 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenRoboCare: A Multimodal Multi-Task Expert Demonstration Dataset for Robot Caregiving
Nov 17, 2025We present OpenRoboCare, a multimodal dataset for robot caregiving, capturing expert occupational therapist demonstrations of Activities of Daily Living (ADLs). Caregiving tasks involve complex physical human-robot interactions, requiring precise perception under occlusions, safe physical contact, and long-horizon planning. While recent advances in robot learning from demonstrations have shown promise, there is a lack of a large-scale, diverse, and expert-driven dataset that captures real-world caregiving routines. To address this gap, we collect data from 21 occupational therapists performing 15 ADL tasks on two manikins. The dataset spans five modalities: RGB-D video, pose tracking, eye-gaze tracking, task and action annotations, and tactile sensing, providing rich multimodal insights into caregiver movement, attention, force application, and task execution strategies. We further analyze expert caregiving principles and strategies, offering insights to improve robot efficiency and task feasibility. Additionally, our evaluations demonstrate that OpenRoboCare presents challenges for state-of-the-art robot perception and human activity recognition methods, both critical for developing safe and adaptive assistive robots, highlighting the value of our contribution. See our website for additional visualizations: https://emprise.cs.cornell.edu/robo-care/.
FEAST: A Flexible Mealtime-Assistance System Towards In-the-Wild Personalization
Jun 17, 2025Physical caregiving robots hold promise for improving the quality of life of millions worldwide who require assistance with feeding. However, in-home meal assistance remains challenging due to the diversity of activities (e.g., eating, drinking, mouth wiping), contexts (e.g., socializing, watching TV), food items, and user preferences that arise during deployment. In this work, we propose FEAST, a flexible mealtime-assistance system that can be personalized in-the-wild to meet the unique needs of individual care recipients. Developed in collaboration with two community researchers and informed by a formative study with a diverse group of care recipients, our system is guided by three key tenets for in-the-wild personalization: adaptability, transparency, and safety. FEAST embodies these principles through: (i) modular hardware that enables switching between assisted feeding, drinking, and mouth-wiping, (ii) diverse interaction methods, including a web interface, head gestures, and physical buttons, to accommodate diverse functional abilities and preferences, and (iii) parameterized behavior trees that can be safely and transparently adapted using a large language model. We evaluate our system based on the personalization requirements identified in our formative study, demonstrating that FEAST offers a wide range of transparent and safe adaptations and outperforms a state-of-the-art baseline limited to fixed customizations. To demonstrate real-world applicability, we conduct an in-home user study with two care recipients (who are community researchers), feeding them three meals each across three diverse scenarios. We further assess FEAST's ecological validity by evaluating with an Occupational Therapist previously unfamiliar with the system. In all cases, users successfully personalize FEAST to meet their individual needs and preferences. Website: https://emprise.cs.cornell.edu/feast
Coloring Between the Lines: Personalization in the Null Space of Planning Constraints
May 21, 2025Generalist robots must personalize in-the-wild to meet the diverse needs and preferences of long-term users. How can we enable flexible personalization without sacrificing safety or competency? This paper proposes Coloring Between the Lines (CBTL), a method for personalization that exploits the null space of constraint satisfaction problems (CSPs) used in robot planning. CBTL begins with a CSP generator that ensures safe and competent behavior, then incrementally personalizes behavior by learning parameterized constraints from online interaction. By quantifying uncertainty and leveraging the compositionality of planning constraints, CBTL achieves sample-efficient adaptation without environment resets. We evaluate CBTL in (1) three diverse simulation environments; (2) a web-based user study; and (3) a real-robot assisted feeding system, finding that CBTL consistently achieves more effective personalization with fewer interactions than baselines. Our results demonstrate that CBTL provides a unified and practical approach for continual, flexible, active, and safe robot personalization. Website: https://emprise.cs.cornell.edu/cbtl/
GRACE: Generalizing Robot-Assisted Caregiving with User Functionality Embeddings
Jan 29, 2025Robot caregiving should be personalized to meet the diverse needs of care recipients -- assisting with tasks as needed, while taking user agency in action into account. In physical tasks such as handover, bathing, dressing, and rehabilitation, a key aspect of this diversity is the functional range of motion (fROM), which can vary significantly between individuals. In this work, we learn to predict personalized fROM as a way to generalize robot decision-making in a wide range of caregiving tasks. We propose a novel data-driven method for predicting personalized fROM using functional assessment scores from occupational therapy. We develop a neural model that learns to embed functional assessment scores into a latent representation of the user's physical function. The model is trained using motion capture data collected from users with emulated mobility limitations. After training, the model predicts personalized fROM for new users without motion capture. Through simulated experiments and a real-robot user study, we show that the personalized fROM predictions from our model enable the robot to provide personalized and effective assistance while improving the user's agency in action. See our website for more visualizations: https://emprise.cs.cornell.edu/grace/.
