 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVLM-3R: Vision-Language Models Augmented with Instruction-Aligned 3D Reconstruction
May 26, 2025The rapid advancement of Large Multimodal Models (LMMs) for 2D images and videos has motivated extending these models to understand 3D scenes, aiming for human-like visual-spatial intelligence. Nevertheless, achieving deep spatial understanding comparable to human capabilities poses significant challenges in model encoding and data acquisition. Existing methods frequently depend on external depth sensors for geometry capture or utilize off-the-shelf algorithms for pre-constructing 3D maps, thereby limiting their scalability, especially with prevalent monocular video inputs and for time-sensitive applications. In this work, we introduce VLM-3R, a unified framework for Vision-Language Models (VLMs) that incorporates 3D Reconstructive instruction tuning. VLM-3R processes monocular video frames by employing a geometry encoder to derive implicit 3D tokens that represent spatial understanding. Leveraging our Spatial-Visual-View Fusion and over 200K curated 3D reconstructive instruction tuning question-answer (QA) pairs, VLM-3R effectively aligns real-world spatial context with language instructions. This enables monocular 3D spatial assistance and embodied reasoning. To facilitate the evaluation of temporal reasoning, we introduce the Vision-Spatial-Temporal Intelligence benchmark, featuring over 138.6K QA pairs across five distinct tasks focused on evolving spatial relationships. Extensive experiments demonstrate that our model, VLM-3R, not only facilitates robust visual-spatial reasoning but also enables the understanding of temporal 3D context changes, excelling in both accuracy and scalability.
MV-DUSt3R+: Single-Stage Scene Reconstruction from Sparse Views In 2 Seconds
Dec 09, 2024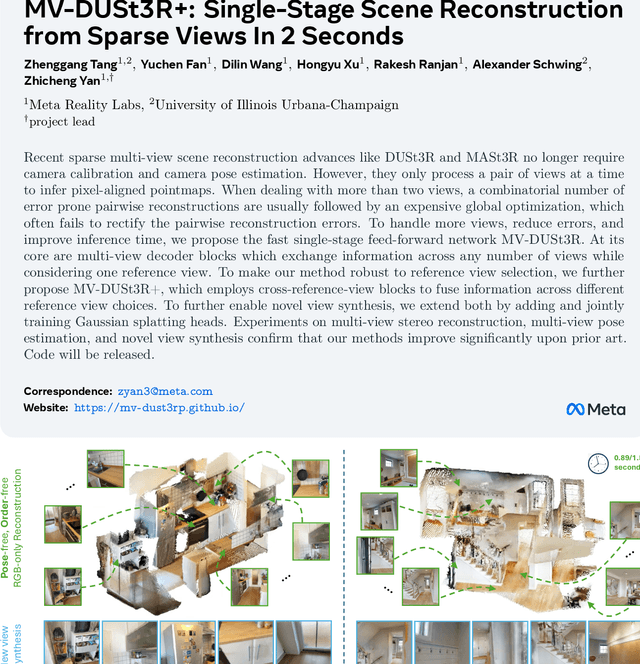
Recent sparse multi-view scene reconstruction advances like DUSt3R and MASt3R no longer require camera calibration and camera pose estimation. However, they only process a pair of views at a time to infer pixel-aligned pointmaps. When dealing with more than two views, a combinatorial number of error prone pairwise reconstructions are usually followed by an expensive global optimization, which often fails to rectify the pairwise reconstruction errors. To handle more views, reduce errors, and improve inference time, we propose the fast single-stage feed-forward network MV-DUSt3R. At its core are multi-view decoder blocks which exchange information across any number of views while considering one reference view. To make our method robust to reference view selection, we further propose MV-DUSt3R+, which employs cross-reference-view blocks to fuse information across different reference view choices. To further enable novel view synthesis, we extend both by adding and jointly training Gaussian splatting heads. Experiments on multi-view stereo reconstruction, multi-view pose estimation, and novel view synthesis confirm that our methods improve significantly upon prior art. Code will be released.
