 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Drone Flight with Time-Varying Backup Controllers
Jul 11, 2022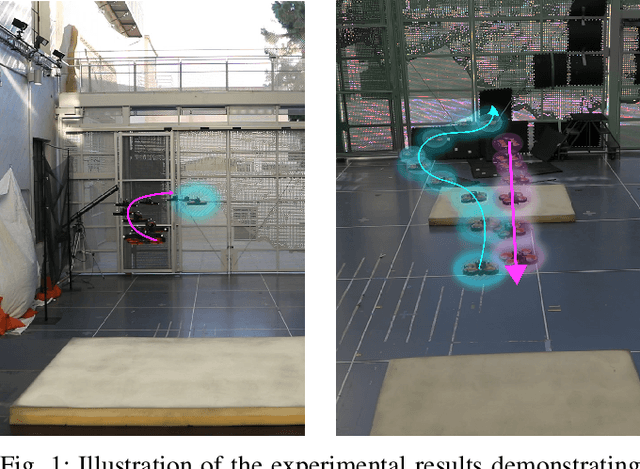
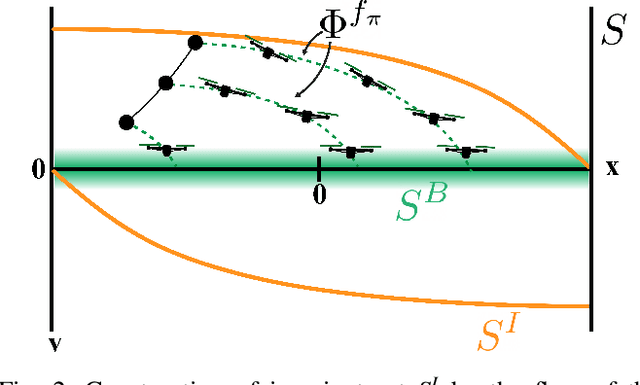
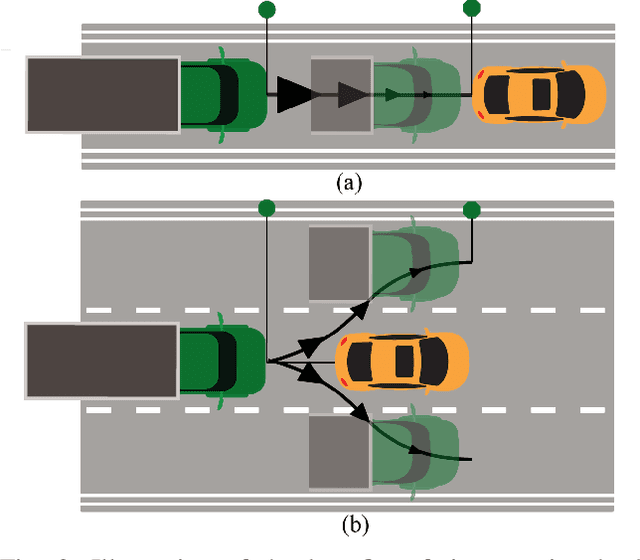
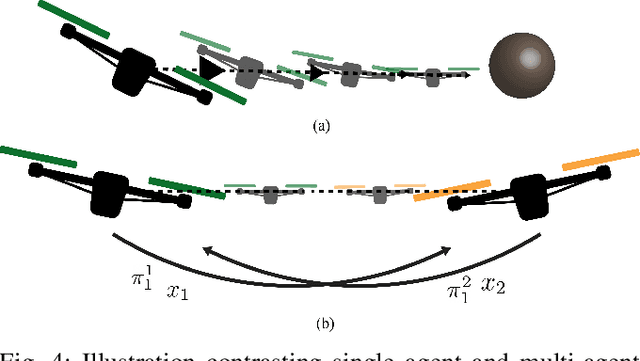
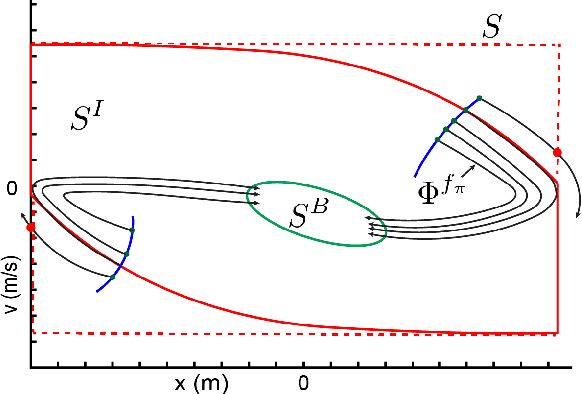
The weight, space, and power limitations of small aerial vehicles often prevent the application of modern control techniques without significant model simplifications. Moreover, high-speed agile behavior, such as that exhibited in drone racing, make these simplified models too unreliable for safety-critical control. In this work, we introduce the concept of time-varying backup controllers (TBCs): user-specified maneuvers combined with backup controllers that generate reference trajectories which guarantee the safety of nonlinear systems. TBCs reduce conservatism when compared to traditional backup controllers and can be directly applied to multi-agent coordination to guarantee safety. Theoretically, we provide conditions under which TBCs strictly reduce conservatism, describe how to switch between several TBC's and show how to embed TBCs in a multi-agent setting. Experimentally, we verify that TBCs safely increase operational freedom when filtering a pilot's actions and demonstrate robustness and computational efficiency when applied to decentralized safety filtering of two quadrotors.
