 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDigital Twin Catalog: A Large-Scale Photorealistic 3D Object Digital Twin Dataset
Apr 11, 2025



We introduce Digital Twin Catalog (DTC), a new large-scale photorealistic 3D object digital twin dataset. A digital twin of a 3D object is a highly detailed, virtually indistinguishable representation of a physical object, accurately capturing its shape, appearance, physical properties, and other attributes. Recent advances in neural-based 3D reconstruction and inverse rendering have significantly improved the quality of 3D object reconstruction. Despite these advancements, there remains a lack of a large-scale, digital twin quality real-world dataset and benchmark that can quantitatively assess and compare the performance of different reconstruction methods, as well as improve reconstruction quality through training or fine-tuning. Moreover, to democratize 3D digital twin creation, it is essential to integrate creation techniques with next-generation egocentric computing platforms, such as AR glasses. Currently, there is no dataset available to evaluate 3D object reconstruction using egocentric captured images. To address these gaps, the DTC dataset features 2,000 scanned digital twin-quality 3D objects, along with image sequences captured under different lighting conditions using DSLR cameras and egocentric AR glasses. This dataset establishes the first comprehensive real-world evaluation benchmark for 3D digital twin creation tasks, offering a robust foundation for comparing and improving existing reconstruction methods. The DTC dataset is already released at https://www.projectaria.com/datasets/dtc/ and we will also make the baseline evaluations open-source.
View-Invariant Policy Learning via Zero-Shot Novel View Synthesis
Sep 05, 2024Large-scale visuomotor policy learning is a promising approach toward developing generalizable manipulation systems. Yet, policies that can be deployed on diverse embodiments, environments, and observational modalities remain elusive. In this work, we investigate how knowledge from large-scale visual data of the world may be used to address one axis of variation for generalizable manipulation: observational viewpoint. Specifically, we study single-image novel view synthesis models, which learn 3D-aware scene-level priors by rendering images of the same scene from alternate camera viewpoints given a single input image. For practical application to diverse robotic data, these models must operate zero-shot, performing view synthesis on unseen tasks and environments. We empirically analyze view synthesis models within a simple data-augmentation scheme that we call View Synthesis Augmentation (VISTA) to understand their capabilities for learning viewpoint-invariant policies from single-viewpoint demonstration data. Upon evaluating the robustness of policies trained with our method to out-of-distribution camera viewpoints, we find that they outperform baselines in both simulated and real-world manipulation tasks. Videos and additional visualizations are available at https://s-tian.github.io/projects/vista.
RoboPack: Learning Tactile-Informed Dynamics Models for Dense Packing
Jul 01, 2024



Tactile feedback is critical for understanding the dynamics of both rigid and deformable objects in many manipulation tasks, such as non-prehensile manipulation and dense packing. We introduce an approach that combines visual and tactile sensing for robotic manipulation by learning a neural, tactile-informed dynamics model. Our proposed framework, RoboPack, employs a recurrent graph neural network to estimate object states, including particles and object-level latent physics information, from historical visuo-tactile observations and to perform future state predictions. Our tactile-informed dynamics model, learned from real-world data, can solve downstream robotics tasks with model-predictive control. We demonstrate our approach on a real robot equipped with a compliant Soft-Bubble tactile sensor on non-prehensile manipulation and dense packing tasks, where the robot must infer the physics properties of objects from direct and indirect interactions. Trained on only an average of 30 minutes of real-world interaction data per task, our model can perform online adaptation and make touch-informed predictions. Through extensive evaluations in both long-horizon dynamics prediction and real-world manipulation, our method demonstrates superior effectiveness compared to previous learning-based and physics-based simulation systems.
DROID: A Large-Scale In-The-Wild Robot Manipulation Dataset
Mar 19, 2024



