 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTAACKIT: Track Annotation and Analytics with Continuous Knowledge Integration Tool
Dec 18, 2024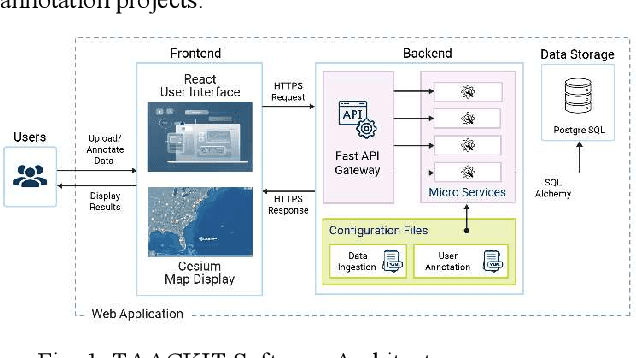
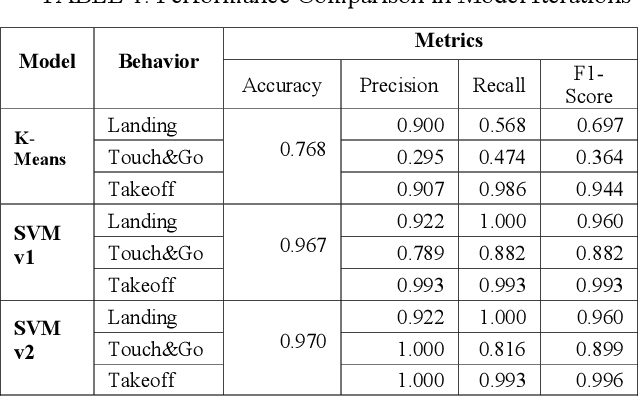
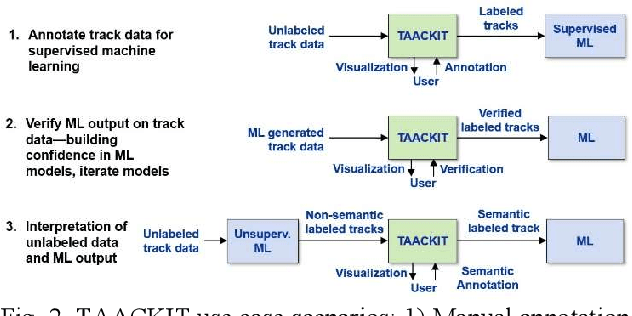
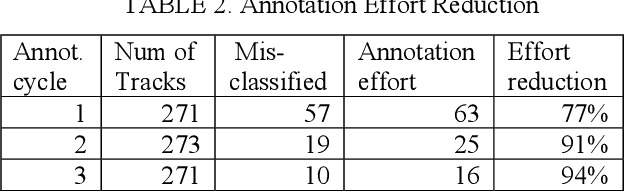
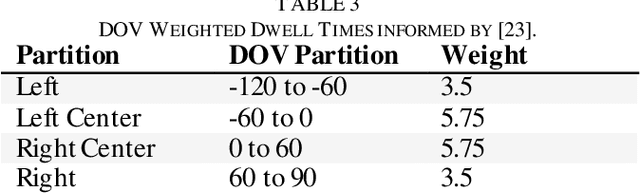
Machine learning (ML) is a powerful tool for efficiently analyzing data, detecting patterns, and forecasting trends across various domains such as text, audio, and images. The availability of annotation tools to generate reliably annotated data is crucial for advances in ML applications. In the domain of geospatial tracks, the lack of such tools to annotate and validate data impedes rapid and accessible ML application development. This paper presents Track Annotation and Analytics with Continuous Knowledge Integration Tool (TAACKIT) to serve the critically important functions of annotating geospatial track data and validating ML models. We demonstrate an ML application use case in the air traffic domain to illustrate its data annotation and model evaluation power and quantify the annotation effort reduction.
Estimating See and Be Seen Performance with an Airborne Visual Acquisition Model
Jun 29, 2023


Separation provision and collision avoidance to avoid other air traffic are fundamental components of the layered conflict management system to ensure safe and efficient operations. Pilots have visual-based separation responsibilities to see and be seen to maintain separation between aircraft. To safely integrate into the airspace, drones should be required to have a minimum level of performance based on the safety achieved as baselined by crewed aircraft seen and be seen interactions. Drone interactions with crewed aircraft should not be more hazardous than interactions between traditional aviation aircraft. Accordingly, there is need for a methodology to design and evaluate detect and avoid systems, to be equipped by drones to mitigate the risk of a midair collision, where the methodology explicitly addresses, both semantically and mathematically, the appropriate operating rules associated with see and be seen. In response, we simulated how onboard pilots safely operate through see and be seen interactions using an updated visual acquisition model that was originally developed by J.W. Andrews decades ago. Monte Carlo simulations were representative two aircraft flying under visual flight rules and results were analyzed with respect to drone detect and avoid performance standards.