Enhancing 2D Representation Learning with a 3D Prior
Jun 04, 2024



Learning robust and effective representations of visual data is a fundamental task in computer vision. Traditionally, this is achieved by training models with labeled data which can be expensive to obtain. Self-supervised learning attempts to circumvent the requirement for labeled data by learning representations from raw unlabeled visual data alone. However, unlike humans who obtain rich 3D information from their binocular vision and through motion, the majority of current self-supervised methods are tasked with learning from monocular 2D image collections. This is noteworthy as it has been demonstrated that shape-centric visual processing is more robust compared to texture-biased automated methods. Inspired by this, we propose a new approach for strengthening existing self-supervised methods by explicitly enforcing a strong 3D structural prior directly into the model during training. Through experiments, across a range of datasets, we demonstrate that our 3D aware representations are more robust compared to conventional self-supervised baselines.
EgoObjects: A Large-Scale Egocentric Dataset for Fine-Grained Object Understanding
Sep 15, 2023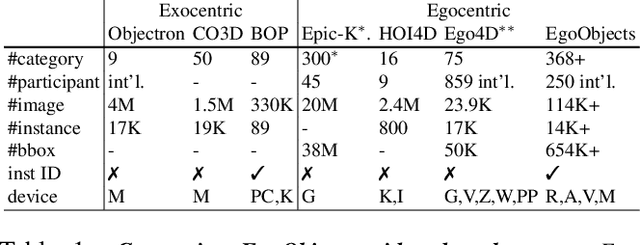

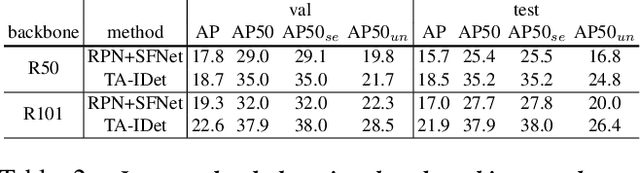
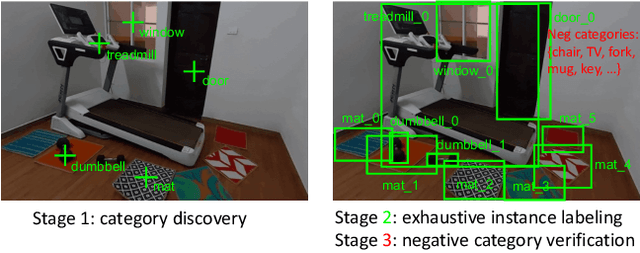
Object understanding in egocentric visual data is arguably a fundamental research topic in egocentric vision. However, existing object datasets are either non-egocentric or have limitations in object categories, visual content, and annotation granularities. In this work, we introduce EgoObjects, a large-scale egocentric dataset for fine-grained object understanding. Its Pilot version contains over 9K videos collected by 250 participants from 50+ countries using 4 wearable devices, and over 650K object annotations from 368 object categories. Unlike prior datasets containing only object category labels, EgoObjects also annotates each object with an instance-level identifier, and includes over 14K unique object instances. EgoObjects was designed to capture the same object under diverse background complexities, surrounding objects, distance, lighting and camera motion. In parallel to the data collection, we conducted data annotation by developing a multi-stage federated annotation process to accommodate the growing nature of the dataset. To bootstrap the research on EgoObjects, we present a suite of 4 benchmark tasks around the egocentric object understanding, including a novel instance level- and the classical category level object detection. Moreover, we also introduce 2 novel continual learning object detection tasks. The dataset and API are available at https://github.com/facebookresearch/EgoObjects.
Exploring Open-Vocabulary Semantic Segmentation without Human Labels
Jun 01, 2023Semantic segmentation is a crucial task in computer vision that involves segmenting images into semantically meaningful regions at the pixel level. However, existing approaches often rely on expensive human annotations as supervision for model training, limiting their scalability to large, unlabeled datasets. To address this challenge, we present ZeroSeg, a novel method that leverages the existing pretrained vision-language (VL) model (e.g. CLIP) to train open-vocabulary zero-shot semantic segmentation models. Although acquired extensive knowledge of visual concepts, it is non-trivial to exploit knowledge from these VL models to the task of semantic segmentation, as they are usually trained at an image level. ZeroSeg overcomes this by distilling the visual concepts learned by VL models into a set of segment tokens, each summarizing a localized region of the target image. We evaluate ZeroSeg on multiple popular segmentation benchmarks, including PASCAL VOC 2012, PASCAL Context, and COCO, in a zero-shot manner (i.e., no training or adaption on target segmentation datasets). Our approach achieves state-of-the-art performance when compared to other zero-shot segmentation methods under the same training data, while also performing competitively compared to strongly supervised methods. Finally, we also demonstrated the effectiveness of ZeroSeg on open-vocabulary segmentation, through both human studies and qualitative visualizations.
