 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWideSeek-R1: Exploring Width Scaling for Broad Information Seeking via Multi-Agent Reinforcement Learning
Feb 04, 2026Recent advancements in Large Language Models (LLMs) have largely focused on depth scaling, where a single agent solves long-horizon problems with multi-turn reasoning and tool use. However, as tasks grow broader, the key bottleneck shifts from individual competence to organizational capability. In this work, we explore a complementary dimension of width scaling with multi-agent systems to address broad information seeking. Existing multi-agent systems often rely on hand-crafted workflows and turn-taking interactions that fail to parallelize work effectively. To bridge this gap, we propose WideSeek-R1, a lead-agent-subagent framework trained via multi-agent reinforcement learning (MARL) to synergize scalable orchestration and parallel execution. By utilizing a shared LLM with isolated contexts and specialized tools, WideSeek-R1 jointly optimizes the lead agent and parallel subagents on a curated dataset of 20k broad information-seeking tasks. Extensive experiments show that WideSeek-R1-4B achieves an item F1 score of 40.0% on the WideSearch benchmark, which is comparable to the performance of single-agent DeepSeek-R1-671B. Furthermore, WideSeek-R1-4B exhibits consistent performance gains as the number of parallel subagents increases, highlighting the effectiveness of width scaling.
Mastering Multi-Drone Volleyball through Hierarchical Co-Self-Play Reinforcement Learning
May 07, 2025In this paper, we tackle the problem of learning to play 3v3 multi-drone volleyball, a new embodied competitive task that requires both high-level strategic coordination and low-level agile control. The task is turn-based, multi-agent, and physically grounded, posing significant challenges due to its long-horizon dependencies, tight inter-agent coupling, and the underactuated dynamics of quadrotors. To address this, we propose Hierarchical Co-Self-Play (HCSP), a hierarchical reinforcement learning framework that separates centralized high-level strategic decision-making from decentralized low-level motion control. We design a three-stage population-based training pipeline to enable both strategy and skill to emerge from scratch without expert demonstrations: (I) training diverse low-level skills, (II) learning high-level strategy via self-play with fixed low-level controllers, and (III) joint fine-tuning through co-self-play. Experiments show that HCSP achieves superior performance, outperforming non-hierarchical self-play and rule-based hierarchical baselines with an average 82.9\% win rate and a 71.5\% win rate against the two-stage variant. Moreover, co-self-play leads to emergent team behaviors such as role switching and coordinated formations, demonstrating the effectiveness of our hierarchical design and training scheme.
VolleyBots: A Testbed for Multi-Drone Volleyball Game Combining Motion Control and Strategic Play
