 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSplat-MOVER: Multi-Stage, Open-Vocabulary Robotic Manipulation via Editable Gaussian Splatting
May 14, 2024



We present Splat-MOVER, a modular robotics stack for open-vocabulary robotic manipulation, which leverages the editability of Gaussian Splatting (GSplat) scene representations to enable multi-stage manipulation tasks. Splat-MOVER consists of: (i) ASK-Splat, a GSplat representation that distills latent codes for language semantics and grasp affordance into the 3D scene. ASK-Splat enables geometric, semantic, and affordance understanding of 3D scenes, which is critical for many robotics tasks; (ii) SEE-Splat, a real-time scene-editing module using 3D semantic masking and infilling to visualize the motions of objects that result from robot interactions in the real-world. SEE-Splat creates a "digital twin" of the evolving environment throughout the manipulation task; and (iii) Grasp-Splat, a grasp generation module that uses ASK-Splat and SEE-Splat to propose candidate grasps for open-world objects. ASK-Splat is trained in real-time from RGB images in a brief scanning phase prior to operation, while SEE-Splat and Grasp-Splat run in real-time during operation. We demonstrate the superior performance of Splat-MOVER in hardware experiments on a Kinova robot compared to two recent baselines in four single-stage, open-vocabulary manipulation tasks, as well as in four multi-stage manipulation tasks using the edited scene to reflect scene changes due to prior manipulation stages, which is not possible with the existing baselines. Code for this project and a link to the project page will be made available soon.
$\textbf{Splat-MOVER}$: Multi-Stage, Open-Vocabulary Robotic Manipulation via Editable Gaussian Splatting
May 07, 2024We present Splat-MOVER, a modular robotics stack for open-vocabulary robotic manipulation, which leverages the editability of Gaussian Splatting (GSplat) scene representations to enable multi-stage manipulation tasks. Splat-MOVER consists of: (i) $\textit{ASK-Splat}$, a GSplat representation that distills latent codes for language semantics and grasp affordance into the 3D scene. ASK-Splat enables geometric, semantic, and affordance understanding of 3D scenes, which is critical for many robotics tasks; (ii) $\textit{SEE-Splat}$, a real-time scene-editing module using 3D semantic masking and infilling to visualize the motions of objects that result from robot interactions in the real-world. SEE-Splat creates a "digital twin" of the evolving environment throughout the manipulation task; and (iii) $\textit{Grasp-Splat}$, a grasp generation module that uses ASK-Splat and SEE-Splat to propose candidate grasps for open-world objects. ASK-Splat is trained in real-time from RGB images in a brief scanning phase prior to operation, while SEE-Splat and Grasp-Splat run in real-time during operation. We demonstrate the superior performance of Splat-MOVER in hardware experiments on a Kinova robot compared to two recent baselines in four single-stage, open-vocabulary manipulation tasks, as well as in four multi-stage manipulation tasks using the edited scene to reflect scene changes due to prior manipulation stages, which is not possible with the existing baselines. Code for this project and a link to the project page will be made available soon.
Foundation Models in Robotics: Applications, Challenges, and the Future
Dec 13, 2023


We survey applications of pretrained foundation models in robotics. Traditional deep learning models in robotics are trained on small datasets tailored for specific tasks, which limits their adaptability across diverse applications. In contrast, foundation models pretrained on internet-scale data appear to have superior generalization capabilities, and in some instances display an emergent ability to find zero-shot solutions to problems that are not present in the training data. Foundation models may hold the potential to enhance various components of the robot autonomy stack, from perception to decision-making and control. For example, large language models can generate code or provide common sense reasoning, while vision-language models enable open-vocabulary visual recognition. However, significant open research challenges remain, particularly around the scarcity of robot-relevant training data, safety guarantees and uncertainty quantification, and real-time execution. In this survey, we study recent papers that have used or built foundation models to solve robotics problems. We explore how foundation models contribute to improving robot capabilities in the domains of perception, decision-making, and control. We discuss the challenges hindering the adoption of foundation models in robot autonomy and provide opportunities and potential pathways for future advancements. The GitHub project corresponding to this paper (Preliminary release. We are committed to further enhancing and updating this work to ensure its quality and relevance) can be found here: https://github.com/robotics-survey/Awesome-Robotics-Foundation-Models
Visual Learning-based Planning for Continuous High-Dimensional POMDPs
Dec 17, 2021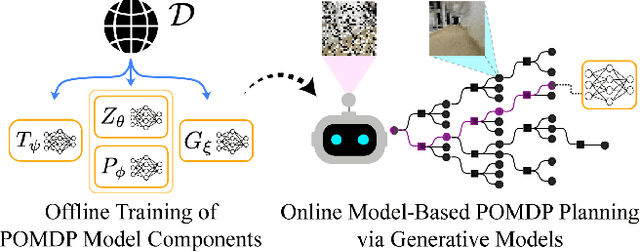
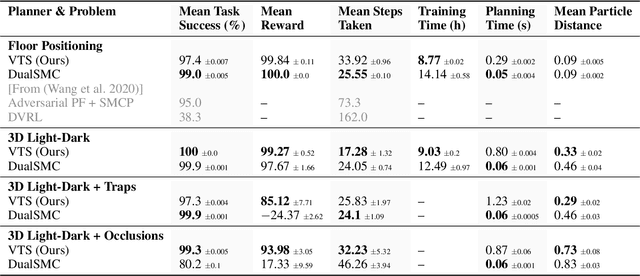
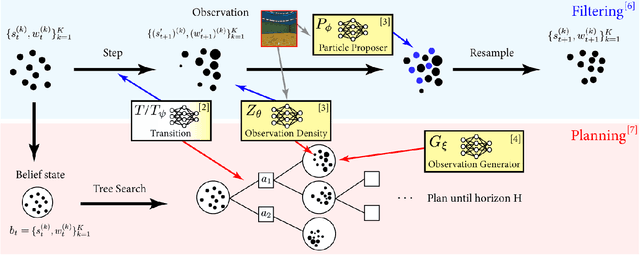
The Partially Observable Markov Decision Process (POMDP) is a powerful framework for capturing decision-making problems that involve state and transition uncertainty. However, most current POMDP planners cannot effectively handle very high-dimensional observations they often encounter in the real world (e.g. image observations in robotic domains). In this work, we propose Visual Tree Search (VTS), a learning and planning procedure that combines generative models learned offline with online model-based POMDP planning. VTS bridges offline model training and online planning by utilizing a set of deep generative observation models to predict and evaluate the likelihood of image observations in a Monte Carlo tree search planner. We show that VTS is robust to different observation noises and, since it utilizes online, model-based planning, can adapt to different reward structures without the need to re-train. This new approach outperforms a baseline state-of-the-art on-policy planning algorithm while using significantly less offline training time.