Going Denser with Open-Vocabulary Part Segmentation
May 18, 2023Object detection has been expanded from a limited number of categories to open vocabulary. Moving forward, a complete intelligent vision system requires understanding more fine-grained object descriptions, object parts. In this paper, we propose a detector with the ability to predict both open-vocabulary objects and their part segmentation. This ability comes from two designs. First, we train the detector on the joint of part-level, object-level and image-level data to build the multi-granularity alignment between language and image. Second, we parse the novel object into its parts by its dense semantic correspondence with the base object. These two designs enable the detector to largely benefit from various data sources and foundation models. In open-vocabulary part segmentation experiments, our method outperforms the baseline by 3.3$\sim$7.3 mAP in cross-dataset generalization on PartImageNet, and improves the baseline by 7.3 novel AP$_{50}$ in cross-category generalization on Pascal Part. Finally, we train a detector that generalizes to a wide range of part segmentation datasets while achieving better performance than dataset-specific training.
3rd Continual Learning Workshop Challenge on Egocentric Category and Instance Level Object Understanding
Dec 13, 2022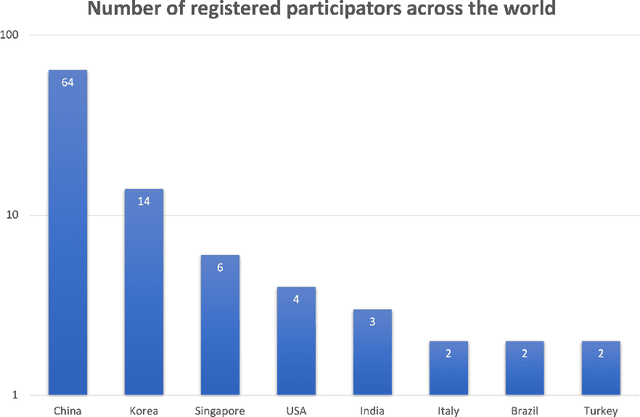
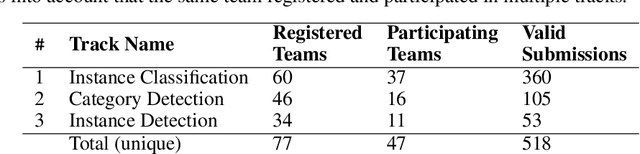


Continual Learning, also known as Lifelong or Incremental Learning, has recently gained renewed interest among the Artificial Intelligence research community. Recent research efforts have quickly led to the design of novel algorithms able to reduce the impact of the catastrophic forgetting phenomenon in deep neural networks. Due to this surge of interest in the field, many competitions have been held in recent years, as they are an excellent opportunity to stimulate research in promising directions. This paper summarizes the ideas, design choices, rules, and results of the challenge held at the 3rd Continual Learning in Computer Vision (CLVision) Workshop at CVPR 2022. The focus of this competition is the complex continual object detection task, which is still underexplored in literature compared to classification tasks. The challenge is based on the challenge version of the novel EgoObjects dataset, a large-scale egocentric object dataset explicitly designed to benchmark continual learning algorithms for egocentric category-/instance-level object understanding, which covers more than 1k unique main objects and 250+ categories in around 100k video frames.
