 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeveraging Large Language Models for Suicide Detection on Social Media with Limited Labels
Oct 06, 2024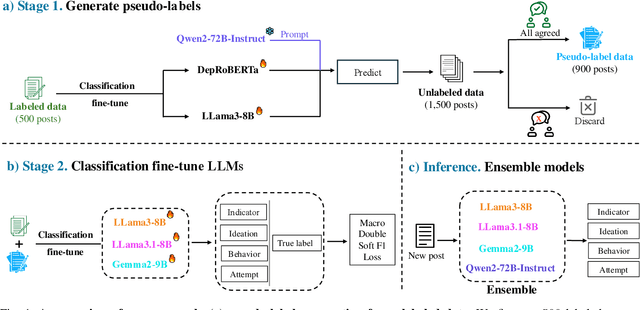
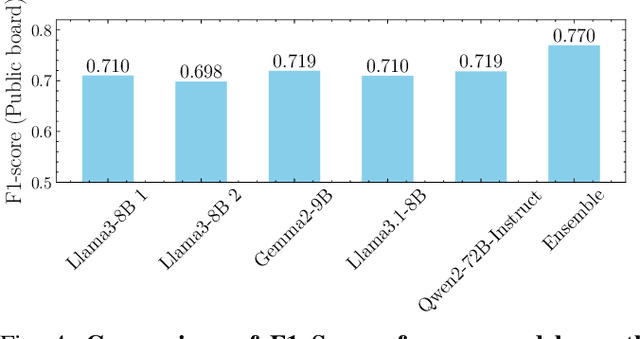
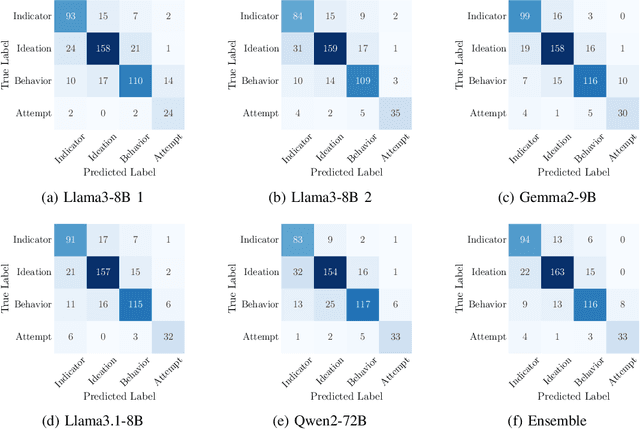
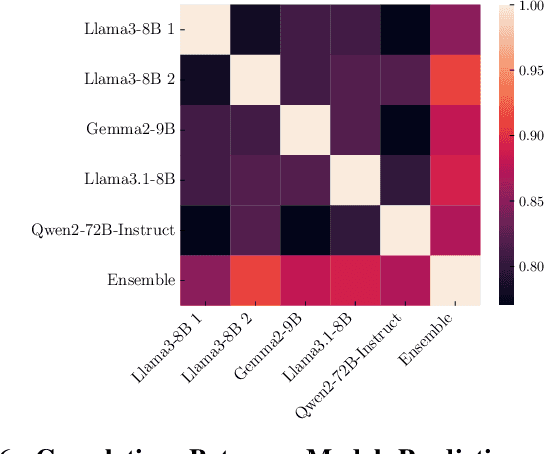
The increasing frequency of suicidal thoughts highlights the importance of early detection and intervention. Social media platforms, where users often share personal experiences and seek help, could be utilized to identify individuals at risk. However, the large volume of daily posts makes manual review impractical. This paper explores the use of Large Language Models (LLMs) to automatically detect suicidal content in text-based social media posts. We propose a novel method for generating pseudo-labels for unlabeled data by prompting LLMs, along with traditional classification fine-tuning techniques to enhance label accuracy. To create a strong suicide detection model, we develop an ensemble approach involving prompting with Qwen2-72B-Instruct, and using fine-tuned models such as Llama3-8B, Llama3.1-8B, and Gemma2-9B. We evaluate our approach on the dataset of the Suicide Ideation Detection on Social Media Challenge, a track of the IEEE Big Data 2024 Big Data Cup. Additionally, we conduct a comprehensive analysis to assess the impact of different models and fine-tuning strategies on detection performance. Experimental results show that the ensemble model significantly improves the detection accuracy, by 5% points compared with the individual models. It achieves a weight F1 score of 0.770 on the public test set, and 0.731 on the private test set, providing a promising solution for identifying suicidal content in social media. Our analysis shows that the choice of LLMs affects the prompting performance, with larger models providing better accuracy. Our code and checkpoints are publicly available at https://github.com/khanhvynguyen/Suicide_Detection_LLMs.
