 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZeroDexGrasp: Zero-Shot Task-Oriented Dexterous Grasp Synthesis with Prompt-Based Multi-Stage Semantic Reasoning
Nov 17, 2025Task-oriented dexterous grasping holds broad application prospects in robotic manipulation and human-object interaction. However, most existing methods still struggle to generalize across diverse objects and task instructions, as they heavily rely on costly labeled data to ensure task-specific semantic alignment. In this study, we propose \textbf{ZeroDexGrasp}, a zero-shot task-oriented dexterous grasp synthesis framework integrating Multimodal Large Language Models with grasp refinement to generate human-like grasp poses that are well aligned with specific task objectives and object affordances. Specifically, ZeroDexGrasp employs prompt-based multi-stage semantic reasoning to infer initial grasp configurations and object contact information from task and object semantics, then exploits contact-guided grasp optimization to refine these poses for physical feasibility and task alignment. Experimental results demonstrate that ZeroDexGrasp enables high-quality zero-shot dexterous grasping on diverse unseen object categories and complex task requirements, advancing toward more generalizable and intelligent robotic grasping.
G-DexGrasp: Generalizable Dexterous Grasping Synthesis Via Part-Aware Prior Retrieval and Prior-Assisted Generation
Mar 25, 2025



Recent advances in dexterous grasping synthesis have demonstrated significant progress in producing reasonable and plausible grasps for many task purposes. But it remains challenging to generalize to unseen object categories and diverse task instructions. In this paper, we propose G-DexGrasp, a retrieval-augmented generation approach that can produce high-quality dexterous hand configurations for unseen object categories and language-based task instructions. The key is to retrieve generalizable grasping priors, including the fine-grained contact part and the affordance-related distribution of relevant grasping instances, for the following synthesis pipeline. Specifically, the fine-grained contact part and affordance act as generalizable guidance to infer reasonable grasping configurations for unseen objects with a generative model, while the relevant grasping distribution plays as regularization to guarantee the plausibility of synthesized grasps during the subsequent refinement optimization. Our comparison experiments validate the effectiveness of our key designs for generalization and demonstrate the remarkable performance against the existing approaches. Project page: https://g-dexgrasp.github.io/
AffordPose: A Large-scale Dataset of Hand-Object Interactions with Affordance-driven Hand Pose
Sep 16, 2023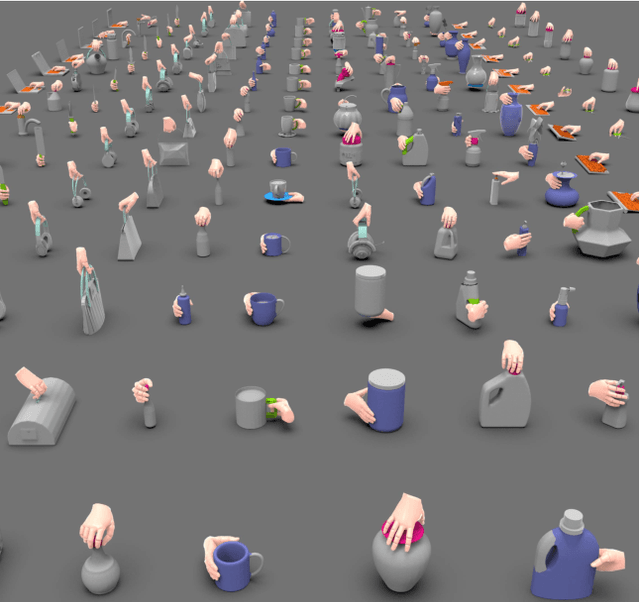
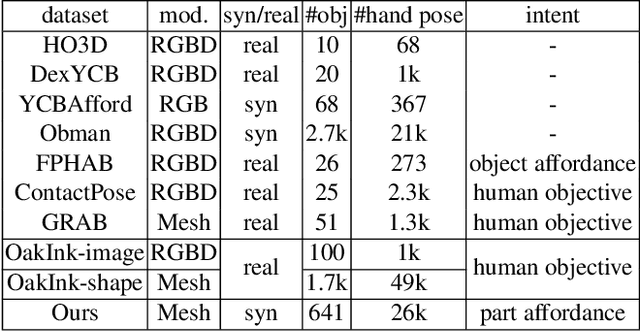


How human interact with objects depends on the functional roles of the target objects, which introduces the problem of affordance-aware hand-object interaction. It requires a large number of human demonstrations for the learning and understanding of plausible and appropriate hand-object interactions. In this work, we present AffordPose, a large-scale dataset of hand-object interactions with affordance-driven hand pose. We first annotate the specific part-level affordance labels for each object, e.g. twist, pull, handle-grasp, etc, instead of the general intents such as use or handover, to indicate the purpose and guide the localization of the hand-object interactions. The fine-grained hand-object interactions reveal the influence of hand-centered affordances on the detailed arrangement of the hand poses, yet also exhibit a certain degree of diversity. We collect a total of 26.7K hand-object interactions, each including the 3D object shape, the part-level affordance label, and the manually adjusted hand poses. The comprehensive data analysis shows the common characteristics and diversity of hand-object interactions per affordance via the parameter statistics and contacting computation. We also conduct experiments on the tasks of hand-object affordance understanding and affordance-oriented hand-object interaction generation, to validate the effectiveness of our dataset in learning the fine-grained hand-object interactions. Project page: https://github.com/GentlesJan/AffordPose.