 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBimanual High-Density EMG Control for In-Home Mobile Manipulation by a User with Quadriplegia
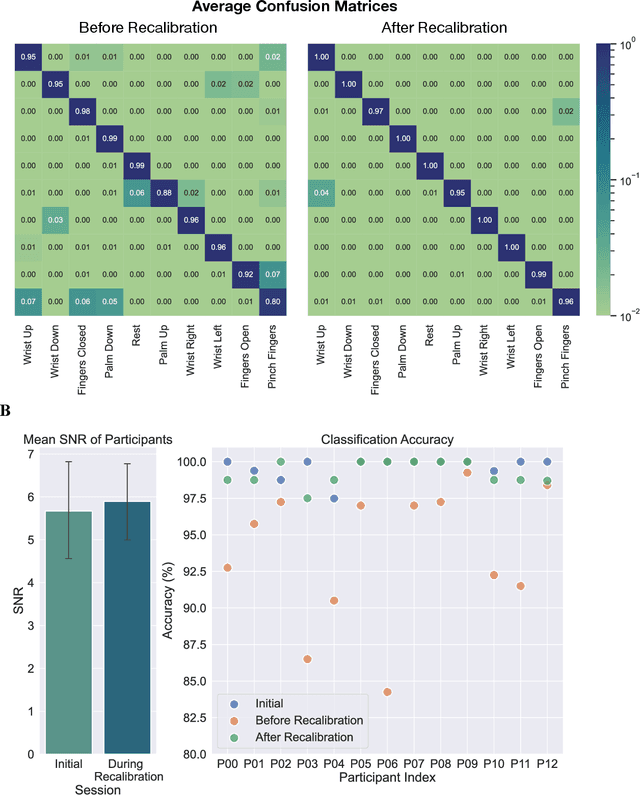
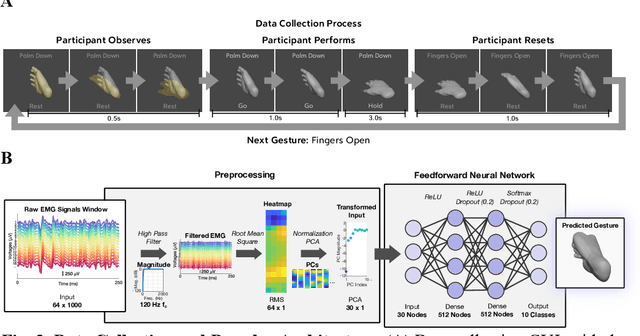
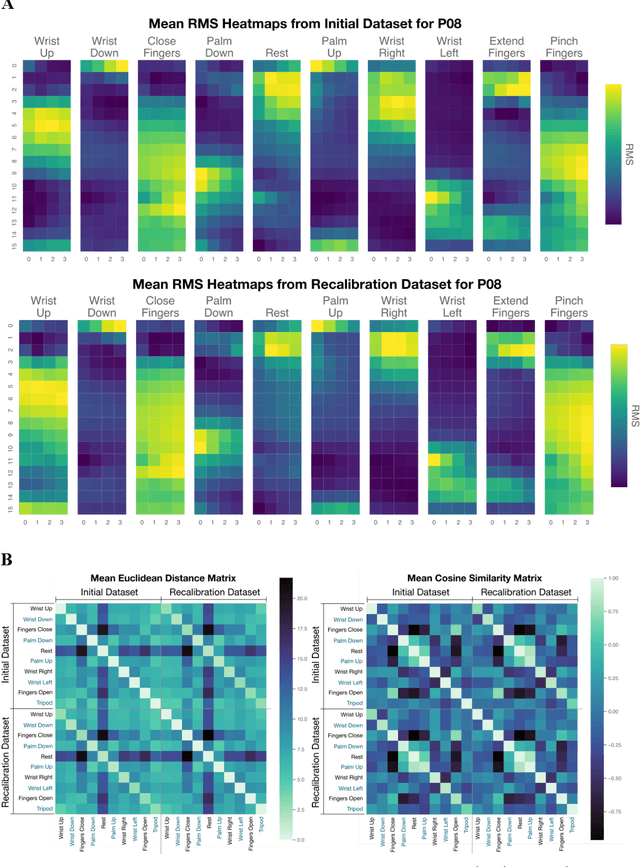
Feb 02, 2026Mobile manipulators in the home can enable people with cervical spinal cord injury (cSCI) to perform daily physical household tasks that they could not otherwise do themselves. However, paralysis in these users often limits access to traditional robot control interfaces such as joysticks or keyboards. In this work, we introduce and deploy the first system that enables a user with quadriplegia to control a mobile manipulator in their own home using bimanual high-density electromyography (HDEMG). We develop a pair of custom, fabric-integrated HDEMG forearm sleeves, worn on both arms, that capture residual neuromotor activity from clinically paralyzed degrees of freedom and support real-time gesture-based robot control. Second, by integrating vision, language, and motion planning modules, we introduce a shared autonomy framework that supports robust and user-driven teleoperation, with particular benefits for navigation-intensive tasks in home environments. Finally, to demonstrate the system in the wild, we present a twelve-day in-home user study evaluating real-time use of the wearable EMG interface for daily robot control. Together, these system components enable effective robot control for performing activities of daily living and other household tasks in a real home environment.