Safety-Critical Manipulation for Collision-Free Food Preparation
May 02, 2022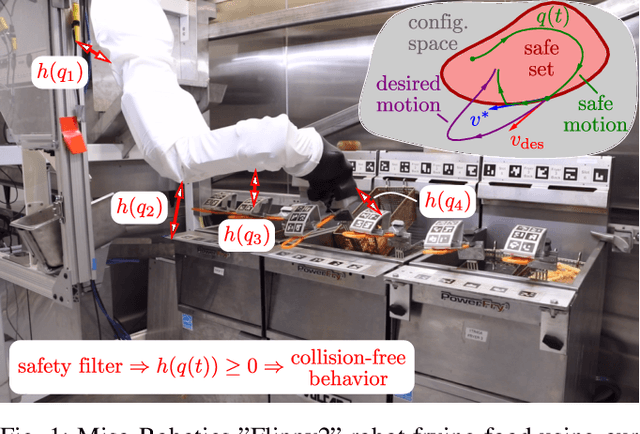

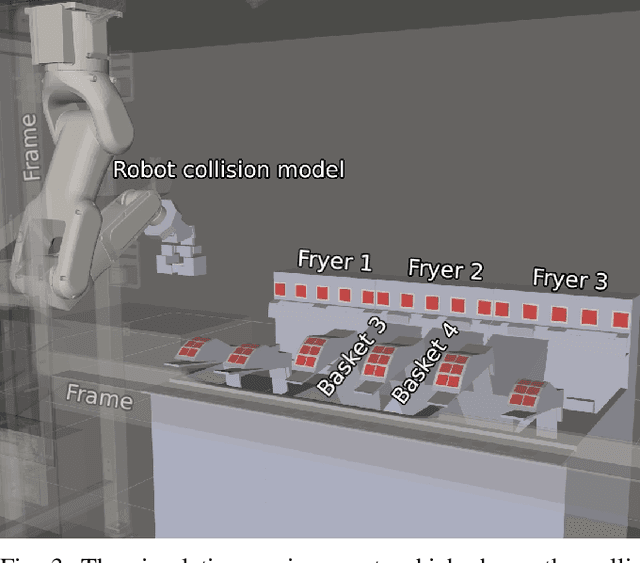
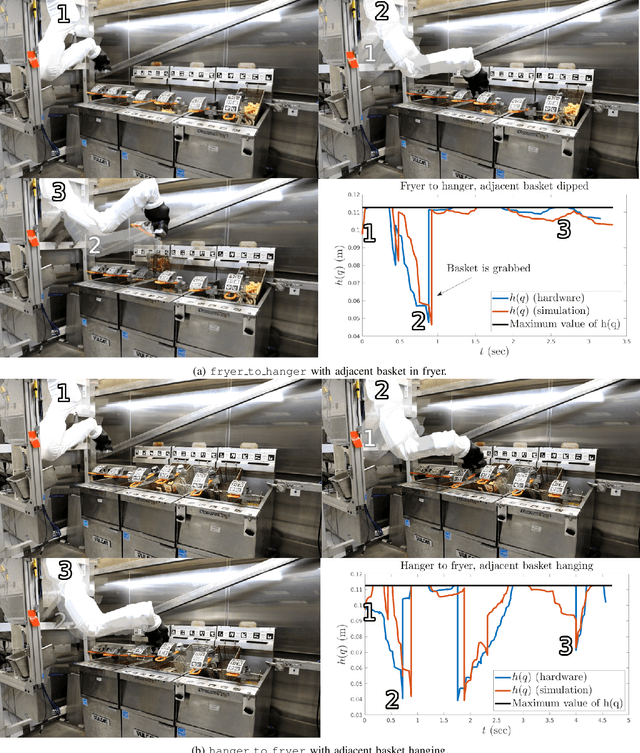
Recent advances allow for the automation of food preparation in high-throughput environments, yet the successful deployment of these robots requires the planning and execution of quick, robust, and ultimately collision-free behaviors. In this work, we showcase a novel framework for modifying previously generated trajectories of robotic manipulators in highly detailed and dynamic collision environments using Control Barrier Functions (CBFs). This method dynamically re-plans previously validated behaviors in the presence of changing environments -- and does so in a computationally efficient manner. Moreover, the approach provides rigorous safety guarantees of the resulting trajectories, factoring in the true underlying dynamics of the manipulator. This methodology is extensively validated on a full-scale robotic manipulator in a real-world cooking environment, and has resulted in substantial improvements in computation time and robustness over re-planning.
