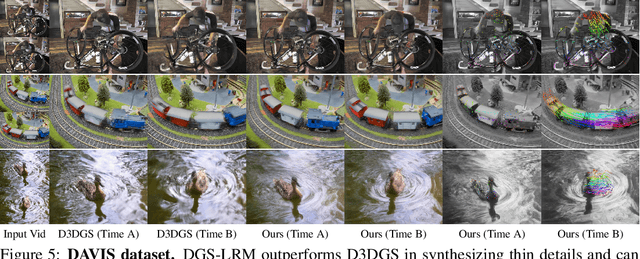
We introduce the Deformable Gaussian Splats Large Reconstruction Model (DGS-LRM), the first feed-forward method predicting deformable 3D Gaussian splats from a monocular posed video of any dynamic scene. Feed-forward scene reconstruction has gained significant attention for its ability to rapidly create digital replicas of real-world environments. However, most existing models are limited to static scenes and fail to reconstruct the motion of moving objects. Developing a feed-forward model for dynamic scene reconstruction poses significant challenges, including the scarcity of training data and the need for appropriate 3D representations and training paradigms. To address these challenges, we introduce several key technical contributions: an enhanced large-scale synthetic dataset with ground-truth multi-view videos and dense 3D scene flow supervision; a per-pixel deformable 3D Gaussian representation that is easy to learn, supports high-quality dynamic view synthesis, and enables long-range 3D tracking; and a large transformer network that achieves real-time, generalizable dynamic scene reconstruction. Extensive qualitative and quantitative experiments demonstrate that DGS-LRM achieves dynamic scene reconstruction quality comparable to optimization-based methods, while significantly outperforming the state-of-the-art predictive dynamic reconstruction method on real-world examples. Its predicted physically grounded 3D deformation is accurate and can readily adapt for long-range 3D tracking tasks, achieving performance on par with state-of-the-art monocular video 3D tracking methods.
4DGT: Learning a 4D Gaussian Transformer Using Real-World Monocular Videos
Jun 09, 2025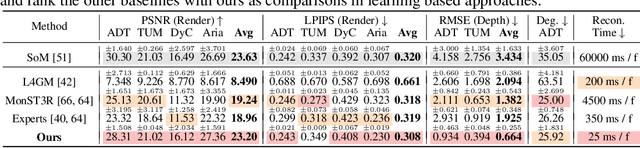
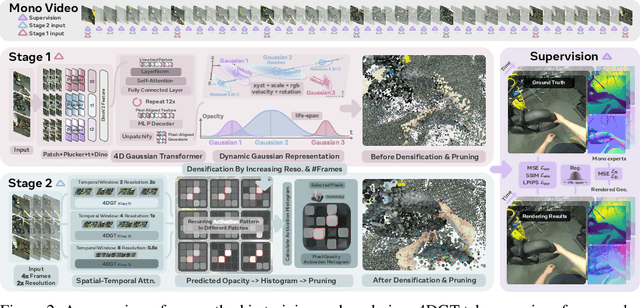

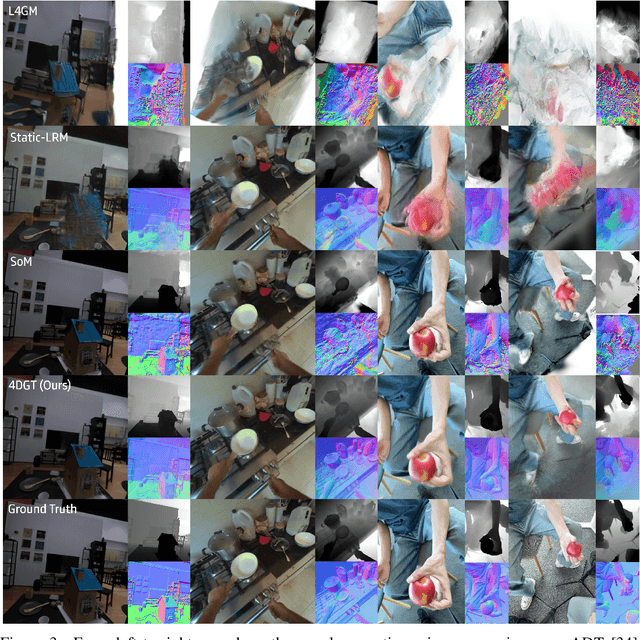
We propose 4DGT, a 4D Gaussian-based Transformer model for dynamic scene reconstruction, trained entirely on real-world monocular posed videos. Using 4D Gaussian as an inductive bias, 4DGT unifies static and dynamic components, enabling the modeling of complex, time-varying environments with varying object lifespans. We proposed a novel density control strategy in training, which enables our 4DGT to handle longer space-time input and remain efficient rendering at runtime. Our model processes 64 consecutive posed frames in a rolling-window fashion, predicting consistent 4D Gaussians in the scene. Unlike optimization-based methods, 4DGT performs purely feed-forward inference, reducing reconstruction time from hours to seconds and scaling effectively to long video sequences. Trained only on large-scale monocular posed video datasets, 4DGT can outperform prior Gaussian-based networks significantly in real-world videos and achieve on-par accuracy with optimization-based methods on cross-domain videos. Project page: https://4dgt.github.io
Photoreal Scene Reconstruction from an Egocentric Device
Jun 04, 2025In this paper, we investigate the challenges associated with using egocentric devices to photorealistic reconstruct the scene in high dynamic range. Existing methodologies typically assume using frame-rate 6DoF pose estimated from the device's visual-inertial odometry system, which may neglect crucial details necessary for pixel-accurate reconstruction. This study presents two significant findings. Firstly, in contrast to mainstream work treating RGB camera as global shutter frame-rate camera, we emphasize the importance of employing visual-inertial bundle adjustment (VIBA) to calibrate the precise timestamps and movement of the rolling shutter RGB sensing camera in a high frequency trajectory format, which ensures an accurate calibration of the physical properties of the rolling-shutter camera. Secondly, we incorporate a physical image formation model based into Gaussian Splatting, which effectively addresses the sensor characteristics, including the rolling-shutter effect of RGB cameras and the dynamic ranges measured by sensors. Our proposed formulation is applicable to the widely-used variants of Gaussian Splats representation. We conduct a comprehensive evaluation of our pipeline using the open-source Project Aria device under diverse indoor and outdoor lighting conditions, and further validate it on a Meta Quest3 device. Across all experiments, we observe a consistent visual enhancement of +1 dB in PSNR by incorporating VIBA, with an additional +1 dB achieved through our proposed image formation model. Our complete implementation, evaluation datasets, and recording profile are available at http://www.projectaria.com/photoreal-reconstruction/
Reading Recognition in the Wild
