 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemantic-Metric Bayesian Risk Fields: Learning Robot Safety from Human Videos with a VLM Prior
Dec 09, 2025Humans interpret safety not as a binary signal but as a continuous, context- and spatially-dependent notion of risk. While risk is subjective, humans form rational mental models that guide action selection in dynamic environments. This work proposes a framework for extracting implicit human risk models by introducing a novel, semantically-conditioned and spatially-varying parametrization of risk, supervised directly from safe human demonstration videos and VLM common sense. Notably, we define risk through a Bayesian formulation. The prior is furnished by a pretrained vision-language model. In order to encourage the risk estimate to be more human aligned, a likelihood function modulates the prior to produce a relative metric of risk. Specifically, the likelihood is a learned ViT that maps pretrained features, to pixel-aligned risk values. Our pipeline ingests RGB images and a query object string, producing pixel-dense risk images. These images that can then be used as value-predictors in robot planning tasks or be projected into 3D for use in conventional trajectory optimization to produce human-like motion. This learned mapping enables generalization to novel objects and contexts, and has the potential to scale to much larger training datasets. In particular, the Bayesian framework that is introduced enables fast adaptation of our model to additional observations or common sense rules. We demonstrate that our proposed framework produces contextual risk that aligns with human preferences. Additionally, we illustrate several downstream applications of the model; as a value learner for visuomotor planners or in conjunction with a classical trajectory optimization algorithm. Our results suggest that our framework is a significant step toward enabling autonomous systems to internalize human-like risk. Code and results can be found at https://riskbayesian.github.io/bayesian_risk/.
DexFruit: Dexterous Manipulation and Gaussian Splatting Inspection of Fruit
Aug 09, 2025DexFruit is a robotic manipulation framework that enables gentle, autonomous handling of fragile fruit and precise evaluation of damage. Many fruits are fragile and prone to bruising, thus requiring humans to manually harvest them with care. In this work, we demonstrate by using optical tactile sensing, autonomous manipulation of fruit with minimal damage can be achieved. We show that our tactile informed diffusion policies outperform baselines in both reduced bruising and pick-and-place success rate across three fruits: strawberries, tomatoes, and blackberries. In addition, we introduce FruitSplat, a novel technique to represent and quantify visual damage in high-resolution 3D representation via 3D Gaussian Splatting (3DGS). Existing metrics for measuring damage lack quantitative rigor or require expensive equipment. With FruitSplat, we distill a 2D strawberry mask as well as a 2D bruise segmentation mask into the 3DGS representation. Furthermore, this representation is modular and general, compatible with any relevant 2D model. Overall, we demonstrate a 92% grasping policy success rate, up to a 20% reduction in visual bruising, and up to an 31% improvement in grasp success rate on challenging fruit compared to our baselines across our three tested fruits. We rigorously evaluate this result with over 630 trials. Please checkout our website at https://dex-fruit.github.io .
TensorTouch: Calibration of Tactile Sensors for High Resolution Stress Tensor and Deformation for Dexterous Manipulation
Jun 09, 2025Advanced dexterous manipulation involving multiple simultaneous contacts across different surfaces, like pinching coins from ground or manipulating intertwined objects, remains challenging for robotic systems. Such tasks exceed the capabilities of vision and proprioception alone, requiring high-resolution tactile sensing with calibrated physical metrics. Raw optical tactile sensor images, while information-rich, lack interpretability and cross-sensor transferability, limiting their real-world utility. TensorTouch addresses this challenge by integrating finite element analysis with deep learning to extract comprehensive contact information from optical tactile sensors, including stress tensors, deformation fields, and force distributions at pixel-level resolution. The TensorTouch framework achieves sub-millimeter position accuracy and precise force estimation while supporting large sensor deformations crucial for manipulating soft objects. Experimental validation demonstrates 90% success in selectively grasping one of two strings based on detected motion, enabling new contact-rich manipulation capabilities previously inaccessible to robotic systems.