Applicability and Surrogacy of Uncorrelated Airspace Encounter Models at Low Altitudes
Mar 04, 2021


The National Airspace System (NAS) is a complex and evolving system that enables safe and efficient aviation. Advanced air mobility concepts and new airspace entrants, such as unmanned aircraft, must integrate into the NAS without degrading overall safety or efficiency. For instance, regulations, standards, and systems are required to mitigate the risk of a midair collision between aircraft. Monte Carlo simulations have been a foundational capability for decades to develop, assess, and certify aircraft conflict avoidance systems. These are often validated through human-in-the-loop experiments and flight testing. For many aviation safety studies, manned aircraft behavior is represented using dynamic Bayesian networks. The original statistical models were developed from 2008-2013 to support safety simulations for altitudes above 500 feet Above Ground Level (AGL). However, these models were not sufficient to assess the safety of smaller UAS operations below 500 feet AGL. In response, newer models with altitude floors below 500 feet AGL have been in development since 2018. Many of the models assume that aircraft behavior is uncorrelated and not dependent on air traffic services or nearby aircraft. Our research objective was to compare the various uncorrelated models of conventional aircraft and identify how the models differ. Particularly if models of rotorcraft were sufficiently different than models of fixed-wing aircraft to require type specific models. The primary contribution is guidance on which uncorrelated models to leverage when evaluating the performance of a collision avoidance system designed for low altitude operations. We also address which models can be surrogates for noncooperative aircraft without transponders.
Method to Characterize UAS Vehicle to Vehicle Encounters using Open Source Data by the UAS SARP
Oct 31, 2019


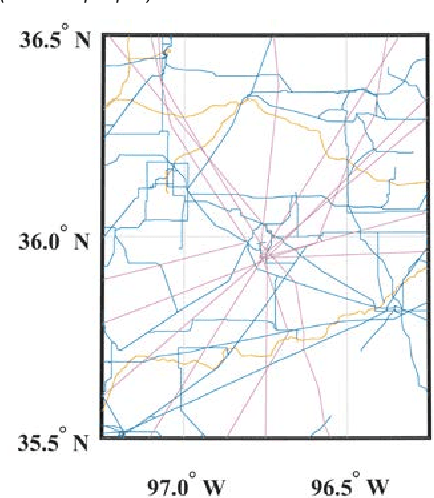
As UASs increasingly integrate in to the US national airspace system, there is increasing need to characterize how UAS may encounter each other. To maintain safety and mitigate the risk of collisions during these encounter, vehicle to vehicle (V2V) technologies may be required. To inform the development of V2V and other safety critical technologies, we demonstrate a methodology to analytically calculate all potential relative geometries between different UAS operations performing inspection missions along three different types of linear infrastructure. This method is based on a previously demonstrated technique that leverages open source geospatial information to generate representative unmanned aircraft trajectories. Using high performance computing resources, we performed trillions of calculations to estimate the relative distance and azimuth between long linear infrastructure inspection missions across sixteen locations.