The creation of large, diverse, high-quality robot manipulation datasets is an important stepping stone on the path toward more capable and robust robotic manipulation policies. However, creating such datasets is challenging: collecting robot manipulation data in diverse environments poses logistical and safety challenges and requires substantial investments in hardware and human labour. As a result, even the most general robot manipulation policies today are mostly trained on data collected in a small number of environments with limited scene and task diversity. In this work, we introduce DROID (Distributed Robot Interaction Dataset), a diverse robot manipulation dataset with 76k demonstration trajectories or 350 hours of interaction data, collected across 564 scenes and 84 tasks by 50 data collectors in North America, Asia, and Europe over the course of 12 months. We demonstrate that training with DROID leads to policies with higher performance and improved generalization ability. We open source the full dataset, policy learning code, and a detailed guide for reproducing our robot hardware setup.
Foundation Models in Robotics: Applications, Challenges, and the Future
Dec 13, 2023


We survey applications of pretrained foundation models in robotics. Traditional deep learning models in robotics are trained on small datasets tailored for specific tasks, which limits their adaptability across diverse applications. In contrast, foundation models pretrained on internet-scale data appear to have superior generalization capabilities, and in some instances display an emergent ability to find zero-shot solutions to problems that are not present in the training data. Foundation models may hold the potential to enhance various components of the robot autonomy stack, from perception to decision-making and control. For example, large language models can generate code or provide common sense reasoning, while vision-language models enable open-vocabulary visual recognition. However, significant open research challenges remain, particularly around the scarcity of robot-relevant training data, safety guarantees and uncertainty quantification, and real-time execution. In this survey, we study recent papers that have used or built foundation models to solve robotics problems. We explore how foundation models contribute to improving robot capabilities in the domains of perception, decision-making, and control. We discuss the challenges hindering the adoption of foundation models in robot autonomy and provide opportunities and potential pathways for future advancements. The GitHub project corresponding to this paper (Preliminary release. We are committed to further enhancing and updating this work to ensure its quality and relevance) can be found here: https://github.com/robotics-survey/Awesome-Robotics-Foundation-Models
Are These the Same Apple? Comparing Images Based on Object Intrinsics
Nov 01, 2023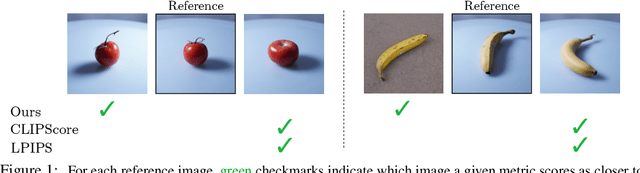



The human visual system can effortlessly recognize an object under different extrinsic factors such as lighting, object poses, and background, yet current computer vision systems often struggle with these variations. An important step to understanding and improving artificial vision systems is to measure image similarity purely based on intrinsic object properties that define object identity. This problem has been studied in the computer vision literature as re-identification, though mostly restricted to specific object categories such as people and cars. We propose to extend it to general object categories, exploring an image similarity metric based on object intrinsics. To benchmark such measurements, we collect the Common paired objects Under differenT Extrinsics (CUTE) dataset of $18,000$ images of $180$ objects under different extrinsic factors such as lighting, poses, and imaging conditions. While existing methods such as LPIPS and CLIP scores do not measure object intrinsics well, we find that combining deep features learned from contrastive self-supervised learning with foreground filtering is a simple yet effective approach to approximating the similarity. We conduct an extensive survey of pre-trained features and foreground extraction methods to arrive at a strong baseline that best measures intrinsic object-centric image similarity among current methods. Finally, we demonstrate that our approach can aid in downstream applications such as acting as an analog for human subjects and improving generalizable re-identification. Please see our project website at https://s-tian.github.io/projects/cute/ for visualizations of the data and demos of our metric.
Learning to Design and Use Tools for Robotic Manipulation
Nov 01, 2023
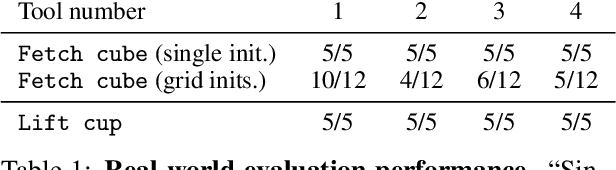


