 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploring Talking Head Models With Adjacent Frame Prior for Speech-Preserving Facial Expression Manipulation
Jan 19, 2026Speech-Preserving Facial Expression Manipulation (SPFEM) is an innovative technique aimed at altering facial expressions in images and videos while retaining the original mouth movements. Despite advancements, SPFEM still struggles with accurate lip synchronization due to the complex interplay between facial expressions and mouth shapes. Capitalizing on the advanced capabilities of audio-driven talking head generation (AD-THG) models in synthesizing precise lip movements, our research introduces a novel integration of these models with SPFEM. We present a new framework, Talking Head Facial Expression Manipulation (THFEM), which utilizes AD-THG models to generate frames with accurately synchronized lip movements from audio inputs and SPFEM-altered images. However, increasing the number of frames generated by AD-THG models tends to compromise the realism and expression fidelity of the images. To counter this, we develop an adjacent frame learning strategy that finetunes AD-THG models to predict sequences of consecutive frames. This strategy enables the models to incorporate information from neighboring frames, significantly improving image quality during testing. Our extensive experimental evaluations demonstrate that this framework effectively preserves mouth shapes during expression manipulations, highlighting the substantial benefits of integrating AD-THG with SPFEM.
DCA-LUT: Deep Chromatic Alignment with 5D LUT for Purple Fringing Removal
Nov 15, 2025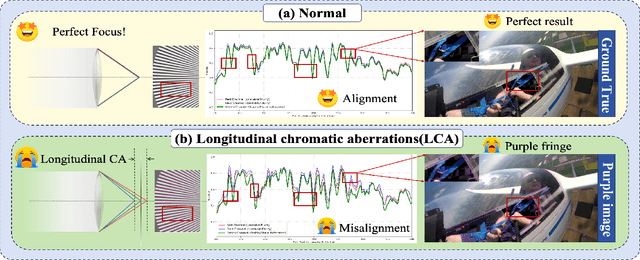
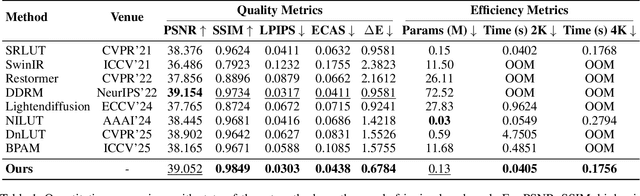
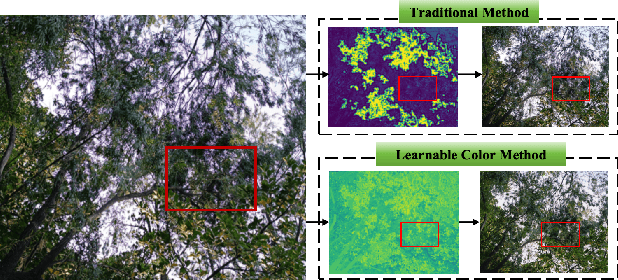
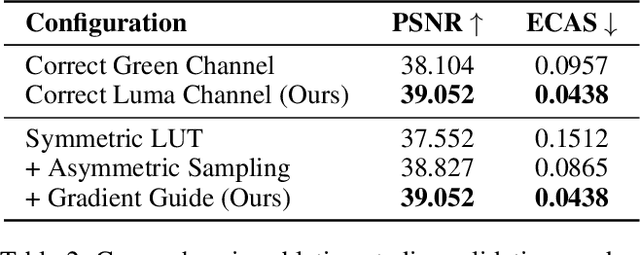
Purple fringing, a persistent artifact caused by Longitudinal Chromatic Aberration (LCA) in camera lenses, has long degraded the clarity and realism of digital imaging. Traditional solutions rely on complex and expensive apochromatic (APO) lens hardware and the extraction of handcrafted features, ignoring the data-driven approach. To fill this gap, we introduce DCA-LUT, the first deep learning framework for purple fringing removal. Inspired by the physical root of the problem, the spatial misalignment of RGB color channels due to lens dispersion, we introduce a novel Chromatic-Aware Coordinate Transformation (CA-CT) module, learning an image-adaptive color space to decouple and isolate fringing into a dedicated dimension. This targeted separation allows the network to learn a precise ``purple fringe channel", which then guides the accurate restoration of the luminance channel. The final color correction is performed by a learned 5D Look-Up Table (5D LUT), enabling efficient and powerful% non-linear color mapping. To enable robust training and fair evaluation, we constructed a large-scale synthetic purple fringing dataset (PF-Synth). Extensive experiments in synthetic and real-world datasets demonstrate that our method achieves state-of-the-art performance in purple fringing removal.