Unified Transformer Tracker for Object Tracking
Mar 29, 2022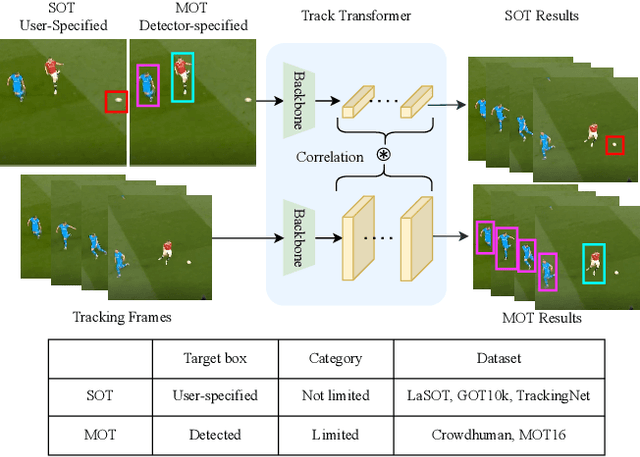
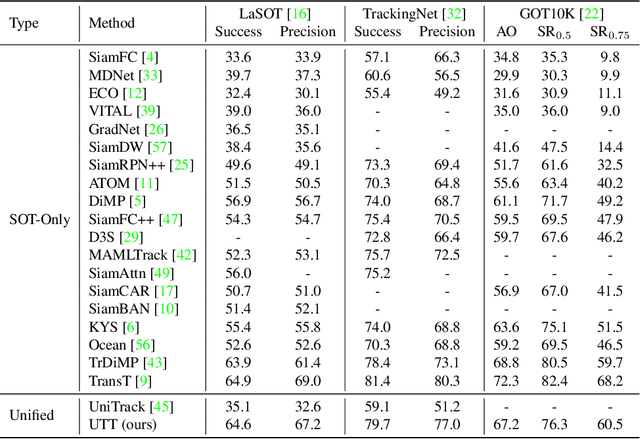
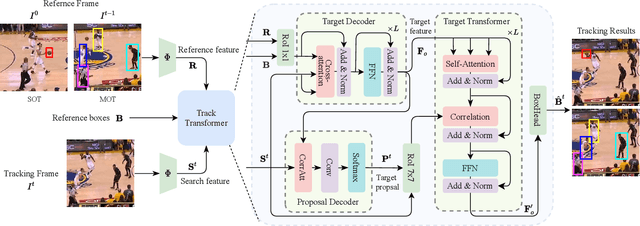
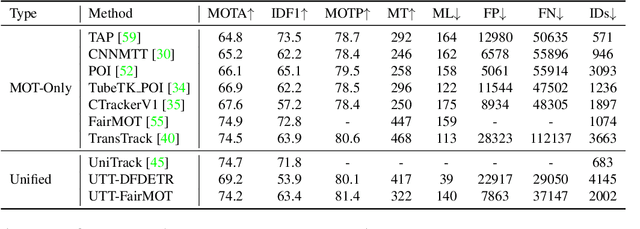
As an important area in computer vision, object tracking has formed two separate communities that respectively study Single Object Tracking (SOT) and Multiple Object Tracking (MOT). However, current methods in one tracking scenario are not easily adapted to the other due to the divergent training datasets and tracking objects of both tasks. Although UniTrack \cite{wang2021different} demonstrates that a shared appearance model with multiple heads can be used to tackle individual tracking tasks, it fails to exploit the large-scale tracking datasets for training and performs poorly on single object tracking. In this work, we present the Unified Transformer Tracker (UTT) to address tracking problems in different scenarios with one paradigm. A track transformer is developed in our UTT to track the target in both SOT and MOT. The correlation between the target and tracking frame features is exploited to localize the target. We demonstrate that both SOT and MOT tasks can be solved within this framework. The model can be simultaneously end-to-end trained by alternatively optimizing the SOT and MOT objectives on the datasets of individual tasks. Extensive experiments are conducted on several benchmarks with a unified model trained on SOT and MOT datasets. Code will be available at https://github.com/Flowerfan/Trackron.