Large Scale Organization and Inference of an Imagery Dataset for Public Safety
Aug 16, 2019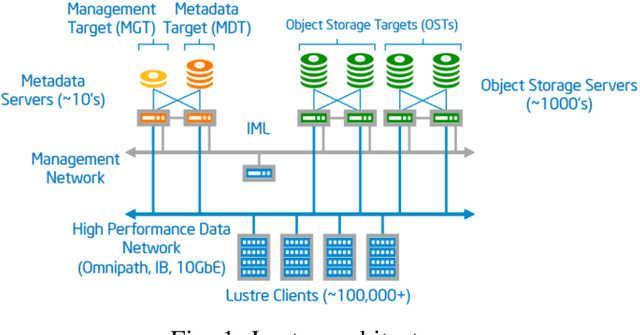

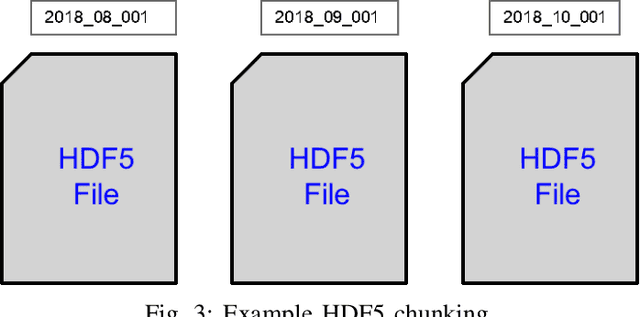
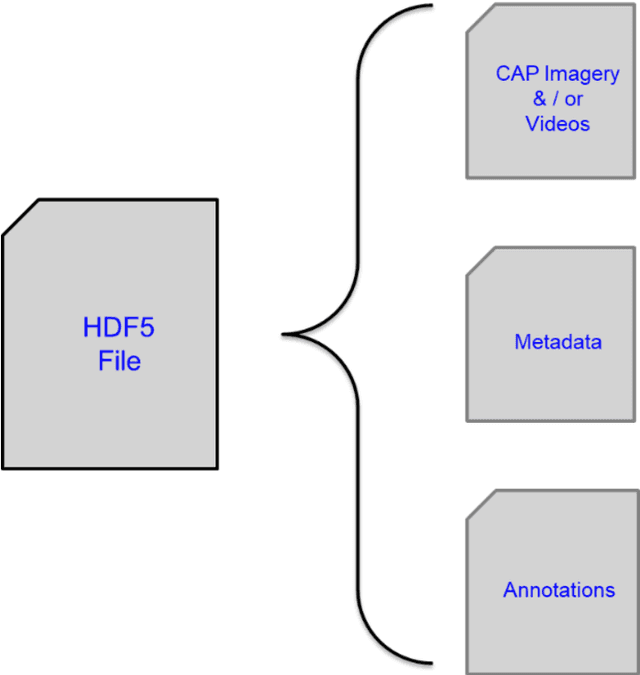
Video applications and analytics are routinely projected as a stressing and significant service of the Nationwide Public Safety Broadband Network. As part of a NIST PSCR funded effort, the New Jersey Office of Homeland Security and Preparedness and MIT Lincoln Laboratory have been developing a computer vision dataset of operational and representative public safety scenarios. The scale and scope of this dataset necessitates a hierarchical organization approach for efficient compute and storage. We overview architectural considerations using the Lincoln Laboratory Supercomputing Cluster as a test architecture. We then describe how we intelligently organized the dataset across LLSC and evaluated it with large scale imagery inference across terabytes of data.
Semantic Analysis of Traffic Camera Data: Topic Signal Extraction and Anomalous Event Detection
May 17, 2019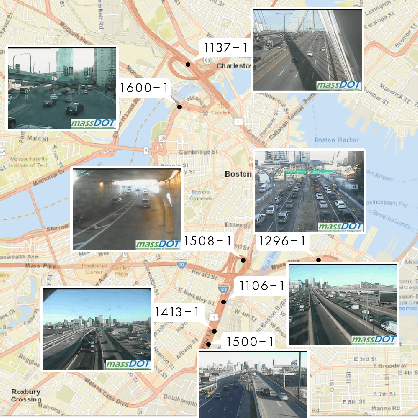
Traffic Management Centers (TMCs) routinely use traffic cameras to provide situational awareness regarding traffic, road, and weather conditions. Camera footage is quite useful for a variety of diagnostic purposes; yet, most footage is kept for only a few days, if at all. This is largely due to the fact that currently, identification of notable footage is done via manual review by human operators---a laborious and inefficient process. In this article, we propose a semantics-oriented approach to analyzing sequential image data, and demonstrate its application for automatic detection of real-world, anomalous events in weather and traffic conditions. Our approach constructs semantic vector representations of image contents from textual labels which can be easily obtained from off-the-shelf, pretrained image labeling software. These semantic label vectors are used to construct semantic topic signals---time series representations of physical processes---using the Latent Dirichlet Allocation (LDA) topic model. By detecting anomalies in the topic signals, we identify notable footage corresponding to winter storms and anomalous traffic congestion. In validation against real-world events, anomaly detection using semantic topic signals significantly outperforms detection using any individual label signal.