OracleAgent: A Multimodal Reasoning Agent for Oracle Bone Script Research
Oct 30, 2025As one of the earliest writing systems, Oracle Bone Script (OBS) preserves the cultural and intellectual heritage of ancient civilizations. However, current OBS research faces two major challenges: (1) the interpretation of OBS involves a complex workflow comprising multiple serial and parallel sub-tasks, and (2) the efficiency of OBS information organization and retrieval remains a critical bottleneck, as scholars often spend substantial effort searching for, compiling, and managing relevant resources. To address these challenges, we present OracleAgent, the first agent system designed for the structured management and retrieval of OBS-related information. OracleAgent seamlessly integrates multiple OBS analysis tools, empowered by large language models (LLMs), and can flexibly orchestrate these components. Additionally, we construct a comprehensive domain-specific multimodal knowledge base for OBS, which is built through a rigorous multi-year process of data collection, cleaning, and expert annotation. The knowledge base comprises over 1.4M single-character rubbing images and 80K interpretation texts. OracleAgent leverages this resource through its multimodal tools to assist experts in retrieval tasks of character, document, interpretation text, and rubbing image. Extensive experiments demonstrate that OracleAgent achieves superior performance across a range of multimodal reasoning and generation tasks, surpassing leading mainstream multimodal large language models (MLLMs) (e.g., GPT-4o). Furthermore, our case study illustrates that OracleAgent can effectively assist domain experts, significantly reducing the time cost of OBS research. These results highlight OracleAgent as a significant step toward the practical deployment of OBS-assisted research and automated interpretation systems.
Zero-Shot Visual Grounding in 3D Gaussians via View Retrieval
Sep 19, 2025


3D Visual Grounding (3DVG) aims to locate objects in 3D scenes based on text prompts, which is essential for applications such as robotics. However, existing 3DVG methods encounter two main challenges: first, they struggle to handle the implicit representation of spatial textures in 3D Gaussian Splatting (3DGS), making per-scene training indispensable; second, they typically require larges amounts of labeled data for effective training. To this end, we propose \underline{G}rounding via \underline{V}iew \underline{R}etrieval (GVR), a novel zero-shot visual grounding framework for 3DGS to transform 3DVG as a 2D retrieval task that leverages object-level view retrieval to collect grounding clues from multiple views, which not only avoids the costly process of 3D annotation, but also eliminates the need for per-scene training. Extensive experiments demonstrate that our method achieves state-of-the-art visual grounding performance while avoiding per-scene training, providing a solid foundation for zero-shot 3DVG research. Video demos can be found in https://github.com/leviome/GVR_demos.