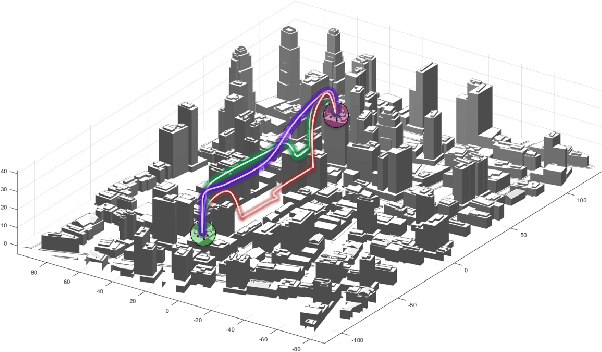
Onboard Safety Guarantees for Racing Drones: High-speed Geofencing with Control Barrier Functions
Jan 12, 2022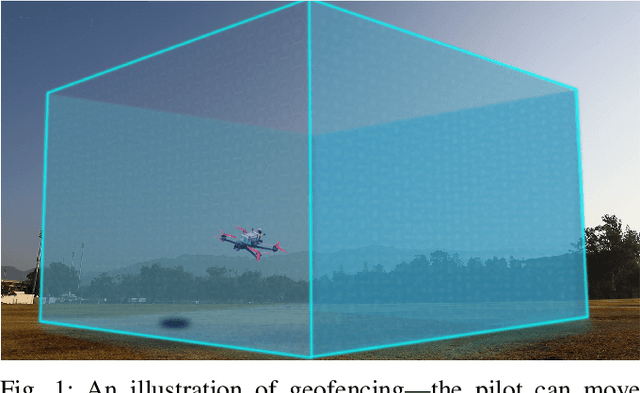
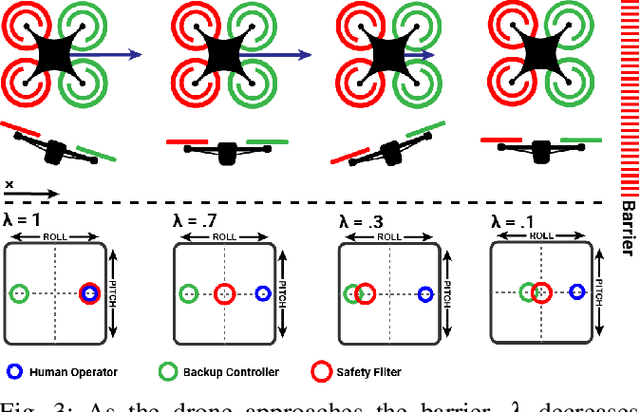
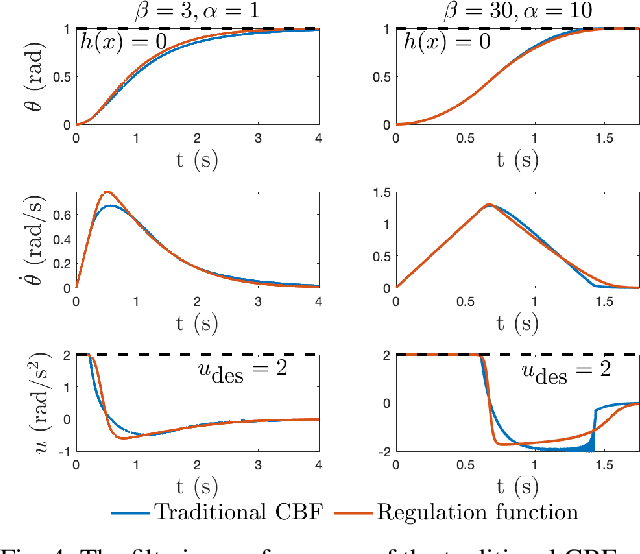
This paper details the theory and implementation behind practically ensuring safety of remotely piloted racing drones. We demonstrate robust and practical safety guarantees on a 7" racing drone at speeds exceeding 100 km/h, utilizing only online computations on a 10 gram micro-controller. To achieve this goal, we utilize the framework of control barrier functions (CBFs) which give guaranteed safety encoded as forward set invariance. To make this methodology practically applicable, we present an implicitly defined CBF which leverages backup controllers to enable gradient-free evaluations that ensure safety. The method applied to hardware results in smooth, minimally conservative alterations of the pilots' desired inputs, enabling them to push the limits of their drone without fear of crashing. Moreover, the method works in conjunction with the preexisting flight controller, resulting in unaltered flight when there are no nearby safety risks. Additional benefits include safety and stability of the drone when losing line-of-sight or in the event of radio failure.
