 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCausal World Modeling for Robot Control
Jan 29, 2026This work highlights that video world modeling, alongside vision-language pre-training, establishes a fresh and independent foundation for robot learning. Intuitively, video world models provide the ability to imagine the near future by understanding the causality between actions and visual dynamics. Inspired by this, we introduce LingBot-VA, an autoregressive diffusion framework that learns frame prediction and policy execution simultaneously. Our model features three carefully crafted designs: (1) a shared latent space, integrating vision and action tokens, driven by a Mixture-of-Transformers (MoT) architecture, (2) a closed-loop rollout mechanism, allowing for ongoing acquisition of environmental feedback with ground-truth observations, (3) an asynchronous inference pipeline, parallelizing action prediction and motor execution to support efficient control. We evaluate our model on both simulation benchmarks and real-world scenarios, where it shows significant promise in long-horizon manipulation, data efficiency in post-training, and strong generalizability to novel configurations. The code and model are made publicly available to facilitate the community.
Advancing Open-source World Models
Jan 28, 2026We present LingBot-World, an open-sourced world simulator stemming from video generation. Positioned as a top-tier world model, LingBot-World offers the following features. (1) It maintains high fidelity and robust dynamics in a broad spectrum of environments, including realism, scientific contexts, cartoon styles, and beyond. (2) It enables a minute-level horizon while preserving contextual consistency over time, which is also known as "long-term memory". (3) It supports real-time interactivity, achieving a latency of under 1 second when producing 16 frames per second. We provide public access to the code and model in an effort to narrow the divide between open-source and closed-source technologies. We believe our release will empower the community with practical applications across areas like content creation, gaming, and robot learning.
A Pragmatic VLA Foundation Model
Jan 26, 2026Offering great potential in robotic manipulation, a capable Vision-Language-Action (VLA) foundation model is expected to faithfully generalize across tasks and platforms while ensuring cost efficiency (e.g., data and GPU hours required for adaptation). To this end, we develop LingBot-VLA with around 20,000 hours of real-world data from 9 popular dual-arm robot configurations. Through a systematic assessment on 3 robotic platforms, each completing 100 tasks with 130 post-training episodes per task, our model achieves clear superiority over competitors, showcasing its strong performance and broad generalizability. We have also built an efficient codebase, which delivers a throughput of 261 samples per second per GPU with an 8-GPU training setup, representing a 1.5~2.8$\times$ (depending on the relied VLM base model) speedup over existing VLA-oriented codebases. The above features ensure that our model is well-suited for real-world deployment. To advance the field of robot learning, we provide open access to the code, base model, and benchmark data, with a focus on enabling more challenging tasks and promoting sound evaluation standards.
Masked Depth Modeling for Spatial Perception
Jan 25, 2026Spatial visual perception is a fundamental requirement in physical-world applications like autonomous driving and robotic manipulation, driven by the need to interact with 3D environments. Capturing pixel-aligned metric depth using RGB-D cameras would be the most viable way, yet it usually faces obstacles posed by hardware limitations and challenging imaging conditions, especially in the presence of specular or texture-less surfaces. In this work, we argue that the inaccuracies from depth sensors can be viewed as "masked" signals that inherently reflect underlying geometric ambiguities. Building on this motivation, we present LingBot-Depth, a depth completion model which leverages visual context to refine depth maps through masked depth modeling and incorporates an automated data curation pipeline for scalable training. It is encouraging to see that our model outperforms top-tier RGB-D cameras in terms of both depth precision and pixel coverage. Experimental results on a range of downstream tasks further suggest that LingBot-Depth offers an aligned latent representation across RGB and depth modalities. We release the code, checkpoint, and 3M RGB-depth pairs (including 2M real data and 1M simulated data) to the community of spatial perception.
PhysRVG: Physics-Aware Unified Reinforcement Learning for Video Generative Models
Jan 16, 2026Physical principles are fundamental to realistic visual simulation, but remain a significant oversight in transformer-based video generation. This gap highlights a critical limitation in rendering rigid body motion, a core tenet of classical mechanics. While computer graphics and physics-based simulators can easily model such collisions using Newton formulas, modern pretrain-finetune paradigms discard the concept of object rigidity during pixel-level global denoising. Even perfectly correct mathematical constraints are treated as suboptimal solutions (i.e., conditions) during model optimization in post-training, fundamentally limiting the physical realism of generated videos. Motivated by these considerations, we introduce, for the first time, a physics-aware reinforcement learning paradigm for video generation models that enforces physical collision rules directly in high-dimensional spaces, ensuring the physics knowledge is strictly applied rather than treated as conditions. Subsequently, we extend this paradigm to a unified framework, termed Mimicry-Discovery Cycle (MDcycle), which allows substantial fine-tuning while fully preserving the model's ability to leverage physics-grounded feedback. To validate our approach, we construct new benchmark PhysRVGBench and perform extensive qualitative and quantitative experiments to thoroughly assess its effectiveness.