Non-reciprocal Beyond Diagonal RIS: Sum-Rate Maximization in Full-Duplex Communications
Dec 07, 2024



Reconfigurable intelligent surface (RIS) has been envisioned as a key technology in future wireless communication networks to enable smart radio environment. To further enhance the passive beamforming capability of RIS, beyond diagonal (BD)-RIS has been proposed considering reconfigurable interconnections among different RIS elements. BD-RIS has a unique feature that cannot be enabled by conventional diagonal RIS; it can be realized by non-reciprocal circuits and thus enables an asymmetric scattering matrix. This feature provides the capability to break the wireless channel reciprocity, and has the potential to benefit full-duplex (FD) systems. In this paper, we model the BD RIS-assisted FD systems, where the impact of BD-RIS non-reciprocity and that of structural scattering, which refers to the specular reflection generated by RIS when the RIS is turned OFF, are explicitly captured. To assess the benefits of non-reciprocal BD-RIS, we optimise the scattering matrix, precoder and combiner to maximize the DL and UL sum-rates in the FD system. To tackle this optimization problem, we propose an iterative algorithm based on block coordination descent (BCD) and penalty dual decomposition (PDD). Numerical results demonstrate surprising benefits of non-reciprocal BD-RIS that it can achieve much higher DL and UL sum-rates in the FD scenario than reciprocal BD-RIS and conventional diagonal RIS.
Non-reciprocal BD-RIS in Full-duplex Communications: A Perspective on Sum-rate Maximization
Nov 27, 2024Reconfigurable intelligent surface (RIS) has been envisioned as a key technology in future wireless communication networks to enable smart radio environment. To further enhance the passive beamforming capability of RIS, beyond diagonal (BD)-RIS has been proposed considering interconnections among different RIS elements. BD-RIS has a unique feature that cannot be enabled by conventional diagonal RIS; it can be realized by non-reciprocal circuits and thus has asymmetric scattering matrix. This feature provides probability to break the wireless channel reciprocity, and thus has potential to benefit the full-duplex (FD) system. In this paper, we model the BD RIS-assisted FD systems, where the impact of BD-RIS non-reciprocity and that of structural scattering, which refers to the virtual direct channel constructed by RIS when the RIS is turned OFF, are explicitly captured. To visualize the analysis, we propose to design the scattering matrix, precoder and combiner to maximize the DL and UL sum-rates in the FD system. To tackle this optimization problem, we propose an iterative algorithm based on block coordination descent (BCD) and penalty dual decomposition (PDD). Numerical results demonstrate surprising benefits of non-reciprocal BD-RIS that it can achieve higher DL and UL sum-rates in the FD scenario than reciprocal BD-RIS and conventional diagonal RIS.
REPeat: A Real2Sim2Real Approach for Pre-acquisition of Soft Food Items in Robot-assisted Feeding
Oct 13, 2024



The paper presents REPeat, a Real2Sim2Real framework designed to enhance bite acquisition in robot-assisted feeding for soft foods. It uses `pre-acquisition actions' such as pushing, cutting, and flipping to improve the success rate of bite acquisition actions such as skewering, scooping, and twirling. If the data-driven model predicts low success for direct bite acquisition, the system initiates a Real2Sim phase, reconstructing the food's geometry in a simulation. The robot explores various pre-acquisition actions in the simulation, then a Sim2Real step renders a photorealistic image to reassess success rates. If the success improves, the robot applies the action in reality. We evaluate the system on 15 diverse plates with 10 types of food items for a soft food diet, showing improvement in bite acquisition success rates by 27\% on average across all plates. See our project website at https://emprise.cs.cornell.edu/repeat.