MARS2 2025 Challenge on Multimodal Reasoning: Datasets, Methods, Results, Discussion, and Outlook
Sep 17, 2025
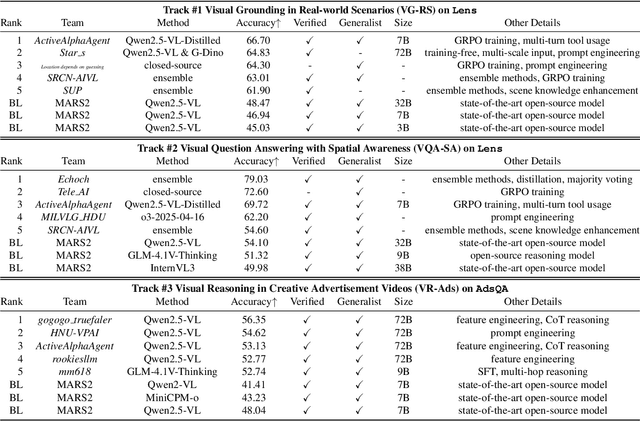

This paper reviews the MARS2 2025 Challenge on Multimodal Reasoning. We aim to bring together different approaches in multimodal machine learning and LLMs via a large benchmark. We hope it better allows researchers to follow the state-of-the-art in this very dynamic area. Meanwhile, a growing number of testbeds have boosted the evolution of general-purpose large language models. Thus, this year's MARS2 focuses on real-world and specialized scenarios to broaden the multimodal reasoning applications of MLLMs. Our organizing team released two tailored datasets Lens and AdsQA as test sets, which support general reasoning in 12 daily scenarios and domain-specific reasoning in advertisement videos, respectively. We evaluated 40+ baselines that include both generalist MLLMs and task-specific models, and opened up three competition tracks, i.e., Visual Grounding in Real-world Scenarios (VG-RS), Visual Question Answering with Spatial Awareness (VQA-SA), and Visual Reasoning in Creative Advertisement Videos (VR-Ads). Finally, 76 teams from the renowned academic and industrial institutions have registered and 40+ valid submissions (out of 1200+) have been included in our ranking lists. Our datasets, code sets (40+ baselines and 15+ participants' methods), and rankings are publicly available on the MARS2 workshop website and our GitHub organization page https://github.com/mars2workshop/, where our updates and announcements of upcoming events will be continuously provided.
MoCo: Motion-Consistent Human Video Generation via Structure-Appearance Decoupling
Aug 24, 2025Generating human videos with consistent motion from text prompts remains a significant challenge, particularly for whole-body or long-range motion. Existing video generation models prioritize appearance fidelity, resulting in unrealistic or physically implausible human movements with poor structural coherence. Additionally, most existing human video datasets primarily focus on facial or upper-body motions, or consist of vertically oriented dance videos, limiting the scope of corresponding generation methods to simple movements. To overcome these challenges, we propose MoCo, which decouples the process of human video generation into two components: structure generation and appearance generation. Specifically, our method first employs an efficient 3D structure generator to produce a human motion sequence from a text prompt. The remaining video appearance is then synthesized under the guidance of the generated structural sequence. To improve fine-grained control over sparse human structures, we introduce Human-Aware Dynamic Control modules and integrate dense tracking constraints during training. Furthermore, recognizing the limitations of existing datasets, we construct a large-scale whole-body human video dataset featuring complex and diverse motions. Extensive experiments demonstrate that MoCo outperforms existing approaches in generating realistic and structurally coherent human videos.
