 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenRoboCare: A Multimodal Multi-Task Expert Demonstration Dataset for Robot Caregiving
Nov 17, 2025We present OpenRoboCare, a multimodal dataset for robot caregiving, capturing expert occupational therapist demonstrations of Activities of Daily Living (ADLs). Caregiving tasks involve complex physical human-robot interactions, requiring precise perception under occlusions, safe physical contact, and long-horizon planning. While recent advances in robot learning from demonstrations have shown promise, there is a lack of a large-scale, diverse, and expert-driven dataset that captures real-world caregiving routines. To address this gap, we collect data from 21 occupational therapists performing 15 ADL tasks on two manikins. The dataset spans five modalities: RGB-D video, pose tracking, eye-gaze tracking, task and action annotations, and tactile sensing, providing rich multimodal insights into caregiver movement, attention, force application, and task execution strategies. We further analyze expert caregiving principles and strategies, offering insights to improve robot efficiency and task feasibility. Additionally, our evaluations demonstrate that OpenRoboCare presents challenges for state-of-the-art robot perception and human activity recognition methods, both critical for developing safe and adaptive assistive robots, highlighting the value of our contribution. See our website for additional visualizations: https://emprise.cs.cornell.edu/robo-care/.
GRACE: Generalizing Robot-Assisted Caregiving with User Functionality Embeddings
Jan 29, 2025Robot caregiving should be personalized to meet the diverse needs of care recipients -- assisting with tasks as needed, while taking user agency in action into account. In physical tasks such as handover, bathing, dressing, and rehabilitation, a key aspect of this diversity is the functional range of motion (fROM), which can vary significantly between individuals. In this work, we learn to predict personalized fROM as a way to generalize robot decision-making in a wide range of caregiving tasks. We propose a novel data-driven method for predicting personalized fROM using functional assessment scores from occupational therapy. We develop a neural model that learns to embed functional assessment scores into a latent representation of the user's physical function. The model is trained using motion capture data collected from users with emulated mobility limitations. After training, the model predicts personalized fROM for new users without motion capture. Through simulated experiments and a real-robot user study, we show that the personalized fROM predictions from our model enable the robot to provide personalized and effective assistance while improving the user's agency in action. See our website for more visualizations: https://emprise.cs.cornell.edu/grace/.
Feel the Bite: Robot-Assisted Inside-Mouth Bite Transfer using Robust Mouth Perception and Physical Interaction-Aware Control
Mar 06, 2024Robot-assisted feeding can greatly enhance the lives of those with mobility limitations. Modern feeding systems can pick up and position food in front of a care recipient's mouth for a bite. However, many with severe mobility constraints cannot lean forward and need direct inside-mouth food placement. This demands precision, especially for those with restricted mouth openings, and appropriately reacting to various physical interactions - incidental contacts as the utensil moves inside, impulsive contacts due to sudden muscle spasms, deliberate tongue maneuvers by the person being fed to guide the utensil, and intentional bites. In this paper, we propose an inside-mouth bite transfer system that addresses these challenges with two key components: a multi-view mouth perception pipeline robust to tool occlusion, and a control mechanism that employs multimodal time-series classification to discern and react to different physical interactions. We demonstrate the efficacy of these individual components through two ablation studies. In a full system evaluation, our system successfully fed 13 care recipients with diverse mobility challenges. Participants consistently emphasized the comfort and safety of our inside-mouth bite transfer system, and gave it high technology acceptance ratings - underscoring its transformative potential in real-world scenarios. Supplementary materials and videos can be found at http://emprise.cs.cornell.edu/bitetransfer/ .