Auto-X3D: Ultra-Efficient Video Understanding via Finer-Grained Neural Architecture Search
Dec 09, 2021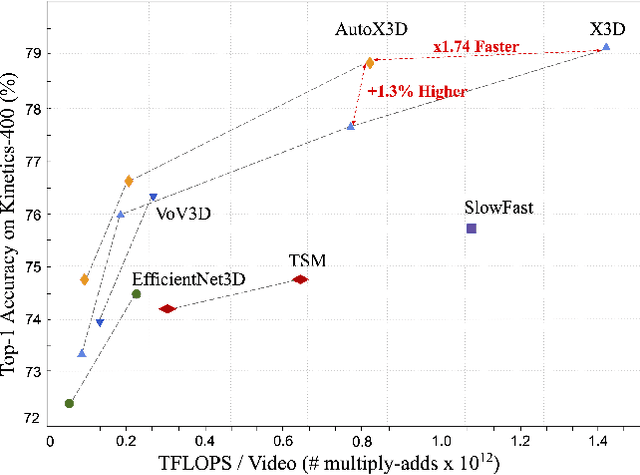
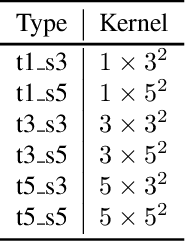
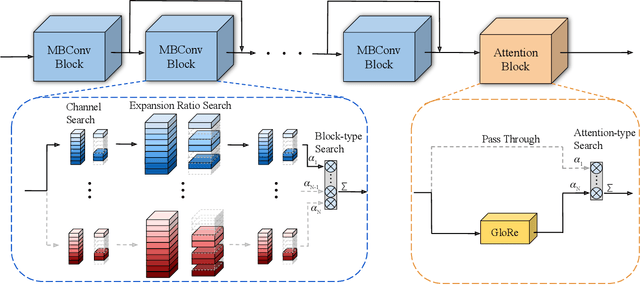
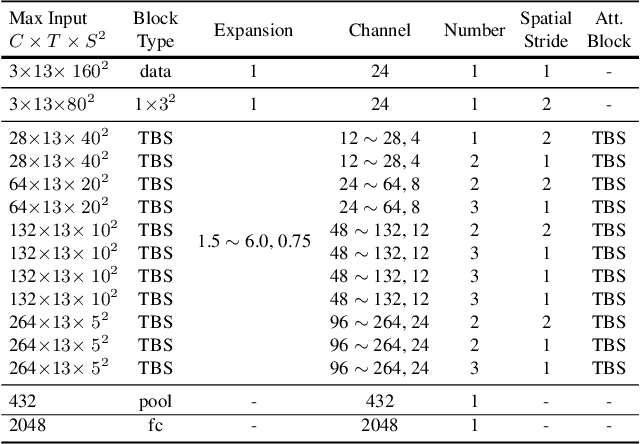
Efficient video architecture is the key to deploying video recognition systems on devices with limited computing resources. Unfortunately, existing video architectures are often computationally intensive and not suitable for such applications. The recent X3D work presents a new family of efficient video models by expanding a hand-crafted image architecture along multiple axes, such as space, time, width, and depth. Although operating in a conceptually large space, X3D searches one axis at a time, and merely explored a small set of 30 architectures in total, which does not sufficiently explore the space. This paper bypasses existing 2D architectures, and directly searched for 3D architectures in a fine-grained space, where block type, filter number, expansion ratio and attention block are jointly searched. A probabilistic neural architecture search method is adopted to efficiently search in such a large space. Evaluations on Kinetics and Something-Something-V2 benchmarks confirm our AutoX3D models outperform existing ones in accuracy up to 1.3% under similar FLOPs, and reduce the computational cost up to x1.74 when reaching similar performance.
