 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOmniFaceRig: Fully Automatic Inner-Mouth-Aware Face Rigging Across Diverse 3D Character Topologies
Jun 06, 2026Facial rigging - creating FACS-based blendshapes together with inner-mouth geometry (teeth, gums, and tongue) - remains a major bottleneck in 3D character production. Existing pipelines still require substantial designer effort, especially for manual landmark annotation, per-character template adjustment, and inner-mouth placement. We present OmniFaceRig, a fully automatic end-to-end pipeline that converts a static surface-only 3D character mesh, with no pre-modeled oral cavity, into an inner-mouth-aware FACS rig with up to 155 blendshapes, procedurally fitted teeth, gums, and tongue, and re-packed UV/texture. OmniFaceRig supports diverse topologies - humans, humanoids, long-muzzled animals (e.g., dogs, wolves, foxes), and short-muzzled animals (e.g., cats, bears, rabbits, tigers) - with no manual landmarks, no user-provided templates, and no per-asset setup. The pipeline combines hybrid VLM+CV riggability checking, multi-model face parsing, dense keypoint-driven template registration, procedural inner-mouth construction, and collision-aware blendshape transfer. For non-human characters, OmniFaceRig selects topology-specific face and inner-mouth templates and uses collision-aware inner-mouth fitting to reduce teeth-face intersections without exposing users to category-specific tuning. We also publicly release Omni-Bench, a freely available benchmark dataset of 1,000 biped 3D characters with FACS facial blendshapes and inner-mouth geometry, spanning humans, humanoids, cats, dogs, and other animals. Experiments show high final rigging success on screened Omni-Bench inputs, nearly complete face detection recall from the segmentation ensemble and reliable inner-mouth placement with low penetration. Together, OmniFaceRig provides an automatic path from static generated characters to animation-ready facial rigs across both human and non-human topologies.
AssetGen: Deployable 3D Asset Generation at Interactive Speed
May 22, 2026While 3D generation is progressing rapidly, recent work has often focused on obtaining high-resolution assets, leaving user experience and deployability as afterthoughts. We present AssetGen, a 3D generator that focuses instead on these two aspects. Given one reference image, in 30 seconds it produces a high-quality mesh with baked normals, a color texture, and a controlled polygon budget suitable for real-time rendering, including mobile use cases. The AssetGen Flash variant further reduces latency to 14 seconds for interactive and agentic creation loops. Our model generates the object geometry with a coarse-to-refine VecSet framework, which implements mesh simplification, cleaning, and normal baking on the GPU, and a fast parallel UV unwrapping. It then generates textures in a multi-view fashion, followed by backprojection and 3D inpainting. Model distillation, kernel optimization, and pipeline parallelization are co-designed to accelerate the system end-to-end. We introduce numerous automated and blind human evaluations and demonstrate competitive visual quality against leading commercial solutions in 30 seconds and preview-quality results in less than 15 seconds. The final result is a system that supports AI-assisted, deployable 3D content creation in interactive workflows.
