 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTo Ask or Not To Ask: Human-in-the-loop Contextual Bandits with Applications in Robot-Assisted Feeding
May 11, 2024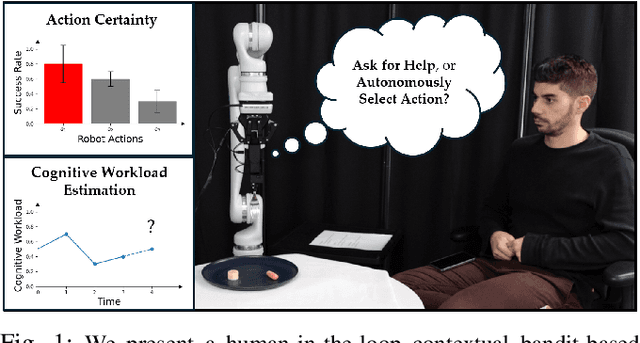
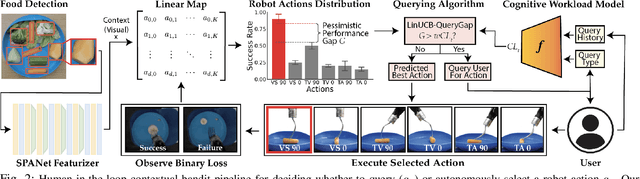
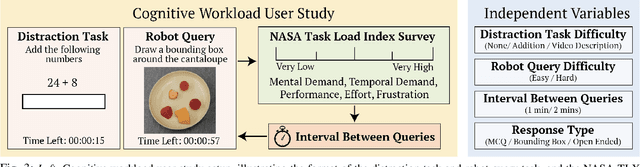
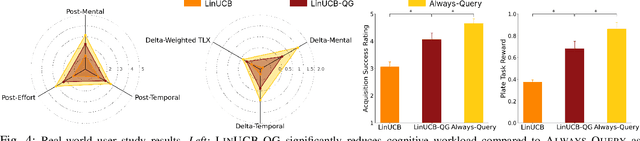
Robot-assisted bite acquisition involves picking up food items that vary in their shape, compliance, size, and texture. A fully autonomous strategy for bite acquisition is unlikely to efficiently generalize to this wide variety of food items. We propose to leverage the presence of the care recipient to provide feedback when the system encounters novel food items. However, repeatedly asking for help imposes cognitive workload on the user. In this work, we formulate human-in-the-loop bite acquisition within a contextual bandit framework and propose a novel method, LinUCB-QG, that selectively asks for help. This method leverages a predictive model of cognitive workload in response to different types and timings of queries, learned using data from 89 participants collected in an online user study. We demonstrate that this method enhances the balance between task performance and cognitive workload compared to autonomous and querying baselines, through experiments in a food dataset-based simulator and a user study with 18 participants without mobility limitations.
Multiple Ways of Working with Users to Develop Physically Assistive Robots
Mar 07, 2024
Despite the growth of physically assistive robotics (PAR) research over the last decade, nearly half of PAR user studies do not involve participants with the target disabilities. There are several reasons for this -- recruitment challenges, small sample sizes, and transportation logistics -- all influenced by systemic barriers that people with disabilities face. However, it is well-established that working with end-users results in technology that better addresses their needs and integrates with their lived circumstances. In this paper, we reflect on multiple approaches we have taken to working with people with motor impairments across the design, development, and evaluation of three PAR projects: (a) assistive feeding with a robot arm; (b) assistive teleoperation with a mobile manipulator; and (c) shared control with a robot arm. We discuss these approaches to working with users along three dimensions -- individual vs. community-level insight, logistic burden on end-users vs. researchers, and benefit to researchers vs. community -- and share recommendations for how other PAR researchers can incorporate users into their work.
An Adaptable, Safe, and Portable Robot-Assisted Feeding System
Mar 07, 2024


We demonstrate a robot-assisted feeding system that enables people with mobility impairments to feed themselves. Our system design embodies Safety, Portability, and User Control, with comprehensive full-stack safety checks, the ability to be mounted on and powered by any powered wheelchair, and a custom web-app allowing care-recipients to leverage their own assistive devices for robot control. For bite acquisition, we leverage multi-modal online learning to tractably adapt to unseen food types. For bite transfer, we leverage real-time mouth perception and interaction-aware control. Co-designed with community researchers, our system has been validated through multiple end-user studies.