Feb 04, 2025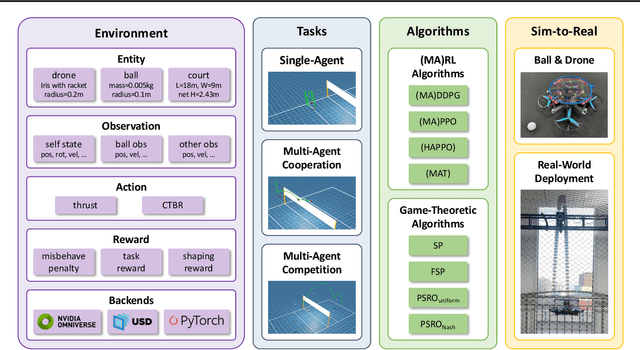
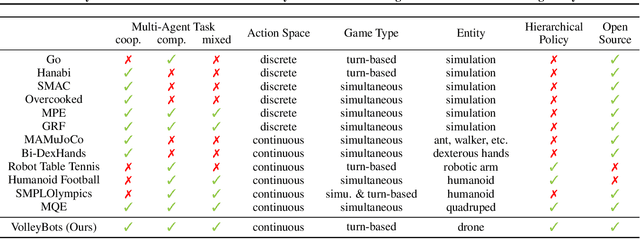
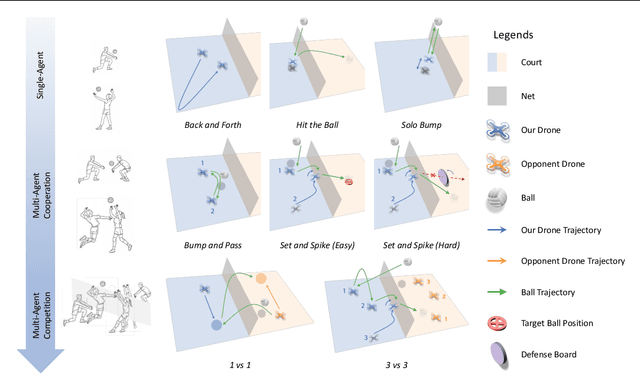

Multi-agent reinforcement learning (MARL) has made significant progress, largely fueled by the development of specialized testbeds that enable systematic evaluation of algorithms in controlled yet challenging scenarios. However, existing testbeds often focus on purely virtual simulations or limited robot morphologies such as robotic arms, quadrupeds, and humanoids, leaving high-mobility platforms with real-world physical constraints like drones underexplored. To bridge this gap, we present VolleyBots, a new MARL testbed where multiple drones cooperate and compete in the sport of volleyball under physical dynamics. VolleyBots features a turn-based interaction model under volleyball rules, a hierarchical decision-making process that combines motion control and strategic play, and a high-fidelity simulation for seamless sim-to-real transfer. We provide a comprehensive suite of tasks ranging from single-drone drills to multi-drone cooperative and competitive tasks, accompanied by baseline evaluations of representative MARL and game-theoretic algorithms. Results in simulation show that while existing algorithms handle simple tasks effectively, they encounter difficulty in complex tasks that require both low-level control and high-level strategy. We further demonstrate zero-shot deployment of a simulation-learned policy to real-world drones, highlighting VolleyBots' potential to propel MARL research involving agile robotic platforms. The project page is at https://sites.google.com/view/volleybots/home.
DragEntity: Trajectory Guided Video Generation using Entity and Positional Relationships
Oct 14, 2024In recent years, diffusion models have achieved tremendous success in the field of video generation, with controllable video generation receiving significant attention. However, existing control methods still face two limitations: Firstly, control conditions (such as depth maps, 3D Mesh) are difficult for ordinary users to obtain directly. Secondly, it's challenging to drive multiple objects through complex motions with multiple trajectories simultaneously. In this paper, we introduce DragEntity, a video generation model that utilizes entity representation for controlling the motion of multiple objects. Compared to previous methods, DragEntity offers two main advantages: 1) Our method is more user-friendly for interaction because it allows users to drag entities within the image rather than individual pixels. 2) We use entity representation to represent any object in the image, and multiple objects can maintain relative spatial relationships. Therefore, we allow multiple trajectories to control multiple objects in the image with different levels of complexity simultaneously. Our experiments validate the effectiveness of DragEntity, demonstrating its excellent performance in fine-grained control in video generation.