The World is Your Canvas: Painting Promptable Events with Reference Images, Trajectories, and Text
Dec 18, 2025


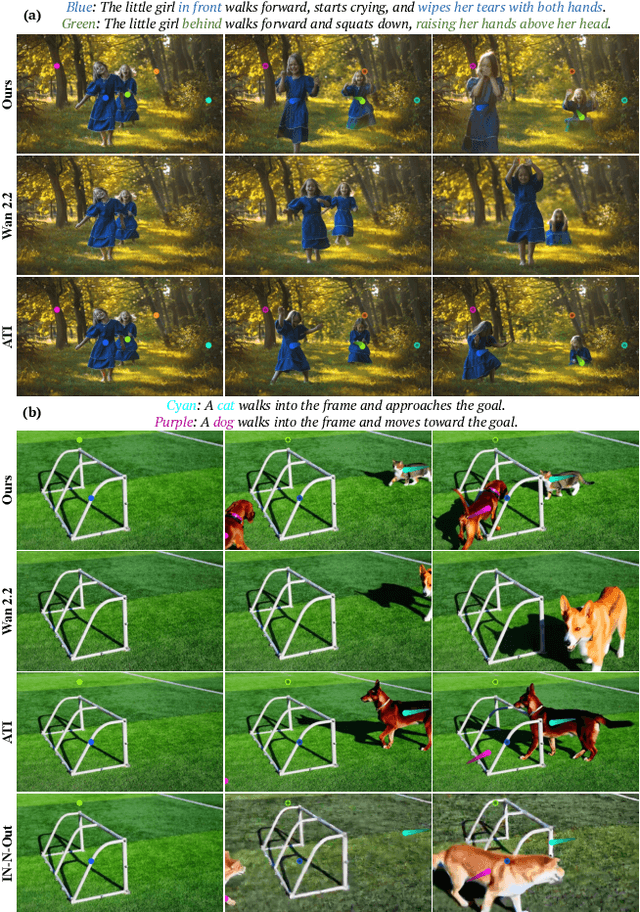
We present WorldCanvas, a framework for promptable world events that enables rich, user-directed simulation by combining text, trajectories, and reference images. Unlike text-only approaches and existing trajectory-controlled image-to-video methods, our multimodal approach combines trajectories -- encoding motion, timing, and visibility -- with natural language for semantic intent and reference images for visual grounding of object identity, enabling the generation of coherent, controllable events that include multi-agent interactions, object entry/exit, reference-guided appearance and counterintuitive events. The resulting videos demonstrate not only temporal coherence but also emergent consistency, preserving object identity and scene despite temporary disappearance. By supporting expressive world events generation, WorldCanvas advances world models from passive predictors to interactive, user-shaped simulators. Our project page is available at: https://worldcanvas.github.io/.
ZeroDexGrasp: Zero-Shot Task-Oriented Dexterous Grasp Synthesis with Prompt-Based Multi-Stage Semantic Reasoning
Nov 17, 2025Task-oriented dexterous grasping holds broad application prospects in robotic manipulation and human-object interaction. However, most existing methods still struggle to generalize across diverse objects and task instructions, as they heavily rely on costly labeled data to ensure task-specific semantic alignment. In this study, we propose \textbf{ZeroDexGrasp}, a zero-shot task-oriented dexterous grasp synthesis framework integrating Multimodal Large Language Models with grasp refinement to generate human-like grasp poses that are well aligned with specific task objectives and object affordances. Specifically, ZeroDexGrasp employs prompt-based multi-stage semantic reasoning to infer initial grasp configurations and object contact information from task and object semantics, then exploits contact-guided grasp optimization to refine these poses for physical feasibility and task alignment. Experimental results demonstrate that ZeroDexGrasp enables high-quality zero-shot dexterous grasping on diverse unseen object categories and complex task requirements, advancing toward more generalizable and intelligent robotic grasping.
SpatialTrackerV2: 3D Point Tracking Made Easy
Jul 16, 2025We present SpatialTrackerV2, a feed-forward 3D point tracking method for monocular videos. Going beyond modular pipelines built on off-the-shelf components for 3D tracking, our approach unifies the intrinsic connections between point tracking, monocular depth, and camera pose estimation into a high-performing and feedforward 3D point tracker. It decomposes world-space 3D motion into scene geometry, camera ego-motion, and pixel-wise object motion, with a fully differentiable and end-to-end architecture, allowing scalable training across a wide range of datasets, including synthetic sequences, posed RGB-D videos, and unlabeled in-the-wild footage. By learning geometry and motion jointly from such heterogeneous data, SpatialTrackerV2 outperforms existing 3D tracking methods by 30%, and matches the accuracy of leading dynamic 3D reconstruction approaches while running 50$\times$ faster.
BoxDreamer: Dreaming Box Corners for Generalizable Object Pose Estimation
Apr 10, 2025This paper presents a generalizable RGB-based approach for object pose estimation, specifically designed to address challenges in sparse-view settings. While existing methods can estimate the poses of unseen objects, their generalization ability remains limited in scenarios involving occlusions and sparse reference views, restricting their real-world applicability. To overcome these limitations, we introduce corner points of the object bounding box as an intermediate representation of the object pose. The 3D object corners can be reliably recovered from sparse input views, while the 2D corner points in the target view are estimated through a novel reference-based point synthesizer, which works well even in scenarios involving occlusions. As object semantic points, object corners naturally establish 2D-3D correspondences for object pose estimation with a PnP algorithm. Extensive experiments on the YCB-Video and Occluded-LINEMOD datasets show that our approach outperforms state-of-the-art methods, highlighting the effectiveness of the proposed representation and significantly enhancing the generalization capabilities of object pose estimation, which is crucial for real-world applications.