 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigh-density Electromyography for Effective Gesture-based Control of Physically Assistive Mobile Manipulators
Paper and Code
Dec 12, 2023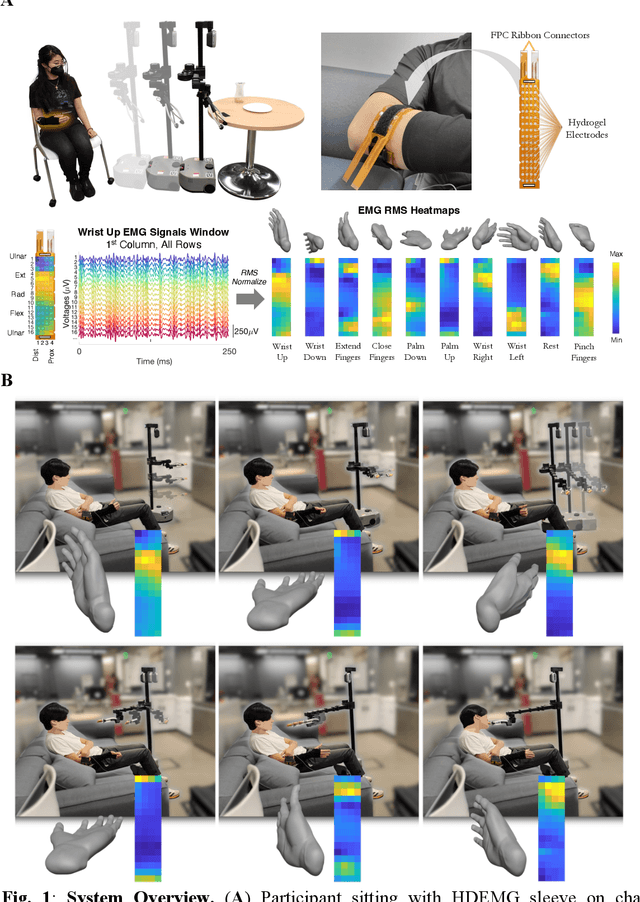
Injury to the cervical spinal cord can cause quadriplegia, impairing muscle function in all four limbs. People with impaired hand function and mobility encounter significant difficulties in carrying out essential self-care and household tasks. Despite the impairment of their neural drive, their volitional myoelectric activity is often partially preserved. High-density electromyography (HDEMG) can detect this myoelectric activity, which can serve as control inputs to assistive devices. Previous HDEMG-controlled robotic interfaces have primarily been limited to controlling table-mounted robot arms. These have constrained reach capabilities. Instead, the ability to control mobile manipulators, which have no such workspace constraints, could allow individuals with quadriplegia to perform a greater variety of assistive tasks, thus restoring independence and reducing caregiver workload. In this study, we introduce a non-invasive wearable HDEMG interface with real-time myoelectric hand gesture recognition, enabling both coarse and fine control over the intricate mobility and manipulation functionalities of an 8 degree-of-freedom mobile manipulator. Our evaluation, involving 13 participants engaging in challenging self-care and household activities, demonstrates the potential of our wearable HDEMG system to profoundly enhance user independence by enabling non-invasive control of a mobile manipulator.