Next Best Sense: Guiding Vision and Touch with FisherRF for 3D Gaussian Splatting
Oct 07, 2024



We propose a framework for active next best view and touch selection for robotic manipulators using 3D Gaussian Splatting (3DGS). 3DGS is emerging as a useful explicit 3D scene representation for robotics, as it has the ability to represent scenes in a both photorealistic and geometrically accurate manner. However, in real-world, online robotic scenes where the number of views is limited given efficiency requirements, random view selection for 3DGS becomes impractical as views are often overlapping and redundant. We address this issue by proposing an end-to-end online training and active view selection pipeline, which enhances the performance of 3DGS in few-view robotics settings. We first elevate the performance of few-shot 3DGS with a novel semantic depth alignment method using Segment Anything Model 2 (SAM2) that we supplement with Pearson depth and surface normal loss to improve color and depth reconstruction of real-world scenes. We then extend FisherRF, a next-best-view selection method for 3DGS, to select views and touch poses based on depth uncertainty. We perform online view selection on a real robot system during live 3DGS training. We motivate our improvements to few-shot GS scenes, and extend depth-based FisherRF to them, where we demonstrate both qualitative and quantitative improvements on challenging robot scenes. For more information, please see our project page at https://armlabstanford.github.io/next-best-sense.
SAFER-Splat: A Control Barrier Function for Safe Navigation with Online Gaussian Splatting Maps
Sep 15, 2024SAFER-Splat (Simultaneous Action Filtering and Environment Reconstruction) is a real-time, scalable, and minimally invasive action filter, based on control barrier functions, for safe robotic navigation in a detailed map constructed at runtime using Gaussian Splatting (GSplat). We propose a novel Control Barrier Function (CBF) that not only induces safety with respect to all Gaussian primitives in the scene, but when synthesized into a controller, is capable of processing hundreds of thousands of Gaussians while maintaining a minimal memory footprint and operating at 15 Hz during online Splat training. Of the total compute time, a small fraction of it consumes GPU resources, enabling uninterrupted training. The safety layer is minimally invasive, correcting robot actions only when they are unsafe. To showcase the safety filter, we also introduce SplatBridge, an open-source software package built with ROS for real-time GSplat mapping for robots. We demonstrate the safety and robustness of our pipeline first in simulation, where our method is 20-50x faster, safer, and less conservative than competing methods based on neural radiance fields. Further, we demonstrate simultaneous GSplat mapping and safety filtering on a drone hardware platform using only on-board perception. We verify that under teleoperation a human pilot cannot invoke a collision. Our videos and codebase can be found at https://chengine.github.io/safer-splat.
Splat-MOVER: Multi-Stage, Open-Vocabulary Robotic Manipulation via Editable Gaussian Splatting
May 14, 2024



We present Splat-MOVER, a modular robotics stack for open-vocabulary robotic manipulation, which leverages the editability of Gaussian Splatting (GSplat) scene representations to enable multi-stage manipulation tasks. Splat-MOVER consists of: (i) ASK-Splat, a GSplat representation that distills latent codes for language semantics and grasp affordance into the 3D scene. ASK-Splat enables geometric, semantic, and affordance understanding of 3D scenes, which is critical for many robotics tasks; (ii) SEE-Splat, a real-time scene-editing module using 3D semantic masking and infilling to visualize the motions of objects that result from robot interactions in the real-world. SEE-Splat creates a "digital twin" of the evolving environment throughout the manipulation task; and (iii) Grasp-Splat, a grasp generation module that uses ASK-Splat and SEE-Splat to propose candidate grasps for open-world objects. ASK-Splat is trained in real-time from RGB images in a brief scanning phase prior to operation, while SEE-Splat and Grasp-Splat run in real-time during operation. We demonstrate the superior performance of Splat-MOVER in hardware experiments on a Kinova robot compared to two recent baselines in four single-stage, open-vocabulary manipulation tasks, as well as in four multi-stage manipulation tasks using the edited scene to reflect scene changes due to prior manipulation stages, which is not possible with the existing baselines. Code for this project and a link to the project page will be made available soon.
