 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNatural Human Motion Recovery by Aligning High-Order Temporal Dynamics from Monocular Videos
May 26, 2026Human motion recovered from monocular videos often appears overly smooth or dynamically inconsistent, even when joint positions are numerically accurate. We observe that this limitation stems from the absence of reliable high-order temporal cues -- velocity and acceleration -- which are essential for reconstructing motion that exhibits realistic momentum, timing, and high-frequency detail. We introduce HTD-Refine, a post-processing framework that augments existing Human Motion Recovery (HMR) pipelines using explicitly estimated high-order temporal dynamics. At the core of our system is PVA-Net, a temporal transformer that infers per-joint 2D positions, 3D velocities, and 3D accelerations directly from a monocular video. These predicted dynamics serve as soft yet informative constraints in a global optimization procedure that refines world-space trajectories, significantly reducing jitter, suppressing over-smoothing, and restoring physically plausible motion. Extensive experiments on challenging in-the-wild benchmarks show that HTD-Refine consistently improves state-of-the-art HMR methods, yielding more accurate global trajectories and substantially more natural motion dynamics. Our results highlight the critical role of high-order temporal modeling in advancing monocular human motion recovery.
Imagine2Real: Towards Zero-shot Humanoid-Object Interaction via Video Generative Priors
May 21, 2026Whole-body Humanoid-Object Interaction (HOI) is bottlenecked by the scarcity of high-fidelity 3D data. While video generative priors offer a promising alternative, existing methods suffer from \textit{Representation Misalignment} due to their reliance on geometric priors (e.g., explicit CAD models), and \textit{Retargeting Complexity} arising from intensive morphing and morphological mismatch. We propose Imagine2Real, a zero-shot HOI framework for flexible, geometry-free interaction. To resolve misalignment, we formulate robot and object motions as unified 4D point trajectories. To overcome retargeting complexity, our Keypoints Tracker tracks only sparse critical points (base, hands, and object), entirely bypassing the error-amplifying retargeting process. To maintain natural gaits despite these sparse signals, we utilize the latent space of a Behavior Foundation Model (BFM) as the tracker's search domain. Using a progressive training strategy, Imagine2Real learns robust behaviors with simple tracking rewards, enabling zero-shot physical deployment within a motion capture(mocap) system.
Contact Matrix: Enhancing Dance Motion Synthesis with Precise Interaction Modeling
May 06, 2026Generating realistic reactive motions, in which one person reacts to the fixed motions of others, is challenging due to strict interaction constraints and a limited feasible solution space. This paper focuses on a typical scenario: duet dance, where high-quality data is scarce, motion patterns are complex, and the details of human interactions are both intricate and abundant. To tackle these challenges, we propose a novel two-stage framework. In the first stage, we introduce a motion VQ-VAE with separate body-part encoders and a joint decoder, enabling specialized codebooks to enhance representation capacity while dynamically modeling dependencies across body parts during decoding, thereby preventing inconsistencies in the generated motions. In the second stage, we propose a contact-aware diffusion model for reactive motion generation that jointly generates motion and a contact matrix between individuals, enabling explicit interaction modeling and providing guidance toward more precise and constrained interaction dynamics during sampling. Experiments show that our method outperforms Duolando with lower $\text{FID}_k$ (8.89 vs. 25.30) and $\text{FID}_{cd}$ (8.01 vs. 9.97), as well as a higher BED (0.4606 vs. 0.2858), indicating improved interaction fidelity and rhythmic synchronization.
Habitat-GS: A High-Fidelity Navigation Simulator with Dynamic Gaussian Splatting
Apr 14, 2026Training embodied AI agents depends critically on the visual fidelity of simulation environments and the ability to model dynamic humans. Current simulators rely on mesh-based rasterization with limited visual realism, and their support for dynamic human avatars, where available, is constrained to mesh representations, hindering agent generalization to human-populated real-world scenarios. We present Habitat-GS, a navigation-centric embodied AI simulator extended from Habitat-Sim that integrates 3D Gaussian Splatting scene rendering and drivable gaussian avatars while maintaining full compatibility with the Habitat ecosystem. Our system implements a 3DGS renderer for real-time photorealistic rendering and supports scalable 3DGS asset import from diverse sources. For dynamic human modeling, we introduce a gaussian avatar module that enables each avatar to simultaneously serve as a photorealistic visual entity and an effective navigation obstacle, allowing agents to learn human-aware behaviors in realistic settings. Experiments on point-goal navigation demonstrate that agents trained on 3DGS scenes achieve stronger cross-domain generalization, with mixed-domain training being the most effective strategy. Evaluations on avatar-aware navigation further confirm that gaussian avatars enable effective human-aware navigation. Finally, performance benchmarks validate the system's scalability across varying scene complexity and avatar counts.