Mixed Observable RRT: Multi-Agent Mission-Planning in Partially Observable Environments
Oct 03, 2021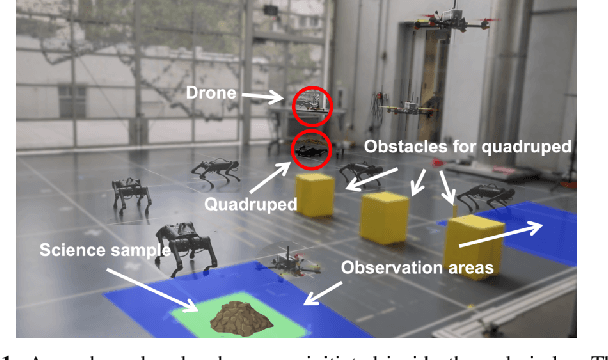
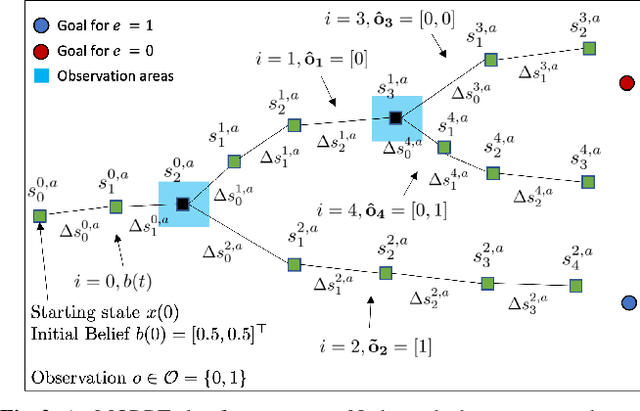

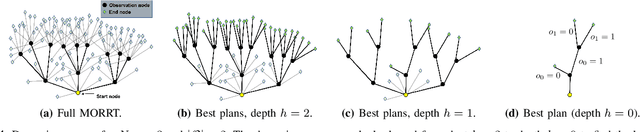
This paper considers centralized mission-planning for a heterogeneous multi-agent system with the aim of locating a hidden target. We propose a mixed observable setting, consisting of a fully observable state-space and a partially observable environment, using a hidden Markov model. First, we construct rapidly exploring random trees (RRTs) to introduce the mixed observable RRT for finding plausible mission plans giving way-points for each agent. Leveraging this construction, we present a path-selection strategy based on a dynamic programming approach, which accounts for the uncertainty from partial observations and minimizes the expected cost. Finally, we combine the high-level plan with model predictive controllers to evaluate the approach on an experimental setup consisting of a quadruped robot and a drone. It is shown that agents are able to make intelligent decisions to explore the area efficiently and to locate the target through collaborative actions.