Searching for Two-Stream Models in Multivariate Space for Video Recognition
Aug 30, 2021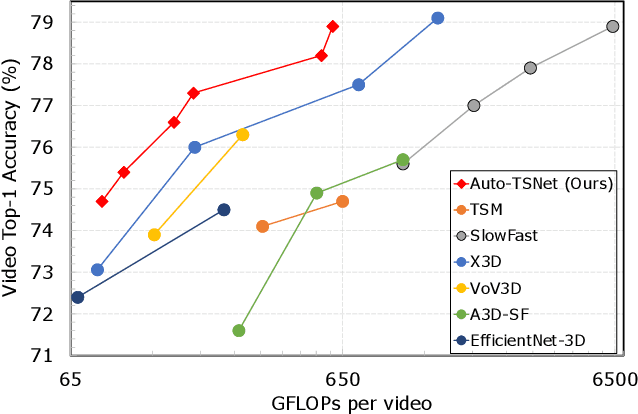
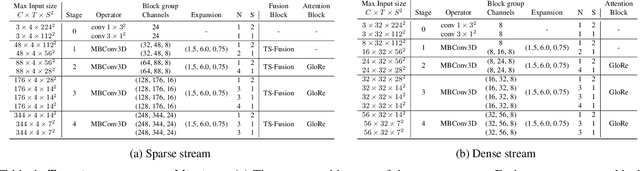
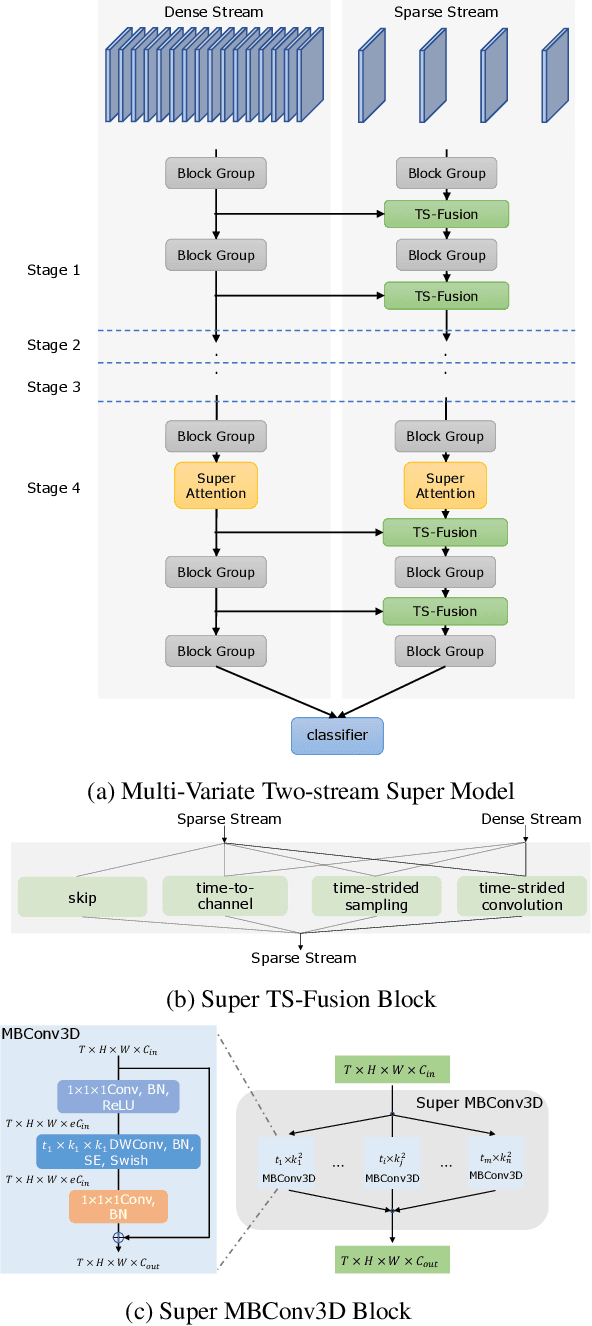

Conventional video models rely on a single stream to capture the complex spatial-temporal features. Recent work on two-stream video models, such as SlowFast network and AssembleNet, prescribe separate streams to learn complementary features, and achieve stronger performance. However, manually designing both streams as well as the in-between fusion blocks is a daunting task, requiring to explore a tremendously large design space. Such manual exploration is time-consuming and often ends up with sub-optimal architectures when computational resources are limited and the exploration is insufficient. In this work, we present a pragmatic neural architecture search approach, which is able to search for two-stream video models in giant spaces efficiently. We design a multivariate search space, including 6 search variables to capture a wide variety of choices in designing two-stream models. Furthermore, we propose a progressive search procedure, by searching for the architecture of individual streams, fusion blocks, and attention blocks one after the other. We demonstrate two-stream models with significantly better performance can be automatically discovered in our design space. Our searched two-stream models, namely Auto-TSNet, consistently outperform other models on standard benchmarks. On Kinetics, compared with the SlowFast model, our Auto-TSNet-L model reduces FLOPS by nearly 11 times while achieving the same accuracy 78.9%. On Something-Something-V2, Auto-TSNet-M improves the accuracy by at least 2% over other methods which use less than 50 GFLOPS per video.