InfiniteTalk: Audio-driven Video Generation for Sparse-Frame Video Dubbing
Aug 19, 2025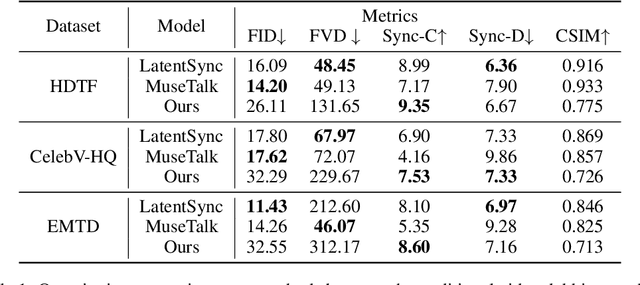
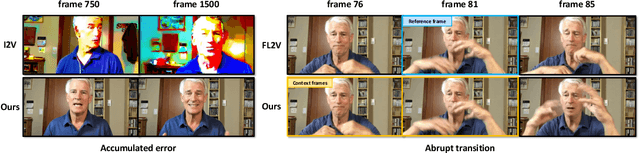
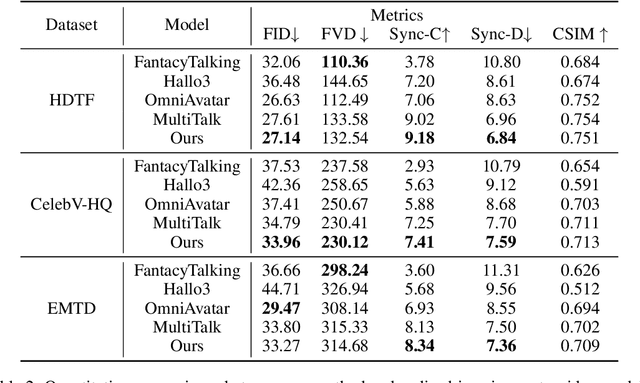
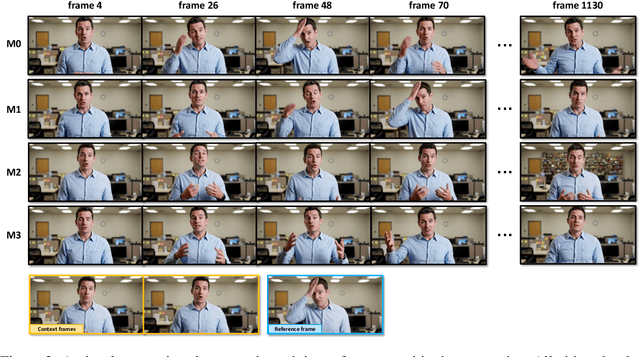
Recent breakthroughs in video AIGC have ushered in a transformative era for audio-driven human animation. However, conventional video dubbing techniques remain constrained to mouth region editing, resulting in discordant facial expressions and body gestures that compromise viewer immersion. To overcome this limitation, we introduce sparse-frame video dubbing, a novel paradigm that strategically preserves reference keyframes to maintain identity, iconic gestures, and camera trajectories while enabling holistic, audio-synchronized full-body motion editing. Through critical analysis, we identify why naive image-to-video models fail in this task, particularly their inability to achieve adaptive conditioning. Addressing this, we propose InfiniteTalk, a streaming audio-driven generator designed for infinite-length long sequence dubbing. This architecture leverages temporal context frames for seamless inter-chunk transitions and incorporates a simple yet effective sampling strategy that optimizes control strength via fine-grained reference frame positioning. Comprehensive evaluations on HDTF, CelebV-HQ, and EMTD datasets demonstrate state-of-the-art performance. Quantitative metrics confirm superior visual realism, emotional coherence, and full-body motion synchronization.