LAMS: LLM-Driven Automatic Mode Switching for Assistive Teleoperation
Jan 15, 2025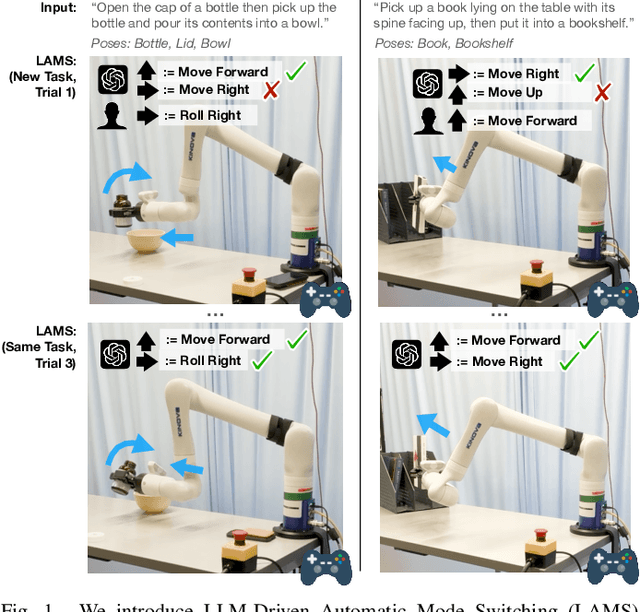
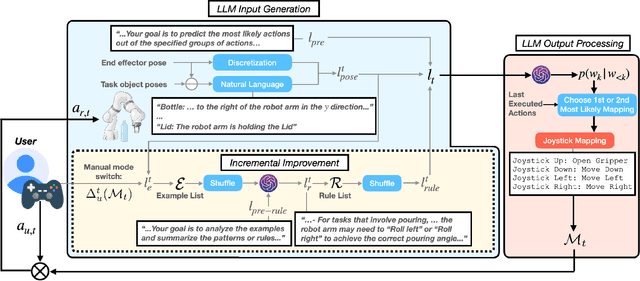
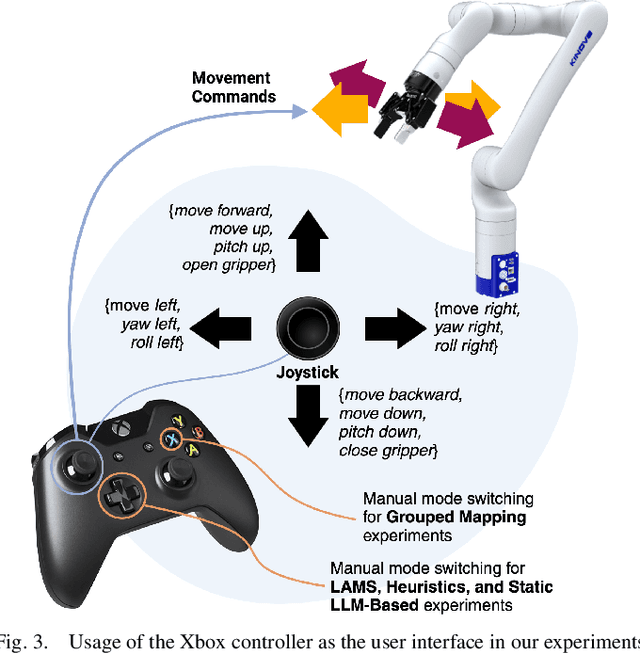
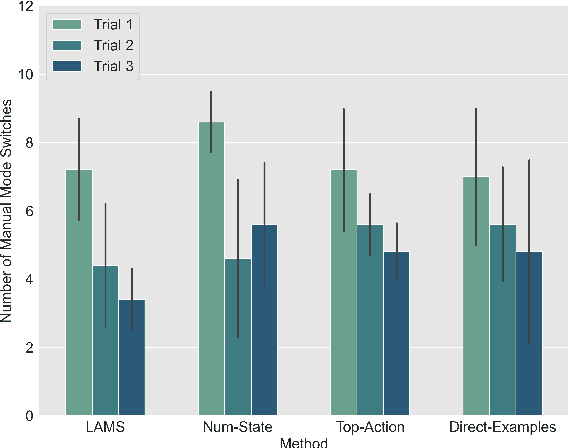
Teleoperating high degrees-of-freedom (DoF) robotic manipulators via low-DoF controllers like joysticks often requires frequent switching between control modes, where each mode maps controller movements to specific robot actions. Manually performing this frequent switching can make teleoperation cumbersome and inefficient. On the other hand, existing automatic mode-switching solutions, such as heuristic-based or learning-based methods, are often task-specific and lack generalizability. In this paper, we introduce LLM-Driven Automatic Mode Switching (LAMS), a novel approach that leverages Large Language Models (LLMs) to automatically switch control modes based on task context. Unlike existing methods, LAMS requires no prior task demonstrations and incrementally improves by integrating user-generated mode-switching examples. We validate LAMS through an ablation study and a user study with 10 participants on complex, long-horizon tasks, demonstrating that LAMS effectively reduces manual mode switches, is preferred over alternative methods, and improves performance over time. The project website with supplementary materials is at https://lams-assistance.github.io/.