May 30, 2025To enable egocentric contextual AI in always-on smart glasses, it is crucial to be able to keep a record of the user's interactions with the world, including during reading. In this paper, we introduce a new task of reading recognition to determine when the user is reading. We first introduce the first-of-its-kind large-scale multimodal Reading in the Wild dataset, containing 100 hours of reading and non-reading videos in diverse and realistic scenarios. We then identify three modalities (egocentric RGB, eye gaze, head pose) that can be used to solve the task, and present a flexible transformer model that performs the task using these modalities, either individually or combined. We show that these modalities are relevant and complementary to the task, and investigate how to efficiently and effectively encode each modality. Additionally, we show the usefulness of this dataset towards classifying types of reading, extending current reading understanding studies conducted in constrained settings to larger scale, diversity and realism. Code, model, and data will be public.
Monocular Online Reconstruction with Enhanced Detail Preservation
May 14, 2025We propose an online 3D Gaussian-based dense mapping framework for photorealistic details reconstruction from a monocular image stream. Our approach addresses two key challenges in monocular online reconstruction: distributing Gaussians without relying on depth maps and ensuring both local and global consistency in the reconstructed maps. To achieve this, we introduce two key modules: the Hierarchical Gaussian Management Module for effective Gaussian distribution and the Global Consistency Optimization Module for maintaining alignment and coherence at all scales. In addition, we present the Multi-level Occupancy Hash Voxels (MOHV), a structure that regularizes Gaussians for capturing details across multiple levels of granularity. MOHV ensures accurate reconstruction of both fine and coarse geometries and textures, preserving intricate details while maintaining overall structural integrity. Compared to state-of-the-art RGB-only and even RGB-D methods, our framework achieves superior reconstruction quality with high computational efficiency. Moreover, it integrates seamlessly with various tracking systems, ensuring generality and scalability.
LIRM: Large Inverse Rendering Model for Progressive Reconstruction of Shape, Materials and View-dependent Radiance Fields
Apr 28, 2025We present Large Inverse Rendering Model (LIRM), a transformer architecture that jointly reconstructs high-quality shape, materials, and radiance fields with view-dependent effects in less than a second. Our model builds upon the recent Large Reconstruction Models (LRMs) that achieve state-of-the-art sparse-view reconstruction quality. However, existing LRMs struggle to reconstruct unseen parts accurately and cannot recover glossy appearance or generate relightable 3D contents that can be consumed by standard Graphics engines. To address these limitations, we make three key technical contributions to build a more practical multi-view 3D reconstruction framework. First, we introduce an update model that allows us to progressively add more input views to improve our reconstruction. Second, we propose a hexa-plane neural SDF representation to better recover detailed textures, geometry and material parameters. Third, we develop a novel neural directional-embedding mechanism to handle view-dependent effects. Trained on a large-scale shape and material dataset with a tailored coarse-to-fine training scheme, our model achieves compelling results. It compares favorably to optimization-based dense-view inverse rendering methods in terms of geometry and relighting accuracy, while requiring only a fraction of the inference time.
Imaging for All-Day Wearable Smart Glasses
Apr 17, 2025In recent years smart glasses technology has rapidly advanced, opening up entirely new areas for mobile computing. We expect future smart glasses will need to be all-day wearable, adopting a small form factor to meet the requirements of volume, weight, fashionability and social acceptability, which puts significant constraints on the space of possible solutions. Additional challenges arise due to the fact that smart glasses are worn in arbitrary environments while their wearer moves and performs everyday activities. In this paper, we systematically analyze the space of imaging from smart glasses and derive several fundamental limits that govern this imaging domain. We discuss the impact of these limits on achievable image quality and camera module size -- comparing in particular to related devices such as mobile phones. We then propose a novel distributed imaging approach that allows to minimize the size of the individual camera modules when compared to a standard monolithic camera design. Finally, we demonstrate the properties of this novel approach in a series of experiments using synthetic data as well as images captured with two different prototype implementations.