Spec-VLA: Speculative Decoding for Vision-Language-Action Models with Relaxed Acceptance
Jul 30, 2025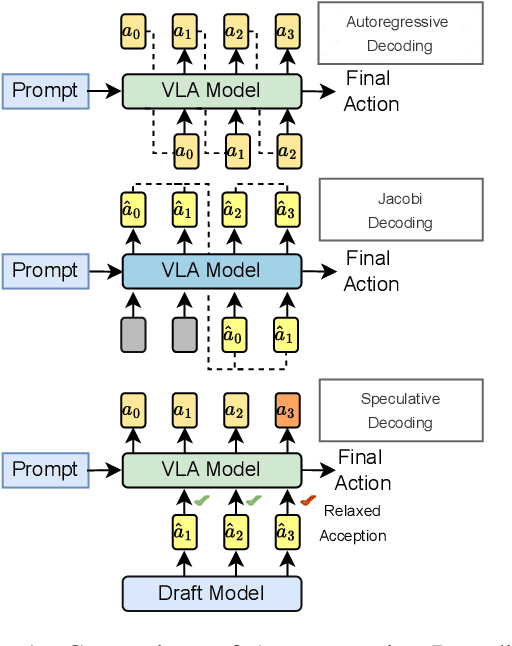
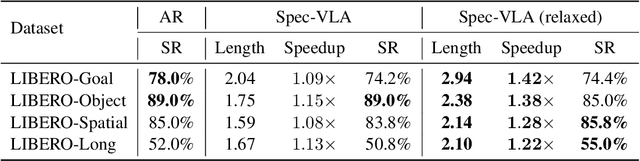
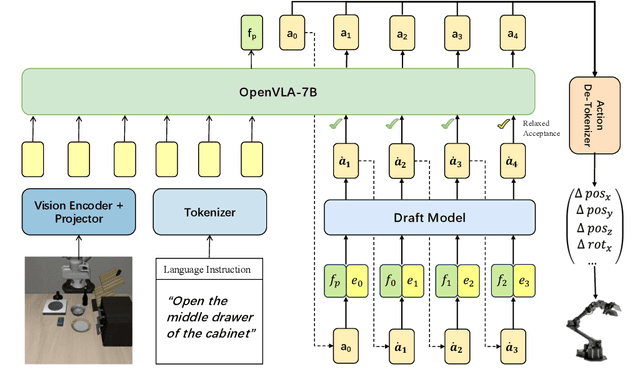
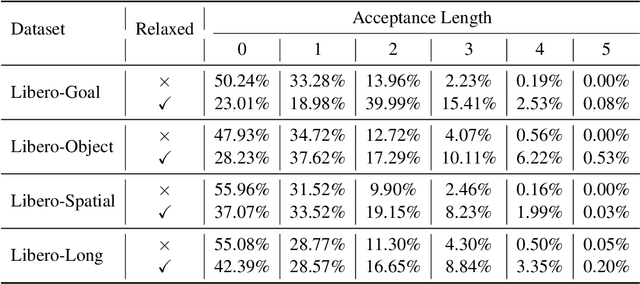
Vision-Language-Action (VLA) models have made substantial progress by leveraging the robust capabilities of Visual Language Models (VLMs). However, VLMs' significant parameter size and autoregressive (AR) decoding nature impose considerable computational demands on VLA models. While Speculative Decoding (SD) has shown efficacy in accelerating Large Language Models (LLMs) by incorporating efficient drafting and parallel verification, allowing multiple tokens to be generated in one forward pass, its application to VLA models remains unexplored. This work introduces Spec-VLA, an SD framework designed to accelerate VLA models. Due to the difficulty of the action prediction task and the greedy decoding mechanism of the VLA models, the direct application of the advanced SD framework to the VLA prediction task yields a minor speed improvement. To boost the generation speed, we propose an effective mechanism to relax acceptance utilizing the relative distances represented by the action tokens of the VLA model. Empirical results across diverse test scenarios affirm the effectiveness of the Spec-VLA framework, and further analysis substantiates the impact of our proposed strategies, which enhance the acceptance length by 44%, achieving 1.42 times speedup compared with the OpenVLA baseline, without compromising the success rate. The success of the Spec-VLA framework highlights the potential for broader application of speculative execution in VLA prediction scenarios.