$\textbf{Splat-MOVER}$: Multi-Stage, Open-Vocabulary Robotic Manipulation via Editable Gaussian Splatting
May 07, 2024We present Splat-MOVER, a modular robotics stack for open-vocabulary robotic manipulation, which leverages the editability of Gaussian Splatting (GSplat) scene representations to enable multi-stage manipulation tasks. Splat-MOVER consists of: (i) $\textit{ASK-Splat}$, a GSplat representation that distills latent codes for language semantics and grasp affordance into the 3D scene. ASK-Splat enables geometric, semantic, and affordance understanding of 3D scenes, which is critical for many robotics tasks; (ii) $\textit{SEE-Splat}$, a real-time scene-editing module using 3D semantic masking and infilling to visualize the motions of objects that result from robot interactions in the real-world. SEE-Splat creates a "digital twin" of the evolving environment throughout the manipulation task; and (iii) $\textit{Grasp-Splat}$, a grasp generation module that uses ASK-Splat and SEE-Splat to propose candidate grasps for open-world objects. ASK-Splat is trained in real-time from RGB images in a brief scanning phase prior to operation, while SEE-Splat and Grasp-Splat run in real-time during operation. We demonstrate the superior performance of Splat-MOVER in hardware experiments on a Kinova robot compared to two recent baselines in four single-stage, open-vocabulary manipulation tasks, as well as in four multi-stage manipulation tasks using the edited scene to reflect scene changes due to prior manipulation stages, which is not possible with the existing baselines. Code for this project and a link to the project page will be made available soon.
Touch-GS: Visual-Tactile Supervised 3D Gaussian Splatting
Mar 18, 2024In this work, we propose a novel method to supervise 3D Gaussian Splatting (3DGS) scenes using optical tactile sensors. Optical tactile sensors have become widespread in their use in robotics for manipulation and object representation; however, raw optical tactile sensor data is unsuitable to directly supervise a 3DGS scene. Our representation leverages a Gaussian Process Implicit Surface to implicitly represent the object, combining many touches