Independence in the Home: A Wearable Interface for a Person with Quadriplegia to Teleoperate a Mobile Manipulator
Jan 02, 2024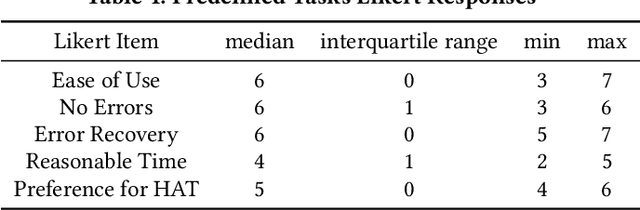
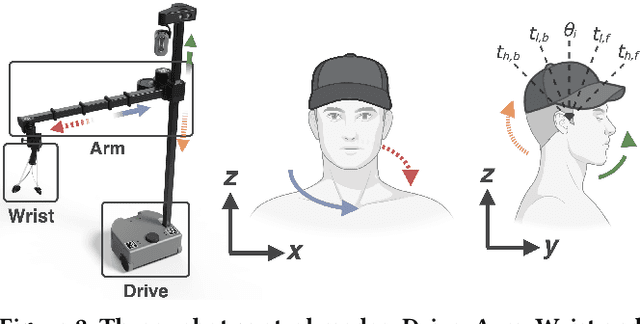
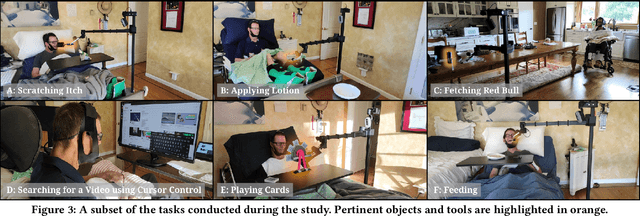
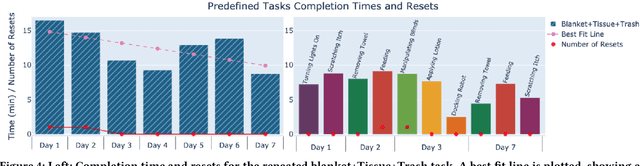
Teleoperation of mobile manipulators within a home environment can significantly enhance the independence of individuals with severe motor impairments, allowing them to regain the ability to perform self-care and household tasks. There is a critical need for novel teleoperation interfaces to offer effective alternatives for individuals with impairments who may encounter challenges in using existing interfaces due to physical limitations. In this work, we iterate on one such interface, HAT (Head-Worn Assistive Teleoperation), an inertial-based wearable integrated into any head-worn garment. We evaluate HAT through a 7-day in-home study with Henry Evans, a non-speaking individual with quadriplegia who has participated extensively in assistive robotics studies. We additionally evaluate HAT with a proposed shared control method for mobile manipulators termed Driver Assistance and demonstrate how the interface generalizes to other physical devices and contexts. Our results show that HAT is a strong teleoperation interface across key metrics including efficiency, errors, learning curve, and workload. Code and videos are located on our project website.