EMGBench: Benchmarking Out-of-Distribution Generalization and Adaptation for Electromyography
Oct 31, 2024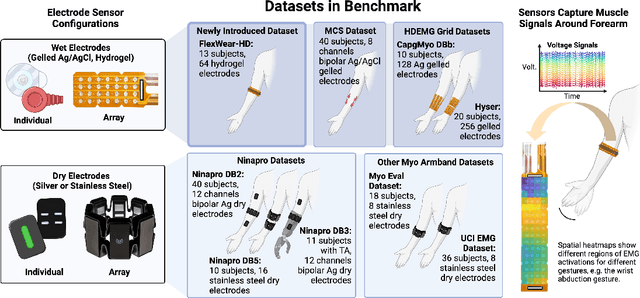
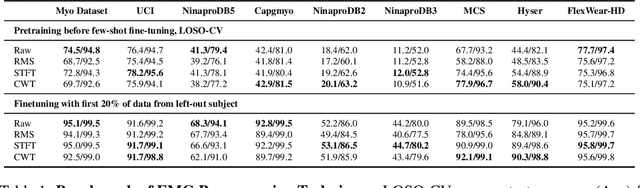
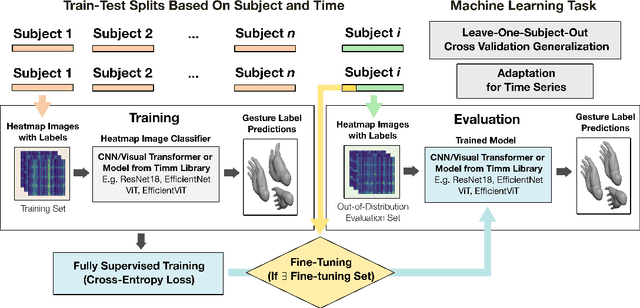
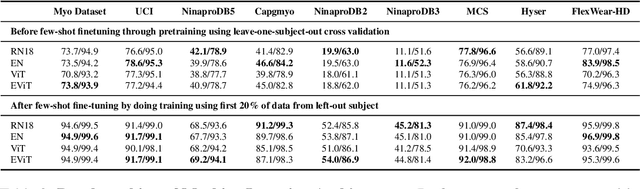
This paper introduces the first generalization and adaptation benchmark using machine learning for evaluating out-of-distribution performance of electromyography (EMG) classification algorithms. The ability of an EMG classifier to handle inputs drawn from a different distribution than the training distribution is critical for real-world deployment as a control interface. By predicting the user's intended gesture using EMG signals, we can create a wearable solution to control assistive technologies, such as computers, prosthetics, and mobile manipulator robots. This new out-of-distribution benchmark consists of two major tasks that have utility for building robust and adaptable control interfaces: 1) intersubject classification and 2) adaptation using train-test splits for time-series. This benchmark spans nine datasets--the largest collection of EMG datasets in a benchmark. Among these, a new dataset is introduced, featuring a novel, easy-to-wear high-density EMG wearable for data collection. The lack of open-source benchmarks has made comparing accuracy results between papers challenging for the EMG research community. This new benchmark provides researchers with a valuable resource for analyzing practical measures of out-of-distribution performance for EMG datasets. Our code and data from our new dataset can be found at emgbench.github.io.