Multi-Type Preference Learning: Empowering Preference-Based Reinforcement Learning with Equal Preferences
Sep 11, 2024

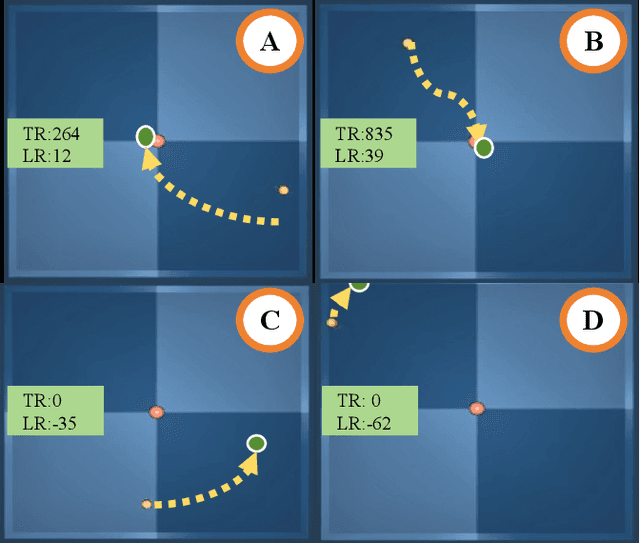
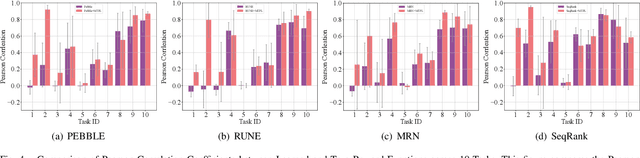
Preference-Based reinforcement learning (PBRL) learns directly from the preferences of human teachers regarding agent behaviors without needing meticulously designed reward functions. However, existing PBRL methods often learn primarily from explicit preferences, neglecting the possibility that teachers may choose equal preferences. This neglect may hinder the understanding of the agent regarding the task perspective of the teacher, leading to the loss of important information. To address this issue, we introduce the Equal Preference Learning Task, which optimizes the neural network by promoting similar reward predictions when the behaviors of two agents are labeled as equal preferences. Building on this task, we propose a novel PBRL method, Multi-Type Preference Learning (MTPL), which allows simultaneous learning from equal preferences while leveraging existing methods for learning from explicit preferences. To validate our approach, we design experiments applying MTPL to four existing state-of-the-art baselines across ten locomotion and robotic manipulation tasks in the DeepMind Control Suite. The experimental results indicate that simultaneous learning from both equal and explicit preferences enables the PBRL method to more comprehensively understand the feedback from teachers, thereby enhancing feedback efficiency.
Research on Tumors Segmentation based on Image Enhancement Method
Jun 07, 2024One of the most effective ways to treat liver cancer is to perform precise liver resection surgery, the key step of which includes precise digital image segmentation of the liver and its tumor. However, traditional liver parenchymal segmentation techniques often face several challenges in performing liver segmentation: lack of precision, slow processing speed, and computational burden. These shortcomings limit the efficiency of surgical planning and execution. In this work, the model initially describes in detail a new image enhancement algorithm that enhances the key features of an image by adaptively adjusting the contrast and brightness of the image. Then, a deep learning-based segmentation network was introduced, which was specially trained on the enhanced images to optimize the detection accuracy of tumor regions. In addition, multi-scale analysis techniques have been incorporated into the study, allowing the model to analyze images at different resolutions to capture more nuanced tumor features. In the presentation of the experimental results, the study used the 3Dircadb dataset to test the effectiveness of the proposed method. The experimental results show that compared with the traditional image segmentation method, the new method using image enhancement technology has significantly improved the accuracy and recall rate of tumor identification.
Investigation of Customized Medical Decision Algorithms Utilizing Graph Neural Networks
May 23, 2024



Aiming at the limitations of traditional medical decision system in processing large-scale heterogeneous medical data and realizing highly personalized recommendation, this paper introduces a personalized medical decision algorithm utilizing graph neural network (GNN). This research innovatively integrates graph neural network technology into the medical and health field, aiming to build a high-precision representation model of patient health status by mining the complex association between patients' clinical characteristics, genetic information, living habits. In this study, medical data is preprocessed to transform it into a graph structure, where nodes represent different data entities (such as patients, diseases, genes, etc.) and edges represent interactions or relationships between entities. The core of the algorithm is to design a novel multi-scale fusion mechanism, combining the historical medical records, physiological indicators and genetic characteristics of patients, to dynamically adjust the attention allocation strategy of the graph neural network, so as to achieve highly customized analysis of individual cases. In the experimental part, this study selected several publicly available medical data sets for validation, and the results showed that compared with traditional machine learning methods and a single graph neural network model, the proposed personalized medical decision algorithm showed significantly superior performance in terms of disease prediction accuracy, treatment effect evaluation and patient risk stratification.