DAM-VSR: Disentanglement of Appearance and Motion for Video Super-Resolution
Jul 01, 2025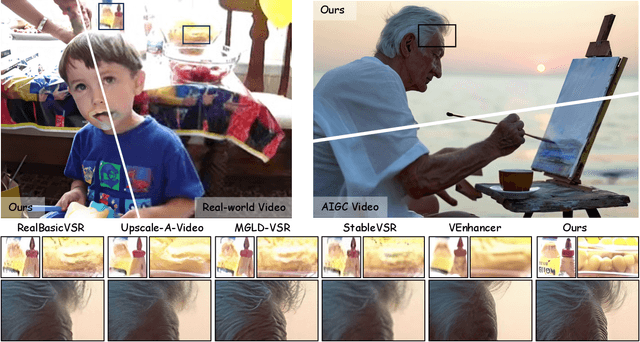

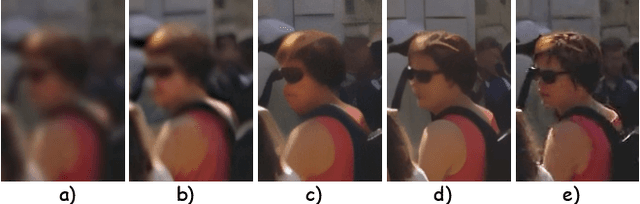
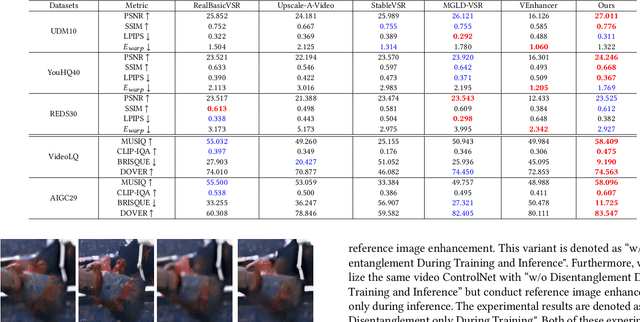
Real-world video super-resolution (VSR) presents significant challenges due to complex and unpredictable degradations. Although some recent methods utilize image diffusion models for VSR and have shown improved detail generation capabilities, they still struggle to produce temporally consistent frames. We attempt to use Stable Video Diffusion (SVD) combined with ControlNet to address this issue. However, due to the intrinsic image-animation characteristics of SVD, it is challenging to generate fine details using only low-quality videos. To tackle this problem, we propose DAM-VSR, an appearance and motion disentanglement framework for VSR. This framework disentangles VSR into appearance enhancement and motion control problems. Specifically, appearance enhancement is achieved through reference image super-resolution, while motion control is achieved through video ControlNet. This disentanglement fully leverages the generative prior of video diffusion models and the detail generation capabilities of image super-resolution models. Furthermore, equipped with the proposed motion-aligned bidirectional sampling strategy, DAM-VSR can conduct VSR on longer input videos. DAM-VSR achieves state-of-the-art performance on real-world data and AIGC data, demonstrating its powerful detail generation capabilities.
Aerial Multi-View Stereo via Adaptive Depth Range Inference and Normal Cues
Jun 06, 2025Three-dimensional digital urban reconstruction from multi-view aerial images is a critical application where deep multi-view stereo (MVS) methods outperform traditional techniques. However, existing methods commonly overlook the key differences between aerial and close-range settings, such as varying depth ranges along epipolar lines and insensitive feature-matching associated with low-detailed aerial images. To address these issues, we propose an Adaptive Depth Range MVS (ADR-MVS), which integrates monocular geometric cues to improve multi-view depth estimation accuracy. The key component of ADR-MVS is the depth range predictor, which generates adaptive range maps from depth and normal estimates using cross-attention discrepancy learning. In the first stage, the range map derived from monocular cues breaks through predefined depth boundaries, improving feature-matching discriminability and mitigating convergence to local optima. In later stages, the inferred range maps are progressively narrowed, ultimately aligning with the cascaded MVS framework for precise depth regression. Moreover, a normal-guided cost aggregation operation is specially devised for aerial stereo images to improve geometric awareness within the cost volume. Finally, we introduce a normal-guided depth refinement module that surpasses existing RGB-guided techniques. Experimental results demonstrate that ADR-MVS achieves state-of-the-art performance on the WHU, LuoJia-MVS, and M\"unchen datasets, while exhibits superior computational complexity.