AutoPartGen: Autogressive 3D Part Generation and Discovery
Jul 17, 2025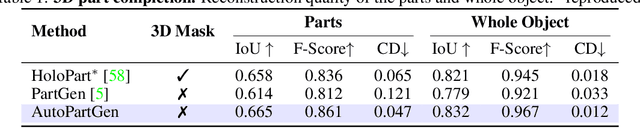
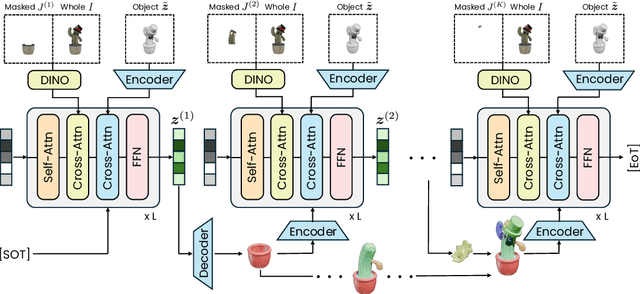

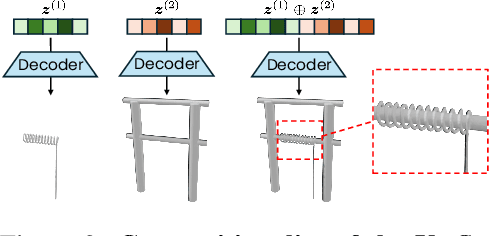
We introduce AutoPartGen, a model that generates objects composed of 3D parts in an autoregressive manner. This model can take as input an image of an object, 2D masks of the object's parts, or an existing 3D object, and generate a corresponding compositional 3D reconstruction. Our approach builds upon 3DShape2VecSet, a recent latent 3D representation with powerful geometric expressiveness. We observe that this latent space exhibits strong compositional properties, making it particularly well-suited for part-based generation tasks. Specifically, AutoPartGen generates object parts autoregressively, predicting one part at a time while conditioning on previously generated parts and additional inputs, such as 2D images, masks, or 3D objects. This process continues until the model decides that all parts have been generated, thus determining automatically the type and number of parts. The resulting parts can be seamlessly assembled into coherent objects or scenes without requiring additional optimization. We evaluate both the overall 3D generation capabilities and the part-level generation quality of AutoPartGen, demonstrating that it achieves state-of-the-art performance in 3D part generation.
VLM-3R: Vision-Language Models Augmented with Instruction-Aligned 3D Reconstruction
May 26, 2025The rapid advancement of Large Multimodal Models (LMMs) for 2D images and videos has motivated extending these models to understand 3D scenes, aiming for human-like visual-spatial intelligence. Nevertheless, achieving deep spatial understanding comparable to human capabilities poses significant challenges in model encoding and data acquisition. Existing methods frequently depend on external depth sensors for geometry capture or utilize off-the-shelf algorithms for pre-constructing 3D maps, thereby limiting their scalability, especially with prevalent monocular video inputs and for time-sensitive applications. In this work, we introduce VLM-3R, a unified framework for Vision-Language Models (VLMs) that incorporates 3D Reconstructive instruction tuning. VLM-3R processes monocular video frames by employing a geometry encoder to derive implicit 3D tokens that represent spatial understanding. Leveraging our Spatial-Visual-View Fusion and over 200K curated 3D reconstructive instruction tuning question-answer (QA) pairs, VLM-3R effectively aligns real-world spatial context with language instructions. This enables monocular 3D spatial assistance and embodied reasoning. To facilitate the evaluation of temporal reasoning, we introduce the Vision-Spatial-Temporal Intelligence benchmark, featuring over 138.6K QA pairs across five distinct tasks focused on evolving spatial relationships. Extensive experiments demonstrate that our model, VLM-3R, not only facilitates robust visual-spatial reasoning but also enables the understanding of temporal 3D context changes, excelling in both accuracy and scalability.
Steepest Descent Density Control for Compact 3D Gaussian Splatting
May 08, 20253D Gaussian Splatting (3DGS) has emerged as a powerful technique for real-time, high-resolution novel view synthesis. By representing scenes as a mixture of Gaussian primitives, 3DGS leverages GPU rasterization pipelines for efficient rendering and reconstruction. To optimize scene coverage and capture fine details, 3DGS employs a densification algorithm to generate additional points. However, this process often leads to redundant point clouds, resulting in excessive memory usage, slower performance, and substantial storage demands - posing significant challenges for deployment on resource-constrained devices. To address this limitation, we propose a theoretical framework that demystifies and improves density control in 3DGS. Our analysis reveals that splitting is crucial for escaping saddle points. Through an optimization-theoretic approach, we establish the necessary conditions for densification, determine the minimal number of offspring Gaussians, identify the optimal parameter update direction, and provide an analytical solution for normalizing off-spring opacity. Building on these insights, we introduce SteepGS, incorporating steepest density control, a principled strategy that minimizes loss while maintaining a compact point cloud. SteepGS achieves a ~50% reduction in Gaussian points without compromising rendering quality, significantly enhancing both efficiency and scalability.