Lidar-based exploration and discretization for mobile robot planning
Nov 19, 2020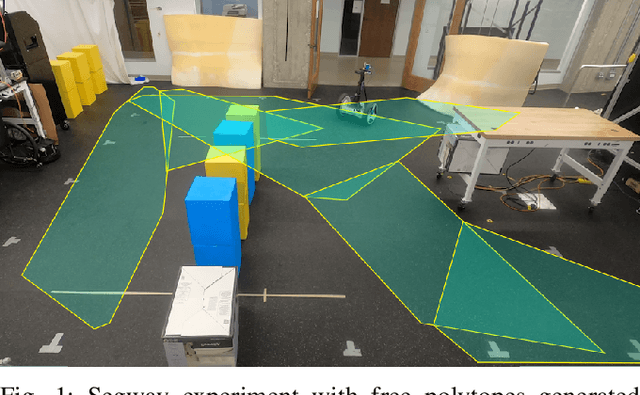
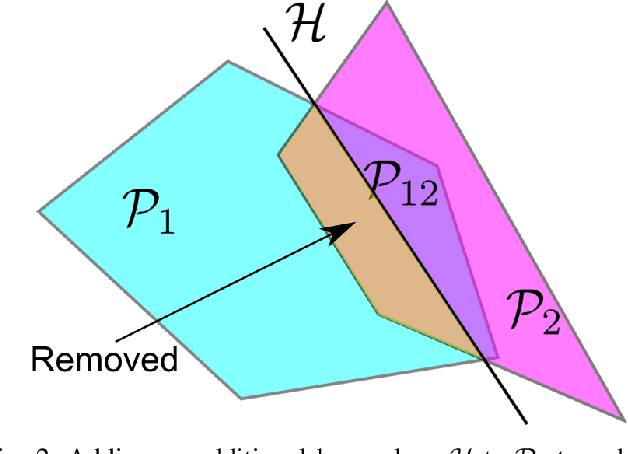

In robotic applications, the control, and actuation deal with a continuous description of the system and environment, while high-level planning usually works with a discrete description. This paper considers the problem of bridging the low-level control and high-level planning for robotic systems via sensor data. In particular, we propose a discretization algorithm that identifies free polytopes via lidar point cloud data. A transition graph is then constructed where each node corresponds to a free polytope and two nodes are connected with an edge if the two corresponding free polytopes intersect. Furthermore, a distance measure is associated with each edge, which allows for the assessment of quality (or cost) of the transition for high-level planning. For the low-level control, the free polytopes act as a convenient encoding of the environment and allow for the planning of collision-free trajectories that realizes the high-level plan. The results are demonstrated in high-fidelity ROS simulations and experiments with a drone and a Segway.