When limited by their own morphologies, humans and some species of animals have the remarkable ability to use objects from the environment toward accomplishing otherwise impossible tasks. Robots might similarly unlock a range of additional capabilities through tool use. Recent techniques for jointly optimizing morphology and control via deep learning are effective at designing locomotion agents. But while outputting a single morphology makes sense for locomotion, manipulation involves a variety of strategies depending on the task goals at hand. A manipulation agent must be capable of rapidly prototyping specialized tools for different goals. Therefore, we propose learning a designer policy, rather than a single design. A designer policy is conditioned on task information and outputs a tool design that helps solve the task. A design-conditioned controller policy can then perform manipulation using these tools. In this work, we take a step towards this goal by introducing a reinforcement learning framework for jointly learning these policies. Through simulated manipulation tasks, we show that this framework is more sample efficient than prior methods in multi-goal or multi-variant settings, can perform zero-shot interpolation or fine-tuning to tackle previously unseen goals, and allows tradeoffs between the complexity of design and control policies under practical constraints. Finally, we deploy our learned policies onto a real robot. Please see our supplementary video and website at https://robotic-tool-design.github.io/ for visualizations.
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Oct 17, 2023



Large, high-capacity models trained on diverse datasets have shown remarkable successes on efficiently tackling downstream applications. In domains from NLP to Computer Vision, this has led to a consolidation of pretrained models, with general pretrained backbones serving as a starting point for many applications. Can such a consolidation happen in robotics? Conventionally, robotic learning methods train a separate model for every application, every robot, and even every environment. Can we instead train generalist X-robot policy that can be adapted efficiently to new robots, tasks, and environments? In this paper, we provide datasets in standardized data formats and models to make it possible to explore this possibility in the context of robotic manipulation, alongside experimental results that provide an example of effective X-robot policies. We assemble a dataset from 22 different robots collected through a collaboration between 21 institutions, demonstrating 527 skills (160266 tasks). We show that a high-capacity model trained on this data, which we call RT-X, exhibits positive transfer and improves the capabilities of multiple robots by leveraging experience from other platforms. More details can be found on the project website $\href{https://robotics-transformer-x.github.io}{\text{robotics-transformer-x.github.io}}$.
Multi-Object Manipulation via Object-Centric Neural Scattering Functions
Jun 14, 2023Learned visual dynamics models have proven effective for robotic manipulation tasks. Yet, it remains unclear how best to represent scenes involving multi-object interactions. Current methods decompose a scene into discrete objects, but they struggle with precise modeling and manipulation amid challenging lighting conditions as they only encode appearance tied with specific illuminations. In this work, we propose using object-centric neural scattering functions (OSFs) as object representations in a model-predictive control framework. OSFs model per-object light transport, enabling compositional scene re-rendering under object rearrangement and varying lighting conditions. By combining this approach with inverse parameter estimation and graph-based neural dynamics models, we demonstrate improved model-predictive control performance and generalization in compositional multi-object environments, even in previously unseen scenarios and harsh lighting conditions.
A Control-Centric Benchmark for Video Prediction
Apr 26, 2023Video is a promising source of knowledge for embodied agents to learn models of the world's dynamics. Large deep networks have become increasingly effective at modeling complex video data in a self-supervised manner, as evaluated by metrics based on human perceptual similarity or pixel-wise comparison. However, it remains unclear whether current metrics are accurate indicators of performance on downstream tasks. We find empirically that for planning robotic manipulation, existing metrics can be unreliable at predicting execution success. To address this, we propose a benchmark for action-conditioned video prediction in the form of a control benchmark that evaluates a given model for simulated robotic manipulation through sampling-based planning. Our benchmark, Video Prediction for Visual Planning ($VP^2$), includes simulated environments with 11 task categories and 310 task instance definitions, a full planning implementation, and training datasets containing scripted interaction trajectories for each task category. A central design goal of our benchmark is to expose a simple interface -- a single forward prediction call -- so it is straightforward to evaluate almost any action-conditioned video prediction model. We then leverage our benchmark to study the effects of scaling model size, quantity of training data, and model ensembling by analyzing five highly-performant video prediction models, finding that while scale can improve perceptual quality when modeling visually diverse settings, other attributes such as uncertainty awareness can also aid planning performance.