 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety Guardrails in the Sky: Realizing Control Barrier Functions on the VISTA F-16 Jet
Mar 29, 2026The advancement of autonomous systems -- from legged robots to self-driving vehicles and aircraft -- necessitates executing increasingly high-performance and dynamic motions without ever putting the system or its environment in harm's way. In this paper, we introduce Guardrails -- a novel runtime assurance mechanism that guarantees dynamic safety for autonomous systems, allowing them to safely evolve on the edge of their operational domains. Rooted in the theory of control barrier functions, Guardrails offers a control strategy that carefully blends commands from a human or AI operator with safe control actions to guarantee safe behavior. To demonstrate its capabilities, we implemented Guardrails on an F-16 fighter jet and conducted flight tests where Guardrails supervised a human pilot to enforce g-limits, altitude bounds, geofence constraints, and combinations thereof. Throughout extensive flight testing, Guardrails successfully ensured safety, keeping the pilot in control when safe to do so and minimally modifying unsafe pilot inputs otherwise.
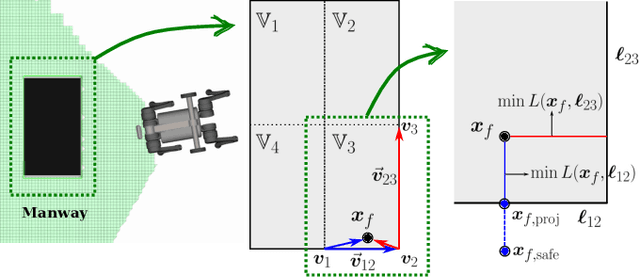
Navigating Polytopes with Safety: A Control Barrier Function Approach
May 22, 2025



Collision-free motion is a fundamental requirement for many autonomous systems. This paper develops a safety-critical control approach for the collision-free navigation of polytope-shaped agents in polytope-shaped environments. A systematic method is proposed to generate control barrier function candidates in closed form that lead to controllers with formal safety guarantees. The proposed approach is demonstrated through simulation, with obstacle avoidance examples in 2D and 3D, including dynamically changing environments.
Safety-Critical Controller Synthesis with Reduced-Order Models
Nov 25, 2024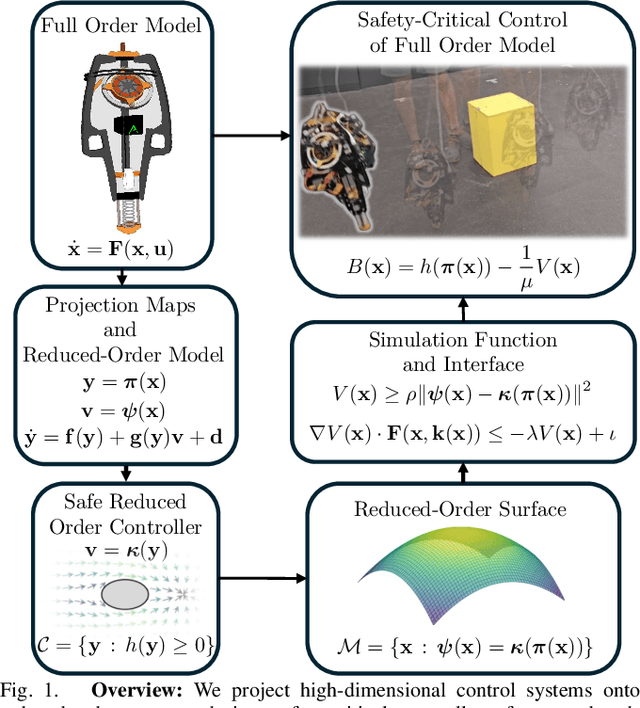
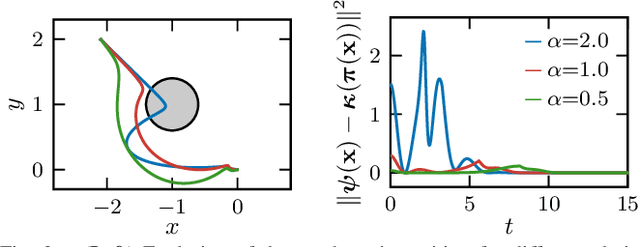
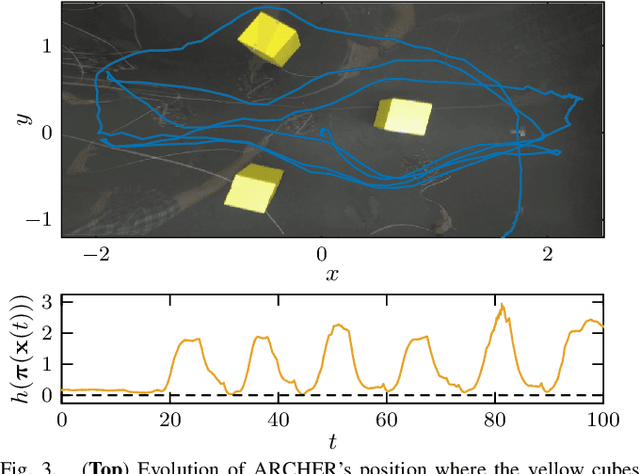
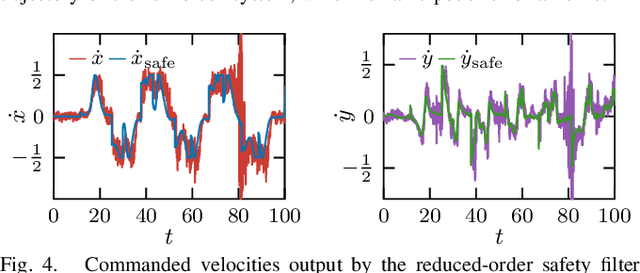
Reduced-order models (ROMs) provide lower dimensional representations of complex systems, capturing their salient features while simplifying control design. Building on previous work, this paper presents an overarching framework for the integration of ROMs and control barrier functions, enabling the use of simplified models to construct safety-critical controllers while providing safety guarantees for complex full-order models. To achieve this, we formalize the connection between full and ROMs by defining projection mappings that relate the states and inputs of these models and leverage simulation functions to establish conditions under which safety guarantees may be transferred from a ROM to its corresponding full-order model. The efficacy of our framework is illustrated through simulation results on a drone and hardware demonstrations on ARCHER, a 3D hopping robot.