Comparative Analysis of Control Barrier Functions and Artificial Potential Fields for Obstacle Avoidance
Oct 19, 2020
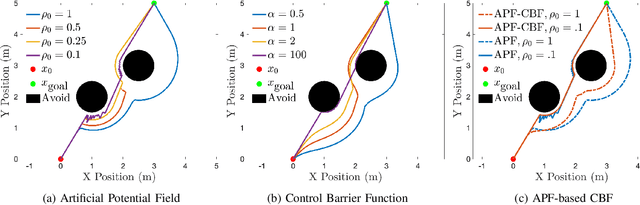
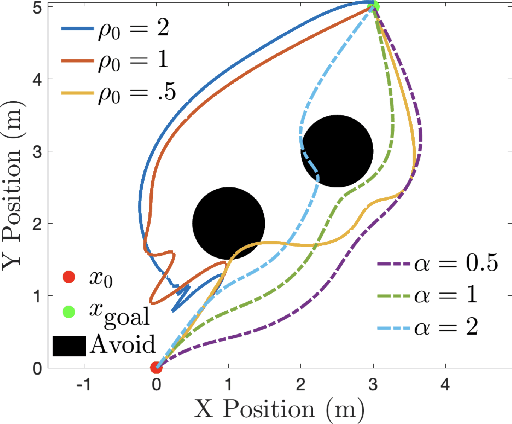

Artificial potential fields (APFs) and their variants have been a staple for collision avoidance of mobile robots and manipulators for almost 40 years. Its model-independent nature, ease of implementation, and real-time performance have played a large role in its continued success over the years. Control barrier functions (CBFs), on the other hand, are a more recent development, commonly used to guarantee safety for nonlinear systems in real-time in the form of a filter on a nominal controller. In this paper, we address the connections between APFs and CBFs. At a theoretic level, we prove that APFs are a special case of CBFs: given a APF one obtains a CBFs, while the converse is not true. Additionally, we prove that CBFs obtained from APFs have additional beneficial properties and can be applied to nonlinear systems. Practically, we compare the performance of APFs and CBFs in the context of obstacle avoidance on simple illustrative examples and for a quadrotor, both in simulation and on hardware using onboard sensing. These comparisons demonstrate that CBFs outperform APFs.