LIRM: Large Inverse Rendering Model for Progressive Reconstruction of Shape, Materials and View-dependent Radiance Fields
Apr 28, 2025We present Large Inverse Rendering Model (LIRM), a transformer architecture that jointly reconstructs high-quality shape, materials, and radiance fields with view-dependent effects in less than a second. Our model builds upon the recent Large Reconstruction Models (LRMs) that achieve state-of-the-art sparse-view reconstruction quality. However, existing LRMs struggle to reconstruct unseen parts accurately and cannot recover glossy appearance or generate relightable 3D contents that can be consumed by standard Graphics engines. To address these limitations, we make three key technical contributions to build a more practical multi-view 3D reconstruction framework. First, we introduce an update model that allows us to progressively add more input views to improve our reconstruction. Second, we propose a hexa-plane neural SDF representation to better recover detailed textures, geometry and material parameters. Third, we develop a novel neural directional-embedding mechanism to handle view-dependent effects. Trained on a large-scale shape and material dataset with a tailored coarse-to-fine training scheme, our model achieves compelling results. It compares favorably to optimization-based dense-view inverse rendering methods in terms of geometry and relighting accuracy, while requiring only a fraction of the inference time.
UVGS: Reimagining Unstructured 3D Gaussian Splatting using UV Mapping
Feb 03, 20253D Gaussian Splatting (3DGS) has demonstrated superior quality in modeling 3D objects and scenes. However, generating 3DGS remains challenging due to their discrete, unstructured, and permutation-invariant nature. In this work, we present a simple yet effective method to overcome these challenges. We utilize spherical mapping to transform 3DGS into a structured 2D representation, termed UVGS. UVGS can be viewed as multi-channel images, with feature dimensions as a concatenation of Gaussian attributes such as position, scale, color, opacity, and rotation. We further find that these heterogeneous features can be compressed into a lower-dimensional (e.g., 3-channel) shared feature space using a carefully designed multi-branch network. The compressed UVGS can be treated as typical RGB images. Remarkably, we discover that typical VAEs trained with latent diffusion models can directly generalize to this new representation without additional training. Our novel representation makes it effortless to leverage foundational 2D models, such as diffusion models, to directly model 3DGS. Additionally, one can simply increase the 2D UV resolution to accommodate more Gaussians, making UVGS a scalable solution compared to typical 3D backbones. This approach immediately unlocks various novel generation applications of 3DGS by inherently utilizing the already developed superior 2D generation capabilities. In our experiments, we demonstrate various unconditional, conditional generation, and inpainting applications of 3DGS based on diffusion models, which were previously non-trivial.
VideoLifter: Lifting Videos to 3D with Fast Hierarchical Stereo Alignment
Jan 03, 2025



Efficiently reconstructing accurate 3D models from monocular video is a key challenge in computer vision, critical for advancing applications in virtual reality, robotics, and scene understanding. Existing approaches typically require pre-computed camera parameters and frame-by-frame reconstruction pipelines, which are prone to error accumulation and entail significant computational overhead. To address these limitations, we introduce VideoLifter, a novel framework that leverages geometric priors from a learnable model to incrementally optimize a globally sparse to dense 3D representation directly from video sequences. VideoLifter segments the video sequence into local windows, where it matches and registers frames, constructs consistent fragments, and aligns them hierarchically to produce a unified 3D model. By tracking and propagating sparse point correspondences across frames and fragments, VideoLifter incrementally refines camera poses and 3D structure, minimizing reprojection error for improved accuracy and robustness. This approach significantly accelerates the reconstruction process, reducing training time by over 82% while surpassing current state-of-the-art methods in visual fidelity and computational efficiency.
3D Mesh Editing using Masked LRMs
Dec 11, 2024We present a novel approach to mesh shape editing, building on recent progress in 3D reconstruction from multi-view images. We formulate shape editing as a conditional reconstruction problem, where the model must reconstruct the input shape with the exception of a specified 3D region, in which the geometry should be generated from the conditional signal. To this end, we train a conditional Large Reconstruction Model (LRM) for masked reconstruction, using multi-view consistent masks rendered from a randomly generated 3D occlusion, and using one clean viewpoint as the conditional signal. During inference, we manually define a 3D region to edit and provide an edited image from a canonical viewpoint to fill in that region. We demonstrate that, in just a single forward pass, our method not only preserves the input geometry in the unmasked region through reconstruction capabilities on par with SoTA, but is also expressive enough to perform a variety of mesh edits from a single image guidance that past works struggle with, while being 10x faster than the top-performing competing prior work.
