 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTAACKIT: Track Annotation and Analytics with Continuous Knowledge Integration Tool
Dec 18, 2024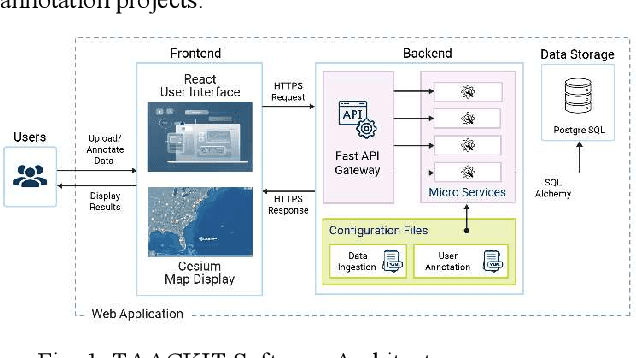
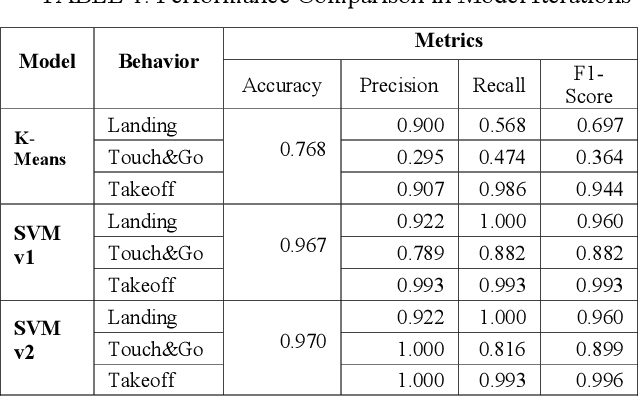
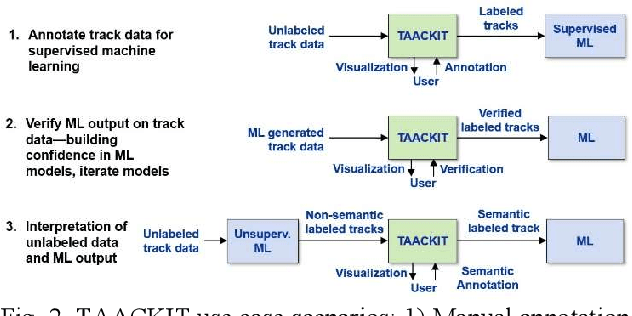
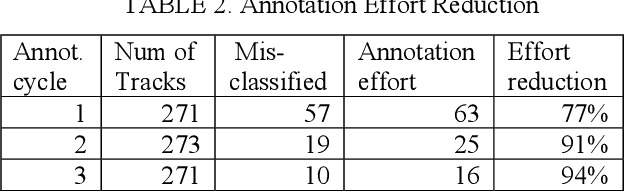
Machine learning (ML) is a powerful tool for efficiently analyzing data, detecting patterns, and forecasting trends across various domains such as text, audio, and images. The availability of annotation tools to generate reliably annotated data is crucial for advances in ML applications. In the domain of geospatial tracks, the lack of such tools to annotate and validate data impedes rapid and accessible ML application development. This paper presents Track Annotation and Analytics with Continuous Knowledge Integration Tool (TAACKIT) to serve the critically important functions of annotating geospatial track data and validating ML models. We demonstrate an ML application use case in the air traffic domain to illustrate its data annotation and model evaluation power and quantify the annotation effort reduction.
An Adaptable, Safe, and Portable Robot-Assisted Feeding System
Mar 07, 2024


We demonstrate a robot-assisted feeding system that enables people with mobility impairments to feed themselves. Our system design embodies Safety, Portability, and User Control, with comprehensive full-stack safety checks, the ability to be mounted on and powered by any powered wheelchair, and a custom web-app allowing care-recipients to leverage their own assistive devices for robot control. For bite acquisition, we leverage multi-modal online learning to tractably adapt to unseen food types. For bite transfer, we leverage real-time mouth perception and interaction-aware control. Co-designed with community researchers, our system has been validated through multiple end-user studies.
Feel the Bite: Robot-Assisted Inside-Mouth Bite Transfer using Robust Mouth Perception and Physical Interaction-Aware Control
Mar 06, 2024Robot-assisted feeding can greatly enhance the lives of those with mobility limitations. Modern feeding systems can pick up and position food in front of a care recipient's mouth for a bite. However, many with severe mobility constraints cannot lean forward and need direct inside-mouth food placement. This demands precision, especially for those with restricted mouth openings, and appropriately reacting to various physical interactions - incidental contacts as the utensil moves inside, impulsive contacts due to sudden muscle spasms, deliberate tongue maneuvers by the person being fed to guide the utensil, and intentional bites. In this paper, we propose an inside-mouth bite transfer system that addresses these challenges with two key components: a multi-view mouth perception pipeline robust to tool occlusion, and a control mechanism that employs multimodal time-series classification to discern and react to different physical interactions. We demonstrate the efficacy of these individual components through two ablation studies. In a full system evaluation, our system successfully fed 13 care recipients with diverse mobility challenges. Participants consistently emphasized the comfort and safety of our inside-mouth bite transfer system, and gave it high technology acceptance ratings - underscoring its transformative potential in real-world scenarios. Supplementary materials and videos can be found at http://emprise.cs.cornell.edu/bitetransfer/ .