Nonlinear Model Predictive Control of Robotic Systems with Control Lyapunov Functions
Jun 01, 2020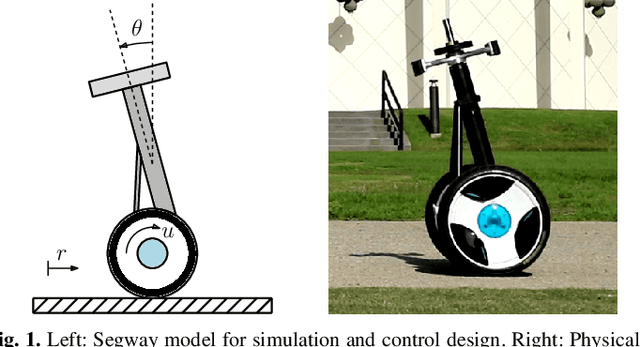
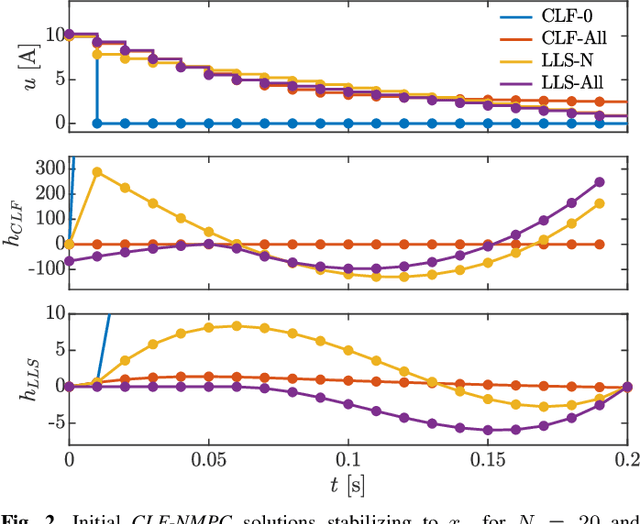
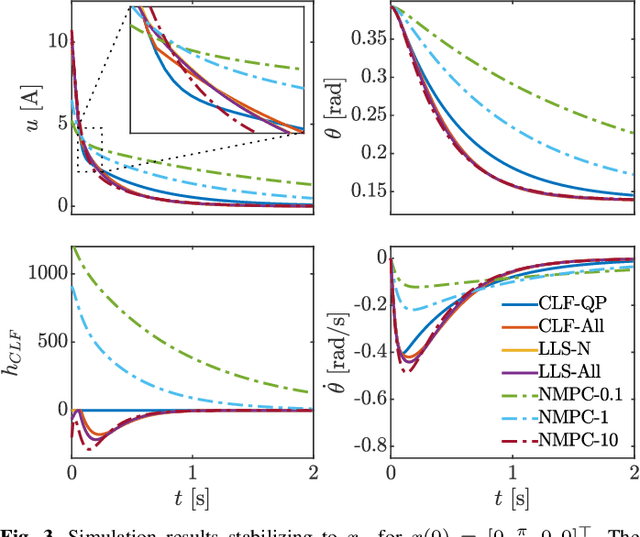
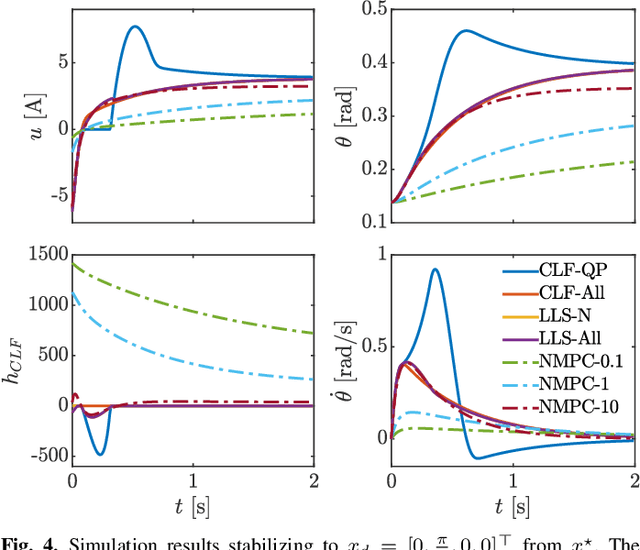
The theoretical unification of Nonlinear Model Predictive Control (NMPC) with Control Lyapunov Functions (CLFs) provides a framework for achieving optimal control performance while ensuring stability guarantees. In this paper we present the first real-time realization of a unified NMPC and CLF controller on a robotic system with limited computational resources. These limitations motivate a set of approaches for efficiently incorporating CLF stability constraints into a general NMPC formulation. We evaluate the performance of the proposed methods compared to baseline CLF and NMPC controllers with a robotic Segway platform both in simulation and on hardware. The addition of a prediction horizon provides a performance advantage over CLF based controllers, which operate optimally point-wise in time. Moreover, the explicitly imposed stability constraints remove the need for difficult cost function and parameter tuning required by NMPC. Therefore the unified controller improves the performance of each isolated controller and simplifies the overall design process.
