 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Robot System for Cooperative Exploration in Unknown Environments: A Survey
Mar 10, 2025With the advancement of multi-robot technology, cooperative exploration tasks have garnered increasing attention. This paper presents a comprehensive review of multi-robot cooperative exploration systems. First, we review the evolution of robotic exploration and introduce a modular research framework tailored for multi-robot cooperative exploration. Based on this framework, we systematically categorize and summarize key system components. As a foundational module for multi-robot exploration, the localization and mapping module is primarily introduced by focusing on global and relative pose estimation, as well as multi-robot map merging techniques. The cooperative motion module is further divided into learning-based approaches and multi-stage planning, with the latter encompassing target generation, task allocation, and motion planning strategies. Given the communication constraints of real-world environments, we also analyze the communication module, emphasizing how robots exchange information within local communication ranges and under limited transmission capabilities. Finally, we discuss the challenges and future research directions for multi-robot cooperative exploration in light of real-world trends. This review aims to serve as a valuable reference for researchers and practitioners in the field.
VolleyBots: A Testbed for Multi-Drone Volleyball Game Combining Motion Control and Strategic Play
Feb 04, 2025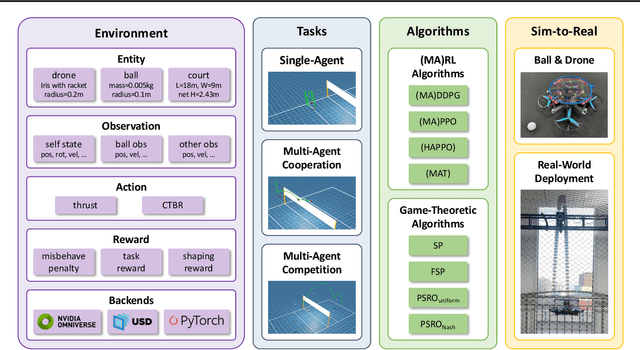
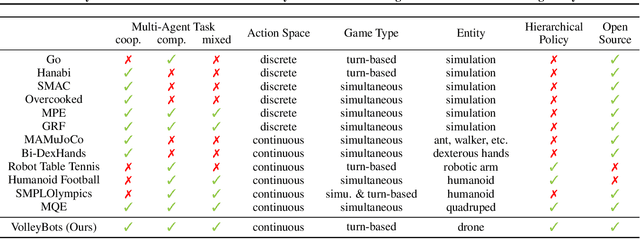
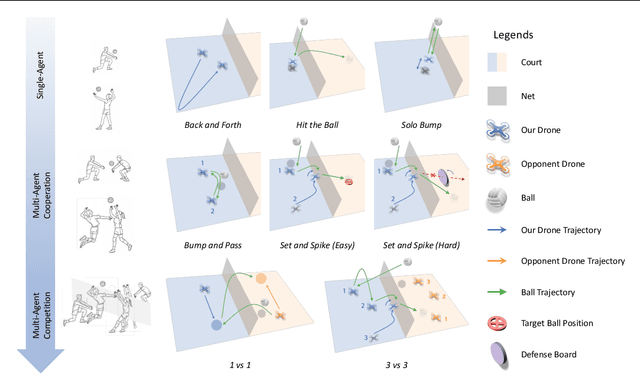

Multi-agent reinforcement learning (MARL) has made significant progress, largely fueled by the development of specialized testbeds that enable systematic evaluation of algorithms in controlled yet challenging scenarios. However, existing testbeds often focus on purely virtual simulations or limited robot morphologies such as robotic arms, quadrupeds, and humanoids, leaving high-mobility platforms with real-world physical constraints like drones underexplored. To bridge this gap, we present VolleyBots, a new MARL testbed where multiple drones cooperate and compete in the sport of volleyball under physical dynamics. VolleyBots features a turn-based interaction model under volleyball rules, a hierarchical decision-making process that combines motion control and strategic play, and a high-fidelity simulation for seamless sim-to-real transfer. We provide a comprehensive suite of tasks ranging from single-drone drills to multi-drone cooperative and competitive tasks, accompanied by baseline evaluations of representative MARL and game-theoretic algorithms. Results in simulation show that while existing algorithms handle simple tasks effectively, they encounter difficulty in complex tasks that require both low-level control and high-level strategy. We further demonstrate zero-shot deployment of a simulation-learned policy to real-world drones, highlighting VolleyBots' potential to propel MARL research involving agile robotic platforms. The project page is at https://sites.google.com/view/volleybots/home.