Scal3R: Scalable Test-Time Training for Large-Scale 3D Reconstruction
Apr 09, 2026This paper addresses the task of large-scale 3D scene reconstruction from long video sequences. Recent feed-forward reconstruction models have shown promising results by directly regressing 3D geometry from RGB images without explicit 3D priors or geometric constraints. However, these methods often struggle to maintain reconstruction accuracy and consistency over long sequences due to limited memory capacity and the inability to effectively capture global contextual cues. In contrast, humans can naturally exploit the global understanding of the scene to inform local perception. Motivated by this, we propose a novel neural global context representation that efficiently compresses and retains long-range scene information, enabling the model to leverage extensive contextual cues for enhanced reconstruction accuracy and consistency. The context representation is realized through a set of lightweight neural sub-networks that are rapidly adapted during test time via self-supervised objectives, which substantially increases memory capacity without incurring significant computational overhead. The experiments on multiple large-scale benchmarks, including the KITTI Odometry~\cite{Geiger2012CVPR} and Oxford Spires~\cite{tao2025spires} datasets, demonstrate the effectiveness of our approach in handling ultra-large scenes, achieving leading pose accuracy and state-of-the-art 3D reconstruction accuracy while maintaining efficiency. Code is available at https://zju3dv.github.io/scal3r.
InfiniDepth: Arbitrary-Resolution and Fine-Grained Depth Estimation with Neural Implicit Fields
Jan 06, 2026Existing depth estimation methods are fundamentally limited to predicting depth on discrete image grids. Such representations restrict their scalability to arbitrary output resolutions and hinder the geometric detail recovery. This paper introduces InfiniDepth, which represents depth as neural implicit fields. Through a simple yet effective local implicit decoder, we can query depth at continuous 2D coordinates, enabling arbitrary-resolution and fine-grained depth estimation. To better assess our method's capabilities, we curate a high-quality 4K synthetic benchmark from five different games, spanning diverse scenes with rich geometric and appearance details. Extensive experiments demonstrate that InfiniDepth achieves state-of-the-art performance on both synthetic and real-world benchmarks across relative and metric depth estimation tasks, particularly excelling in fine-detail regions. It also benefits the task of novel view synthesis under large viewpoint shifts, producing high-quality results with fewer holes and artifacts.
Split4D: Decomposed 4D Scene Reconstruction Without Video Segmentation
Dec 28, 2025This paper addresses the problem of decomposed 4D scene reconstruction from multi-view videos. Recent methods achieve this by lifting video segmentation results to a 4D representation through differentiable rendering techniques. Therefore, they heavily rely on the quality of video segmentation maps, which are often unstable, leading to unreliable reconstruction results. To overcome this challenge, our key idea is to represent the decomposed 4D scene with the Freetime FeatureGS and design a streaming feature learning strategy to accurately recover it from per-image segmentation maps, eliminating the need for video segmentation. Freetime FeatureGS models the dynamic scene as a set of Gaussian primitives with learnable features and linear motion ability, allowing them to move to neighboring regions over time. We apply a contrastive loss to Freetime FeatureGS, forcing primitive features to be close or far apart based on whether their projections belong to the same instance in the 2D segmentation map. As our Gaussian primitives can move across time, it naturally extends the feature learning to the temporal dimension, achieving 4D segmentation. Furthermore, we sample observations for training in a temporally ordered manner, enabling the streaming propagation of features over time and effectively avoiding local minima during the optimization process. Experimental results on several datasets show that the reconstruction quality of our method outperforms recent methods by a large margin.
SpatialTree: How Spatial Abilities Branch Out in MLLMs
Dec 23, 2025Cognitive science suggests that spatial ability develops progressively-from perception to reasoning and interaction. Yet in multimodal LLMs (MLLMs), this hierarchy remains poorly understood, as most studies focus on a narrow set of tasks. We introduce SpatialTree, a cognitive-science-inspired hierarchy that organizes spatial abilities into four levels: low-level perception (L1), mental mapping (L2), simulation (L3), and agentic competence (L4). Based on this taxonomy, we construct the first capability-centric hierarchical benchmark, thoroughly evaluating mainstream MLLMs across 27 sub-abilities. The evaluation results reveal a clear structure: L1 skills are largely orthogonal, whereas higher-level skills are strongly correlated, indicating increasing interdependency. Through targeted supervised fine-tuning, we uncover a surprising transfer dynamic-negative transfer within L1, but strong cross-level transfer from low- to high-level abilities with notable synergy. Finally, we explore how to improve the entire hierarchy. We find that naive RL that encourages extensive "thinking" is unreliable: it helps complex reasoning but hurts intuitive perception. We propose a simple auto-think strategy that suppresses unnecessary deliberation, enabling RL to consistently improve performance across all levels. By building SpatialTree, we provide a proof-of-concept framework for understanding and systematically scaling spatial abilities in MLLMs.