RCareWorld: A Human-centric Simulation World for Caregiving Robots
Oct 19, 2022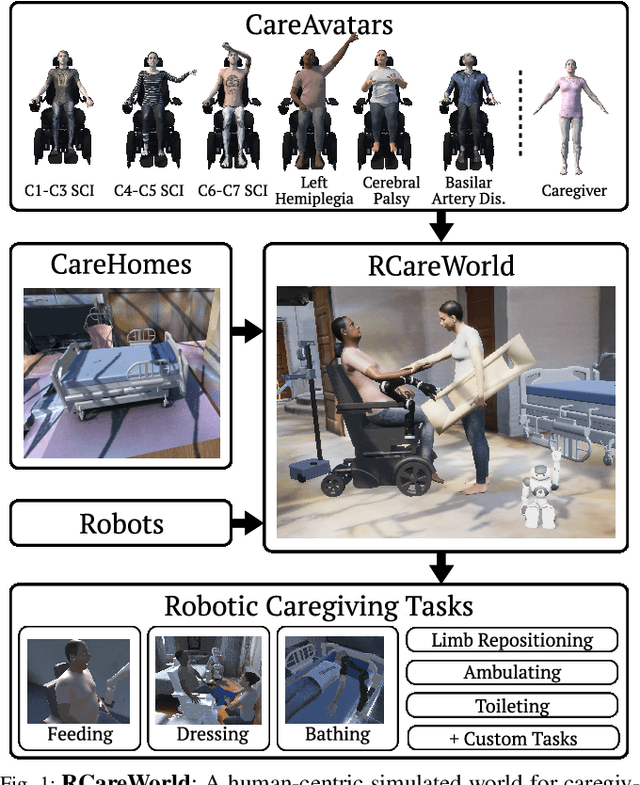
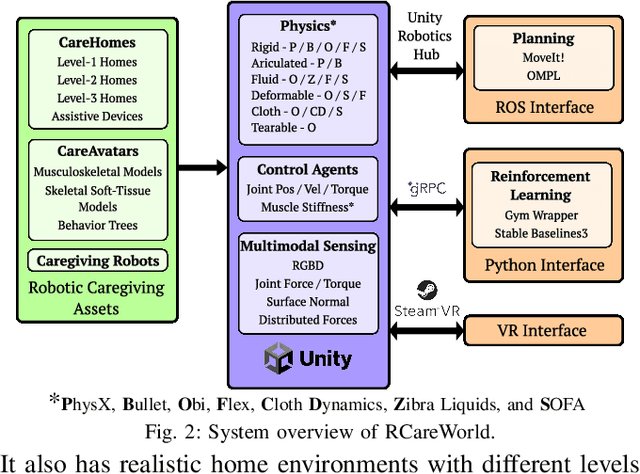
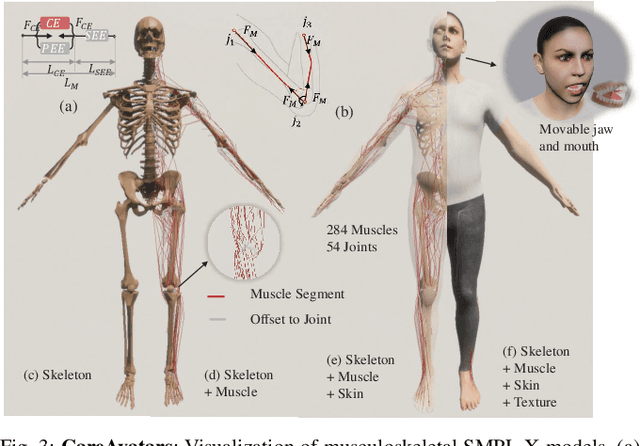
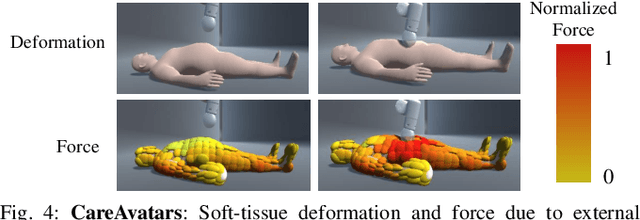
We present RCareWorld, a human-centric simulation world for physical and social robotic caregiving designed with inputs from stakeholders, including care recipients, caregivers, occupational therapists, and roboticists. RCareWorld has realistic human models of care recipients with mobility limitations and caregivers, home environments with multiple levels of accessibility and assistive devices, and robots commonly used for caregiving. It interfaces with various physics engines to model diverse material types necessary for simulating caregiving scenarios, and provides the capability to plan, control, and learn both human and robot control policies by integrating with state-of-the-art external planning and learning libraries, and VR devices. We propose a set of realistic caregiving tasks in RCareWorld as a benchmark for physical robotic caregiving and provide baseline control policies for them. We illustrate the high-fidelity simulation capabilities of RCareWorld by demonstrating the execution of a policy learnt in simulation for one of these tasks on a real-world setup. Additionally, we perform a real-world social robotic caregiving experiment using behaviors modeled in RCareWorld. Robotic