MV-DUSt3R+: Single-Stage Scene Reconstruction from Sparse Views In 2 Seconds
Dec 09, 2024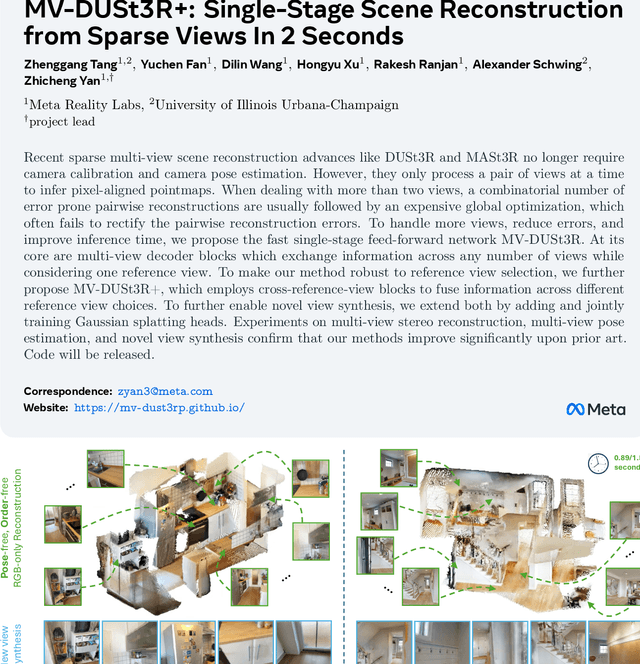
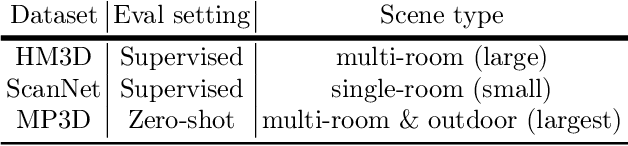
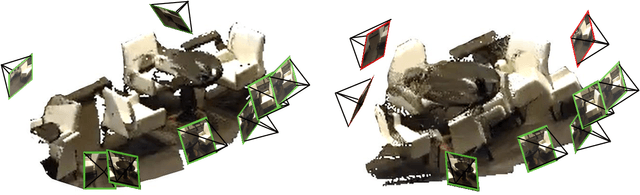
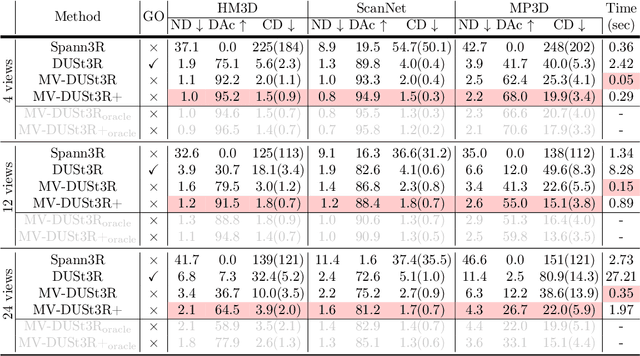
Recent sparse multi-view scene reconstruction advances like DUSt3R and MASt3R no longer require camera calibration and camera pose estimation. However, they only process a pair of views at a time to infer pixel-aligned pointmaps. When dealing with more than two views, a combinatorial number of error prone pairwise reconstructions are usually followed by an expensive global optimization, which often fails to rectify the pairwise reconstruction errors. To handle more views, reduce errors, and improve inference time, we propose the fast single-stage feed-forward network MV-DUSt3R. At its core are multi-view decoder blocks which exchange information across any number of views while considering one reference view. To make our method robust to reference view selection, we further propose MV-DUSt3R+, which employs cross-reference-view blocks to fuse information across different reference view choices. To further enable novel view synthesis, we extend both by adding and jointly training Gaussian splatting heads. Experiments on multi-view stereo reconstruction, multi-view pose estimation, and novel view synthesis confirm that our methods improve significantly upon prior art. Code will be released.