Independence in the Home: A Wearable Interface for a Person with Quadriplegia to Teleoperate a Mobile Manipulator
Jan 02, 2024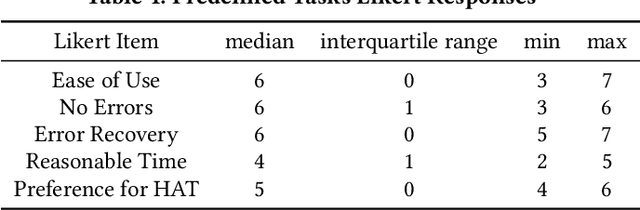
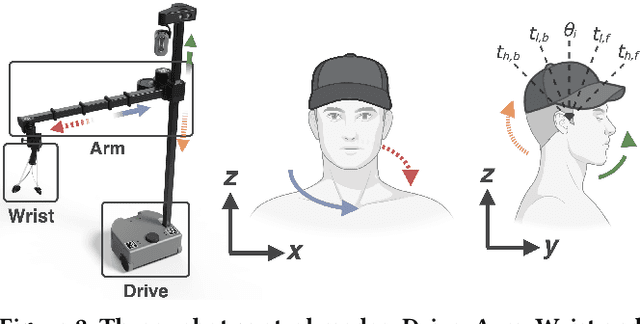
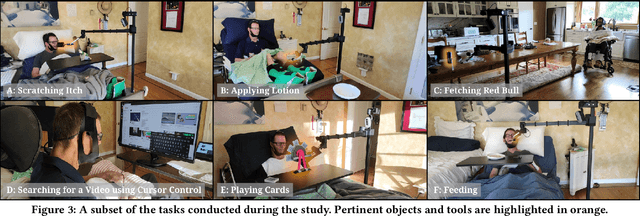
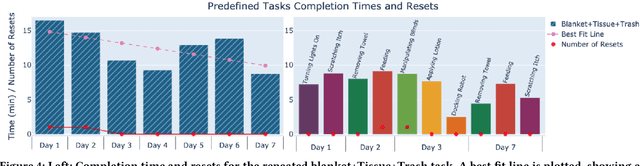
Teleoperation of mobile manipulators within a home environment can significantly enhance the independence of individuals with severe motor impairments, allowing them to regain the ability to perform self-care and household tasks. There is a critical need for novel teleoperation interfaces to offer effective alternatives for individuals with impairments who may encounter challenges in using existing interfaces due to physical limitations. In this work, we iterate on one such interface, HAT (Head-Worn Assistive Teleoperation), an inertial-based wearable integrated into any head-worn garment. We evaluate HAT through a 7-day in-home study with Henry Evans, a non-speaking individual with quadriplegia who has participated extensively in assistive robotics studies. We additionally evaluate HAT with a proposed shared control method for mobile manipulators termed Driver Assistance and demonstrate how the interface generalizes to other physical devices and contexts. Our results show that HAT is a strong teleoperation interface across key metrics including efficiency, errors, learning curve, and workload. Code and videos are located on our project website.