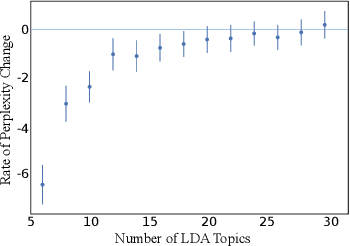
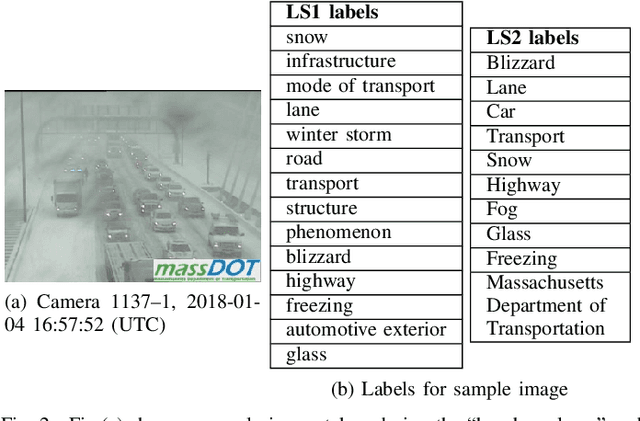
Semantic Topic Analysis of Traffic Camera Images
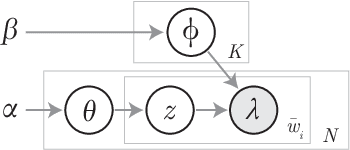
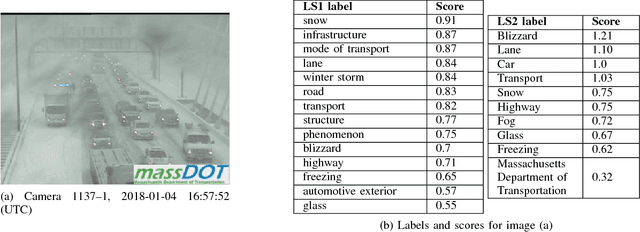
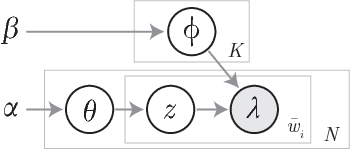
Sep 27, 2018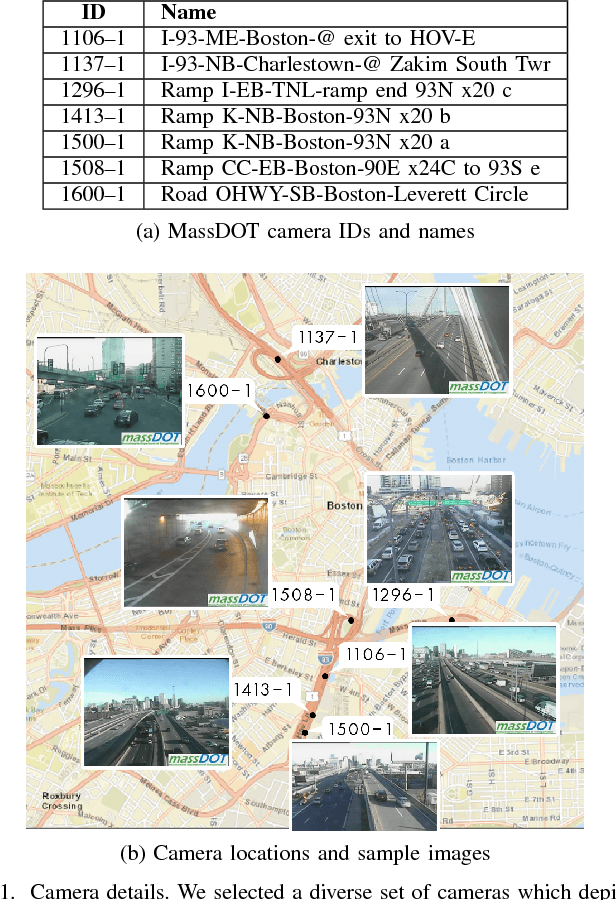
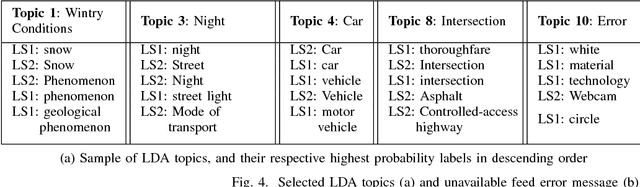
Traffic cameras are commonly deployed monitoring components in road infrastructure networks, providing operators visual information about conditions at critical points in the network. However, human observers are often limited in their ability to process simultaneous information sources. Recent advancements in computer vision, driven by deep learning methods, have enabled general object recognition, unlocking opportunities for camera-based sensing beyond the existing human observer paradigm. In this paper, we present a Natural Language Processing (NLP)-inspired approach, entitled Bag-of-Label-Words (BoLW), for analyzing image data sets using exclusively textual labels. The BoLW model represents the data in a conventional matrix form, enabling data compression and decomposition techniques, while preserving semantic interpretability. We apply the Latent Dirichlet Allocation (LDA) topic model to decompose the label data into a small number of semantic topics. To illustrate our approach, we use freeway camera images collected from the Boston area between December 2017-January 2018. We analyze the cameras' sensitivity to weather events; identify temporal traffic patterns; and analyze the impact of infrequent events, such as the winter holidays and the "bomb cyclone" winter storm. This study demonstrates the flexibility of our approach, which allows us to analyze weather events and freeway traffic using only traffic camera image labels.