StreamingTalker: Audio-driven 3D Facial Animation with Autoregressive Diffusion Model
Nov 19, 2025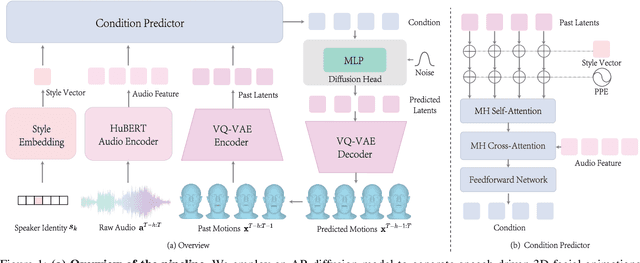
This paper focuses on the task of speech-driven 3D facial animation, which aims to generate realistic and synchronized facial motions driven by speech inputs. Recent methods have employed audio-conditioned diffusion models for 3D facial animation, achieving impressive results in generating expressive and natural animations. However, these methods process the whole audio sequences in a single pass, which poses two major challenges: they tend to perform poorly when handling audio sequences that exceed the training horizon and will suffer from significant latency when processing long audio inputs. To address these limitations, we propose a novel autoregressive diffusion model that processes input audio in a streaming manner. This design ensures flexibility with varying audio lengths and achieves low latency independent of audio duration. Specifically, we select a limited number of past frames as historical motion context and combine them with the audio input to create a dynamic condition. This condition guides the diffusion process to iteratively generate facial motion frames, enabling real-time synthesis with high-quality results. Additionally, we implemented a real-time interactive demo, highlighting the effectiveness and efficiency of our approach. We will release the code at https://zju3dv.github.io/StreamingTalker/.
UniVerse: Unleashing the Scene Prior of Video Diffusion Models for Robust Radiance Field Reconstruction
Oct 02, 2025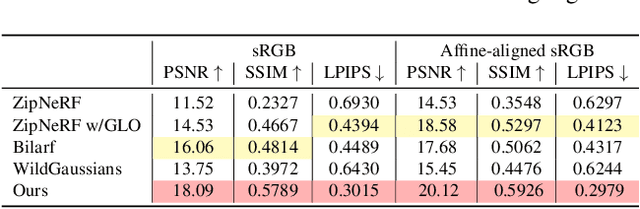
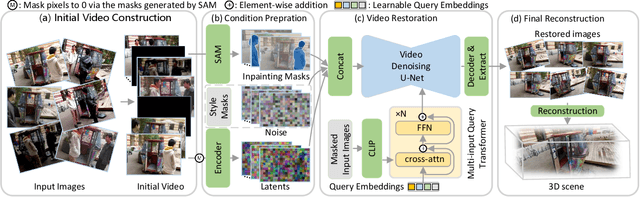
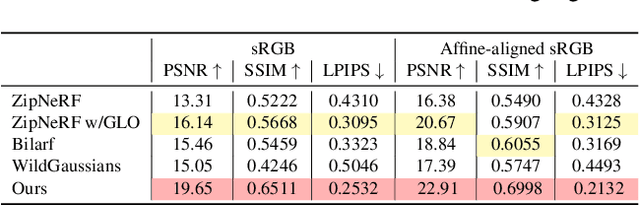
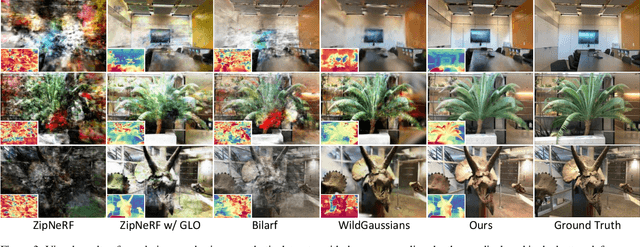
This paper tackles the challenge of robust reconstruction, i.e., the task of reconstructing a 3D scene from a set of inconsistent multi-view images. Some recent works have attempted to simultaneously remove image inconsistencies and perform reconstruction by integrating image degradation modeling into neural 3D scene representations.However, these methods rely heavily on dense observations for robustly optimizing model parameters.To address this issue, we propose to decouple robust reconstruction into two subtasks: restoration and reconstruction, which naturally simplifies the optimization process.To this end, we introduce UniVerse, a unified framework for robust reconstruction based on a video diffusion model. Specifically, UniVerse first converts inconsistent images into initial videos, then uses a specially designed video diffusion model to restore them into consistent images, and finally reconstructs the 3D scenes from these restored images.Compared with case-by-case per-view degradation modeling, the diffusion model learns a general scene prior from large-scale data, making it applicable to diverse image inconsistencies.Extensive experiments on both synthetic and real-world datasets demonstrate the strong generalization capability and superior performance of our method in robust reconstruction. Moreover, UniVerse can control the style of the reconstructed 3D scene. Project page: https://jin-cao-tma.github.io/UniVerse.github.io/