RCareWorld: A Human-centric Simulation World for Caregiving Robots
Oct 19, 2022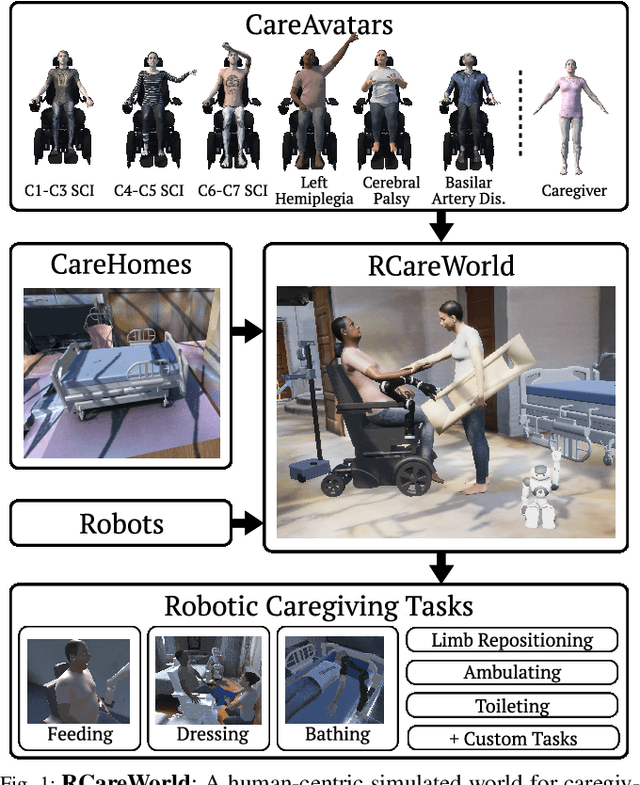
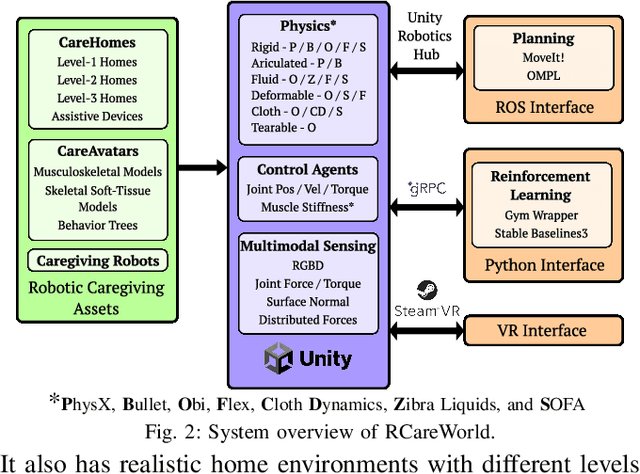
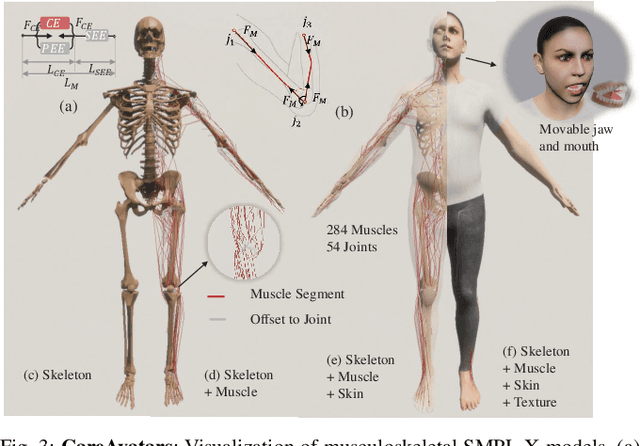
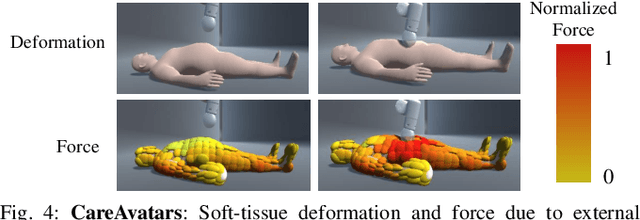
We present RCareWorld, a human-centric simulation world for physical and social robotic caregiving designed with inputs from stakeholders, including care recipients, caregivers, occupational therapists, and roboticists. RCareWorld has realistic human models of care recipients with mobility limitations and caregivers, home environments with multiple levels of accessibility and assistive devices, and robots commonly used for caregiving. It interfaces with various physics engines to model diverse material types necessary for simulating caregiving scenarios, and provides the capability to plan, control, and learn both human and robot control policies by integrating with state-of-the-art external planning and learning libraries, and VR devices. We propose a set of realistic caregiving tasks in RCareWorld as a benchmark for physical robotic caregiving and provide baseline control policies for them. We illustrate the high-fidelity simulation capabilities of RCareWorld by demonstrating the execution of a policy learnt in simulation for one of these tasks on a real-world setup. Additionally, we perform a real-world social robotic caregiving experiment using behaviors modeled in RCareWorld. Robotic caregiving, though potentially impactful towards enhancing the quality of life of care recipients and caregivers, is a field with many barriers to entry due to its interdisciplinary facets. RCareWorld takes the first step towards building a realistic simulation world for robotic caregiving that would enable researchers worldwide to contribute to this impactful field. Demo videos and supplementary materials can be found at: https://emprise.cs.cornell.edu/rcareworld/.