into a unified representation with uncertainty. We merge this model with a monocular depth estimation network, which is aligned in a two stage process, coarsely aligning with a depth camera and then finely adjusting to match our touch data. For every training image, our method produces a corresponding fused depth and uncertainty map. Utilizing this additional information, we propose a new loss function, variance weighted depth supervised loss, for training the 3DGS scene model. We leverage the DenseTact optical tactile sensor and RealSense RGB-D camera to show that combining touch and vision in this manner leads to quantitatively and qualitatively better results than vision or touch alone in a few-view scene syntheses on opaque as well as on reflective and transparent objects. Please see our project page at http://armlabstanford.github.io/touch-gs
Safe Drone Flight with Time-Varying Backup Controllers
Jul 11, 2022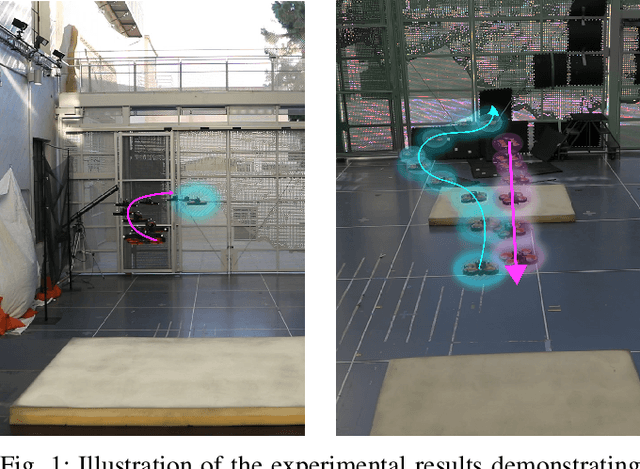
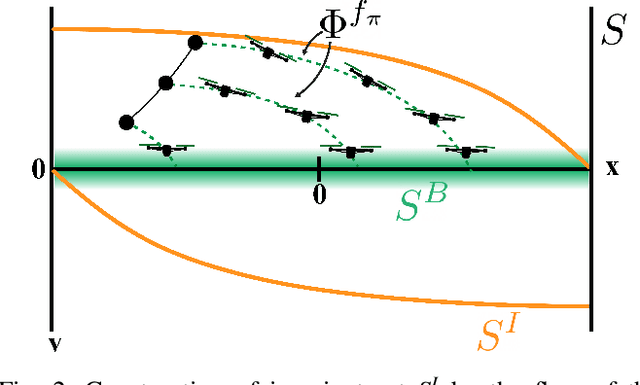
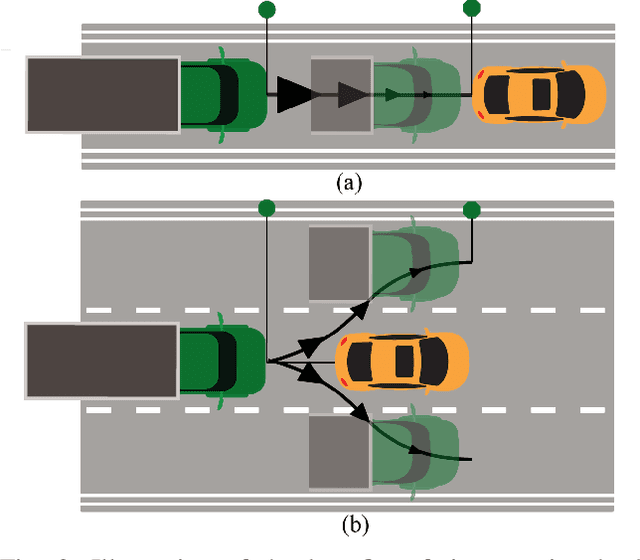
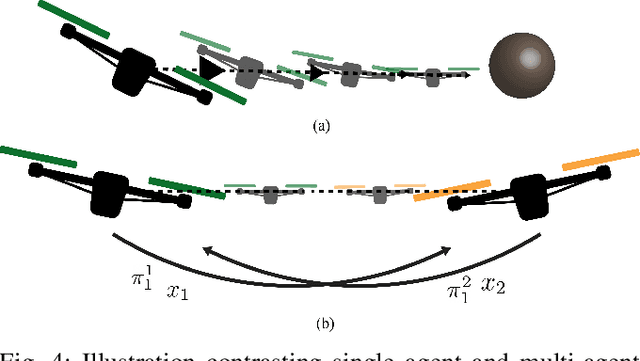
The weight, space, and power limitations of small aerial vehicles often prevent the application of modern control techniques without significant model simplifications. Moreover, high-speed agile behavior, such as that exhibited in drone racing, make these simplified models too unreliable for safety-critical control. In this work, we introduce the concept of time-varying backup controllers (TBCs): user-specified maneuvers combined with backup controllers that generate reference trajectories which guarantee the safety of nonlinear systems. TBCs reduce conservatism when compared to traditional backup controllers and can be directly applied to multi-agent coordination to guarantee safety. Theoretically, we provide conditions under which TBCs strictly reduce conservatism, describe how to switch between several TBC's and show how to embed TBCs in a multi-agent setting. Experimentally, we verify that TBCs safely increase operational freedom when filtering a pilot's actions and demonstrate robustness and computational efficiency when applied to decentralized safety filtering of two quadrotors.