A Survey on Self-play Methods in Reinforcement Learning
Aug 02, 2024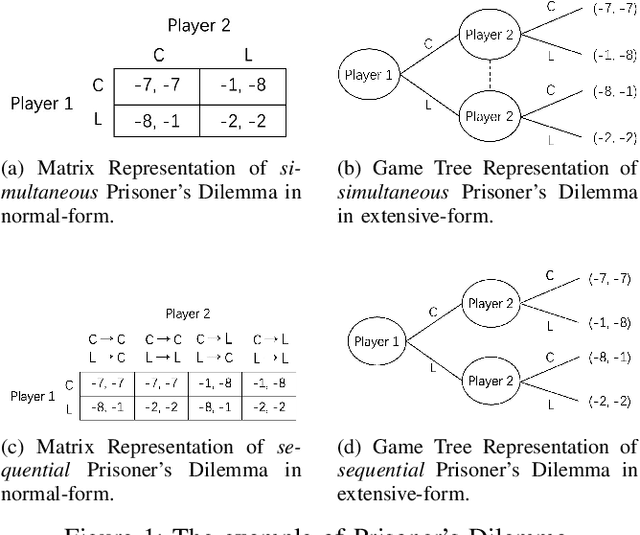
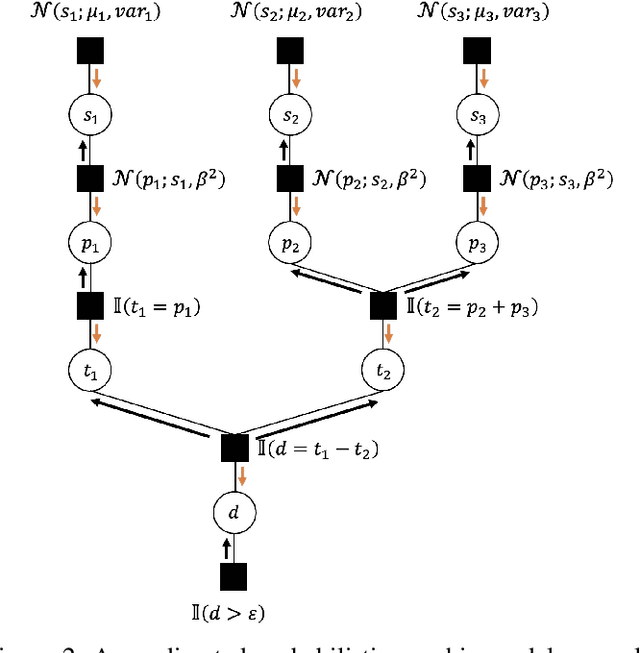
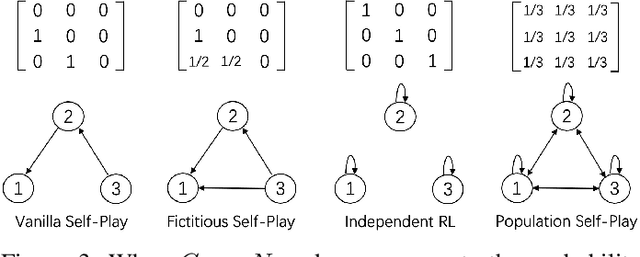
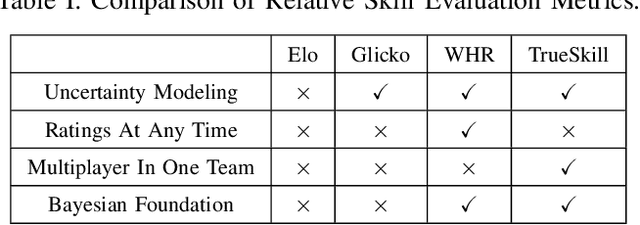
Self-play, characterized by agents' interactions with copies or past versions of itself, has recently gained prominence in reinforcement learning. This paper first clarifies the preliminaries of self-play, including the multi-agent reinforcement learning framework and basic game theory concepts. Then it provides a unified framework and classifies existing self-play algorithms within this framework. Moreover, the paper bridges the gap between the algorithms and their practical implications by illustrating the role of self-play in different scenarios. Finally, the survey highlights open challenges and future research directions in self-play. This paper is an essential guide map for understanding the multifaceted landscape of self-play in RL.
OmniDrones: An Efficient and Flexible Platform for Reinforcement Learning in Drone Control
Sep 22, 2023



In this work, we introduce OmniDrones, an efficient and flexible platform tailored for reinforcement learning in drone control, built on Nvidia's Omniverse Isaac Sim. It employs a bottom-up design approach that allows users to easily design and experiment with various application scenarios on top of GPU-parallelized simulations. It also offers a range of benchmark tasks, presenting challenges ranging from single-drone hovering to over-actuated system tracking. In summary, we propose an open-sourced drone simulation platform, equipped with an extensive suite of tools for drone learning. It includes 4 drone models, 5 sensor modalities, 4 control modes, over 10 benchmark tasks, and a selection of widely used RL baselines. To showcase the capabilities of OmniDrones and to support future research, we also provide preliminary results on these benchmark tasks. We hope this platform will encourage further studies on applying RL to practical drone systems.