caregiving, though potentially impactful towards enhancing the quality of life of care recipients and caregivers, is a field with many barriers to entry due to its interdisciplinary facets. RCareWorld takes the first step towards building a realistic simulation world for robotic caregiving that would enable researchers worldwide to contribute to this impactful field. Demo videos and supplementary materials can be found at: https://emprise.cs.cornell.edu/rcareworld/.
Two-Step Color-Polarization Demosaicking Network
Sep 13, 2022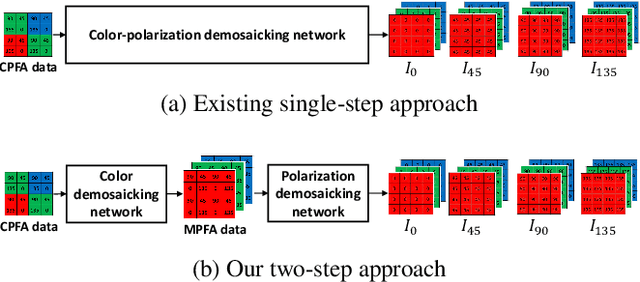
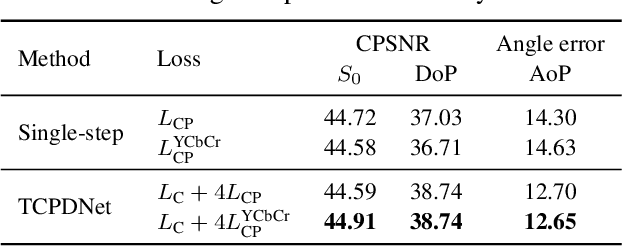
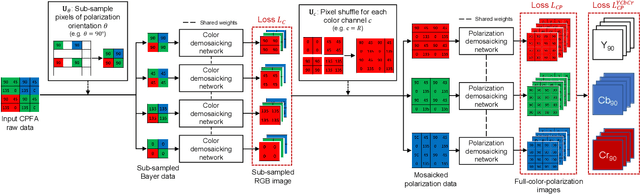
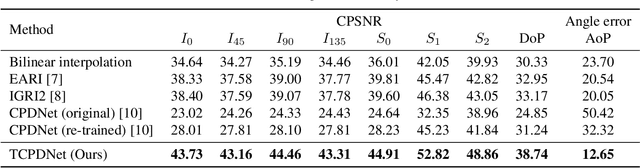
Polarization information of light in a scene is valuable for various image processing and computer vision tasks. A division-of-focal-plane polarimeter is a promising approach to capture the polarization images of different orientations in one shot, while it requires color-polarization demosaicking. In this paper, we propose a two-step color-polarization demosaicking network~(TCPDNet), which consists of two sub-tasks of color demosaicking and polarization demosaicking. We also introduce a reconstruction loss in the YCbCr color space to improve the performance of TCPDNet. Experimental comparisons demonstrate that TCPDNet outperforms existing methods in terms of the image quality of polarization images and the accuracy of Stokes parameters.