 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Imitation: Reinforcement Learning-Based Sim-Real Co-Training for VLA Models
Feb 16, 2026Simulation offers a scalable and low-cost way to enrich vision-language-action (VLA) training, reducing reliance on expensive real-robot demonstrations. However, most sim-real co-training methods rely on supervised fine-tuning (SFT), which treats simulation as a static source of demonstrations and does not exploit large-scale closed-loop interaction. Consequently, real-world gains and generalization are often limited. In this paper, we propose an \underline{\textit{RL}}-based sim-real \underline{\textit{Co}}-training \modify{(RL-Co)} framework that leverages interactive simulation while preserving real-world capabilities. Our method follows a generic two-stage design: we first warm-start the policy with SFT on a mixture of real and simulated demonstrations, then fine-tune it with reinforcement learning in simulation while adding an auxiliary supervised loss on real-world data to anchor the policy and mitigate catastrophic forgetting. We evaluate our framework on four real-world tabletop manipulation tasks using two representative VLA architectures, OpenVLA and $π_{0.5}$, and observe consistent improvements over real-only fine-tuning and SFT-based co-training, including +24% real-world success on OpenVLA and +20% on $π_{0.5}$. Beyond higher success rates, RL co-training yields stronger generalization to unseen task variations and substantially improved real-world data efficiency, providing a practical and scalable pathway for leveraging simulation to enhance real-robot deployment.
Multi-Robot System for Cooperative Exploration in Unknown Environments: A Survey
Mar 10, 2025With the advancement of multi-robot technology, cooperative exploration tasks have garnered increasing attention. This paper presents a comprehensive review of multi-robot cooperative exploration systems. First, we review the evolution of robotic exploration and introduce a modular research framework tailored for multi-robot cooperative exploration. Based on this framework, we systematically categorize and summarize key system components. As a foundational module for multi-robot exploration, the localization and mapping module is primarily introduced by focusing on global and relative pose estimation, as well as multi-robot map merging techniques. The cooperative motion module is further divided into learning-based approaches and multi-stage planning, with the latter encompassing target generation, task allocation, and motion planning strategies. Given the communication constraints of real-world environments, we also analyze the communication module, emphasizing how robots exchange information within local communication ranges and under limited transmission capabilities. Finally, we discuss the challenges and future research directions for multi-robot cooperative exploration in light of real-world trends. This review aims to serve as a valuable reference for researchers and practitioners in the field.
What Matters in Learning A Zero-Shot Sim-to-Real RL Policy for Quadrotor Control? A Comprehensive Study
Dec 17, 2024



Executing precise and agile flight maneuvers is critical for quadrotors in various applications. Traditional quadrotor control approaches are limited by their reliance on flat trajectories or time-consuming optimization, which restricts their flexibility. Recently, RL-based policy has emerged as a promising alternative due to its ability to directly map observations to actions, reducing the need for detailed system knowledge and actuation constraints. However, a significant challenge remains in bridging the sim-to-real gap, where RL-based policies often experience instability when deployed in real world. In this paper, we investigate key factors for learning robust RL-based control policies that are capable of zero-shot deployment in real-world quadrotors. We identify five critical factors and we develop a PPO-based training framework named SimpleFlight, which integrates these five techniques. We validate the efficacy of SimpleFlight on Crazyflie quadrotor, demonstrating that it achieves more than a 50% reduction in trajectory tracking error compared to state-of-the-art RL baselines, and achieves 70% improvement over the traditional MPC. The policy derived by SimpleFlight consistently excels across both smooth polynominal trajectories and challenging infeasible zigzag trajectories on small thrust-to-weight quadrotors. In contrast, baseline methods struggle with high-speed or infeasible trajectories. To support further research and reproducibility, we integrate SimpleFlight into a GPU-based simulator Omnidrones and provide open-source access to the code and model checkpoints. We hope SimpleFlight will offer valuable insights for advancing RL-based quadrotor control. For more details, visit our project website at https://sites.google.com/view/simpleflight/.
Parameterize Structure with Differentiable Template for 3D Shape Generation
Oct 15, 2024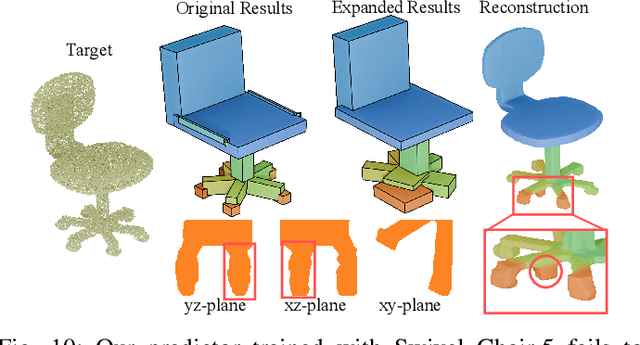
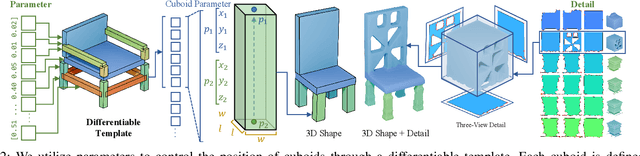
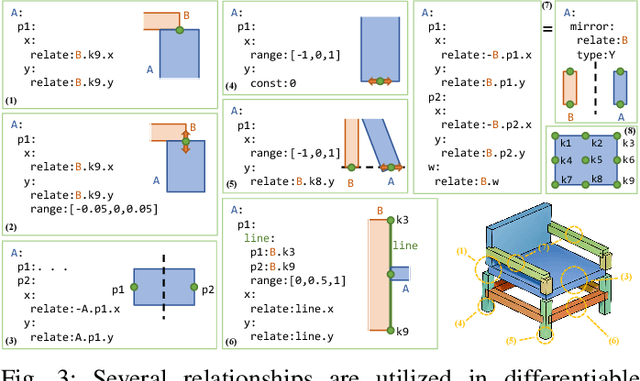
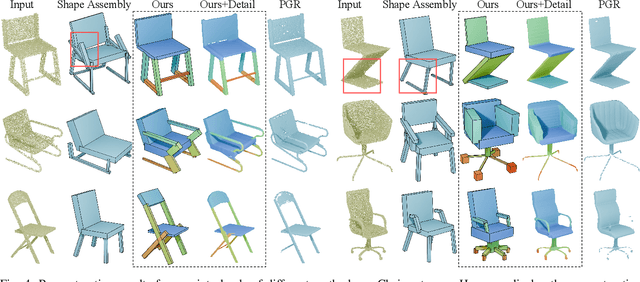
Structural representation is crucial for reconstructing and generating editable 3D shapes with part semantics. Recent 3D shape generation works employ complicated networks and structure definitions relying on hierarchical annotations and pay less attention to the details inside parts. In this paper, we propose the method that parameterizes the shared structure in the same category using a differentiable template and corresponding fixed-length parameters. Specific parameters are fed into the template to calculate cuboids that indicate a concrete shape. We utilize the boundaries of three-view drawings of each cuboid to further describe the inside details. Shapes are represented with the parameters and three-view details inside cuboids, from which the SDF can be calculated to recover the object. Benefiting from our fixed-length parameters and three-view details, our networks for reconstruction and generation are simple and effective to learn the latent space. Our method can reconstruct or generate diverse shapes with complicated details, and interpolate them smoothly. Extensive evaluations demonstrate the superiority of our method on reconstruction from point cloud, generation, and interpolation.