Barrier Functions for Multiagent-POMDPs with DTL Specifications
Mar 19, 2020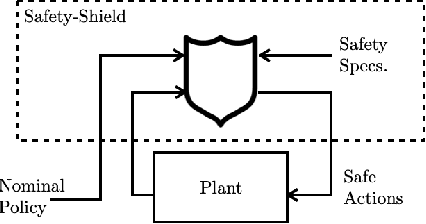
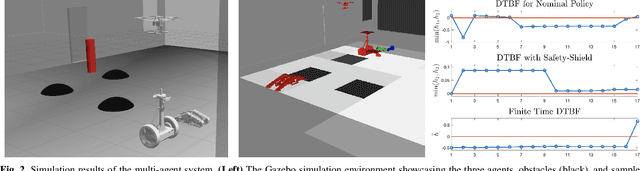
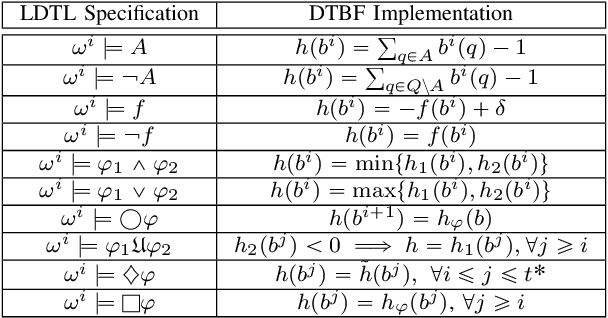
Multi-agent partially observable Markov decision processes (MPOMDPs) provide a framework to represent heterogeneous autonomous agents subject to uncertainty and partial observation. In this paper, given a nominal policy provided by a human operator or a conventional planning method, we propose a technique based on barrier functions to design a minimally interfering safety-shield ensuring satisfaction of high-level specifications in terms of linear distribution temporal logic (LDTL). To this end, we use sufficient and necessary conditions for the invariance of a given set based on discrete-time barrier functions (DTBFs) and formulate sufficient conditions for finite time DTBF to study finite time convergence to a set. We then show that different LDTL mission/safety specifications can be cast as a set of invariance or finite time reachability problems. We demonstrate that the proposed method for safety-shield synthesis can be implemented online by a sequence of one-step greedy algorithms. We demonstrate the efficacy of the proposed method using experiments involving a team of robots.
Learning for Safety-Critical Control with Control Barrier Functions
Dec 20, 2019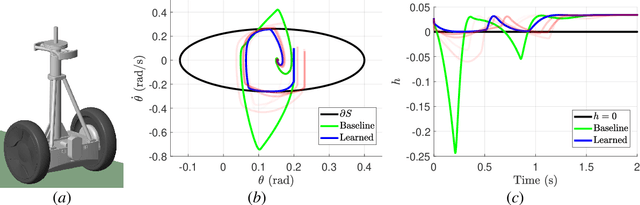
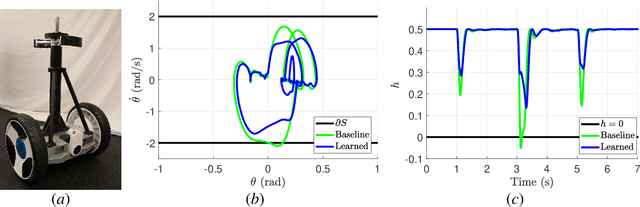
Modern nonlinear control theory seeks to endow systems with properties of stability and safety, and have been deployed successfully in multiple domains. Despite this success, model uncertainty remains a significant challenge in synthesizing safe controllers, leading to degradation in the properties provided by the controllers. This paper develops a machine learning framework utilizing Control Barrier Functions (CBFs) to reduce model uncertainty as it impact the safe behavior of a system. This approach iteratively collects data and updates a controller, ultimately achieving safe behavior. We validate this method in simulation and experimentally on a Segway platform.
Optimal Motion Planning for Multi-Modal Hybrid Locomotion
Sep 23, 2019


Hybrid locomotion, which combines multiple modalities of locomotion within a single robot, can enable robots to carry out complex tasks in diverse environments. This paper presents a novel method of combining graph search and trajectory optimization for planning multi-modal locomotion trajectories. We also introduce methods that allow the method to work tractably in higher dimensional state spaces. Through the examples of a hybrid double-integrator, amphibious robot, and the flying-driving drone, we show that our planner tractably gives full-state trajectories that are probabilistically optimal and dynamically feasible.