Onboard Safety Guarantees for Racing Drones: High-speed Geofencing with Control Barrier Functions
Jan 12, 2022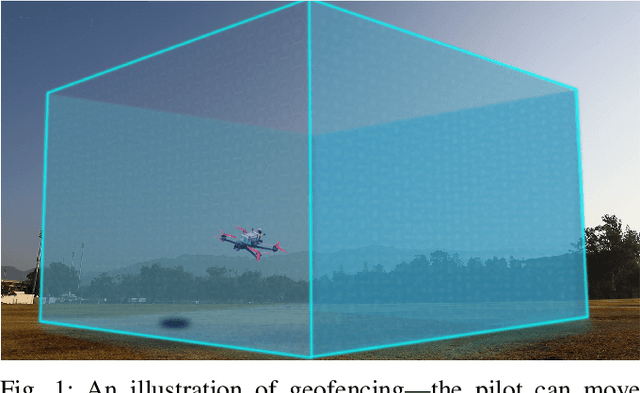
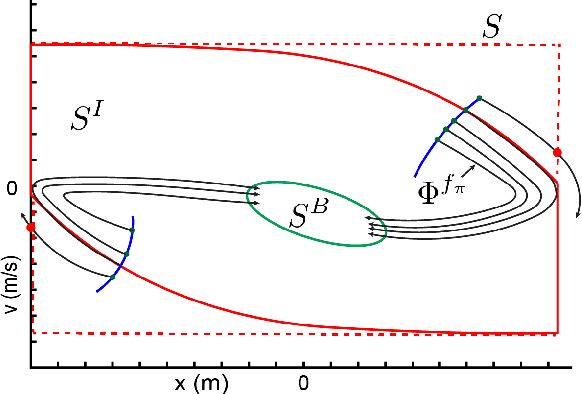
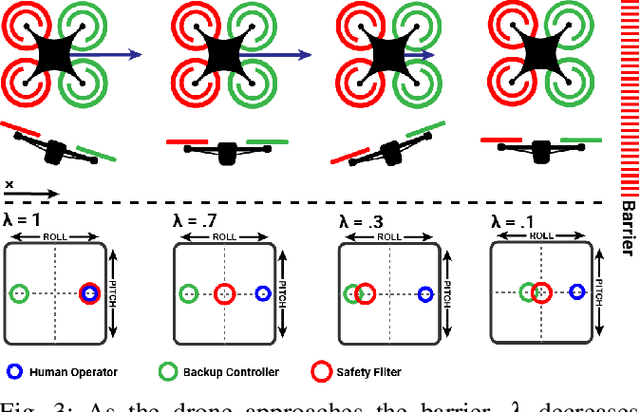
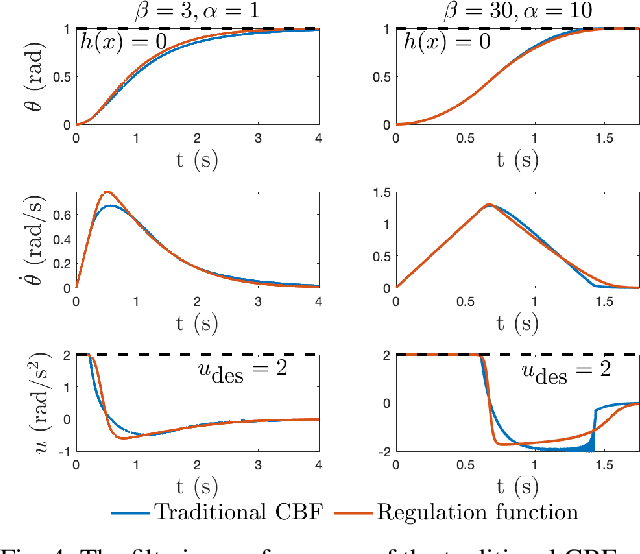
This paper details the theory and implementation behind practically ensuring safety of remotely piloted racing drones. We demonstrate robust and practical safety guarantees on a 7" racing drone at speeds exceeding 100 km/h, utilizing only online computations on a 10 gram micro-controller. To achieve this goal, we utilize the framework of control barrier functions (CBFs) which give guaranteed safety encoded as forward set invariance. To make this methodology practically applicable, we present an implicitly defined CBF which leverages backup controllers to enable gradient-free evaluations that ensure safety. The method applied to hardware results in smooth, minimally conservative alterations of the pilots' desired inputs, enabling them to push the limits of their drone without fear of crashing. Moreover, the method works in conjunction with the preexisting flight controller, resulting in unaltered flight when there are no nearby safety risks. Additional benefits include safety and stability of the drone when losing line-of-sight or in the event of radio failure.