High-density Electromyography for Effective Gesture-based Control of Physically Assistive Mobile Manipulators
Dec 12, 2023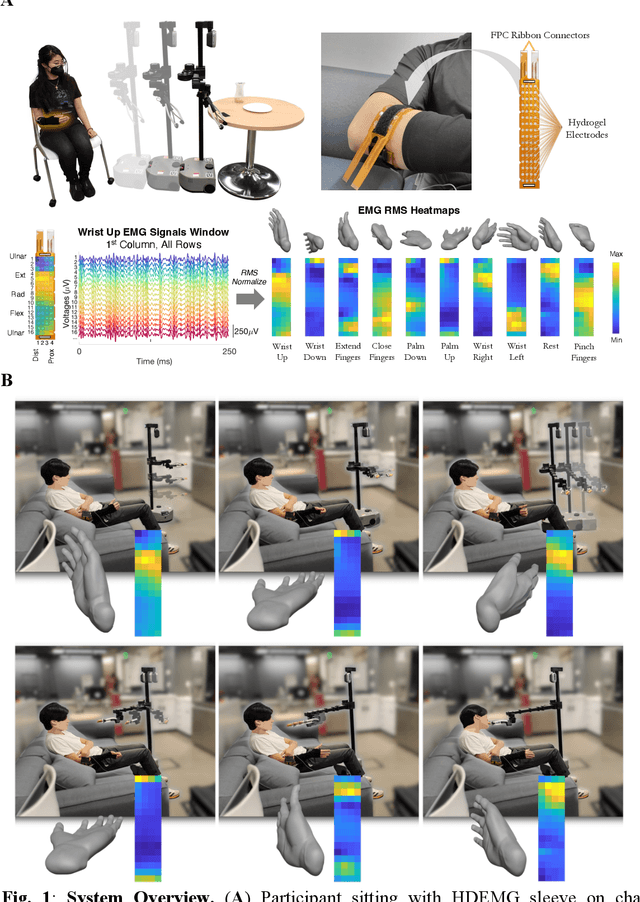
Injury to the cervical spinal cord can cause quadriplegia, impairing muscle function in all four limbs. People with impaired hand function and mobility encounter significant difficulties in carrying out essential self-care and household tasks. Despite the impairment of their neural drive, their volitional myoelectric activity is often partially preserved. High-density electromyography (HDEMG) can detect this myoelectric activity, which can serve as control inputs to assistive devices. Previous HDEMG-controlled robotic interfaces have primarily been limited to controlling table-mounted robot arms. These have constrained reach capabilities. Instead, the ability to control mobile manipulators, which have no such workspace constraints, could allow individuals with quadriplegia to perform a greater variety of assistive tasks, thus restoring independence and reducing caregiver workload. In this study, we introduce a non-invasive wearable HDEMG interface with real-time myoelectric hand gesture recognition, enabling both coarse and fine control over the intricate mobility and manipulation functionalities of an 8 degree-of-freedom mobile manipulator. Our evaluation, involving 13 participants engaging in challenging self-care and household activities, demonstrates the potential of our wearable HDEMG system to profoundly enhance user independence by enabling non-invasive control of a mobile manipulator.