Disturbance-Robust Backup Control Barrier Functions: Safety Under Uncertain Dynamics
Sep 12, 2024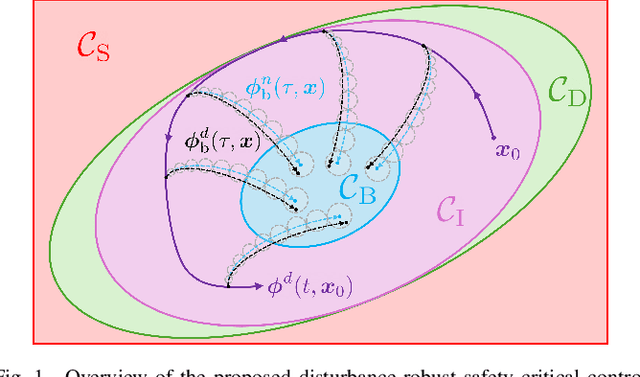
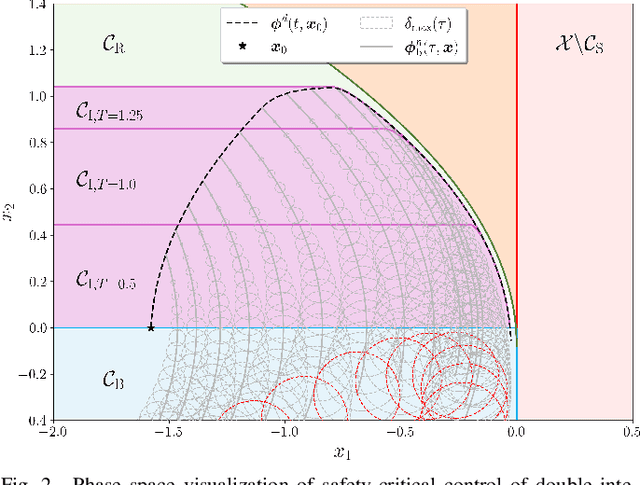
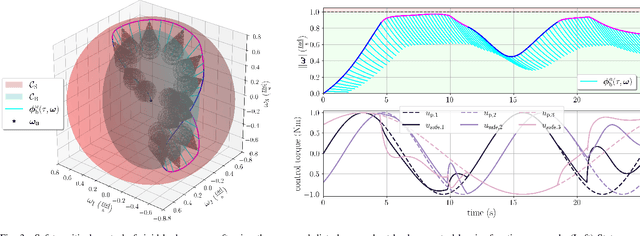
Obtaining a controlled invariant set is crucial for safety-critical control with control barrier functions (CBFs) but is non-trivial for complex nonlinear systems and constraints. Backup control barrier functions allow such sets to be constructed online in a computationally tractable manner by examining the evolution (or flow) of the system under a known backup control law. However, for systems with unmodeled disturbances, this flow cannot be directly computed, making the current methods inadequate for assuring safety in these scenarios. To address this gap, we leverage bounds on the nominal and disturbed flow to compute a forward invariant set online by ensuring safety of an expanding norm ball tube centered around the nominal system evolution. We prove that this set results in robust control constraints which guarantee safety of the disturbed system via our Disturbance-Robust Backup Control Barrier Function (DR-BCBF) solution. Additionally, the efficacy of the proposed framework is demonstrated in simulation, applied to a double integrator problem and a rigid body spacecraft rotation problem with rate constraints.
Safety-Critical Control for Autonomous Systems: Control Barrier Functions via Reduced-Order Models
Mar 14, 2024
Modern autonomous systems, such as flying, legged, and wheeled robots, are generally characterized by high-dimensional nonlinear dynamics, which presents challenges for model-based safety-critical control design. Motivated by the success of reduced-order models in robotics, this paper presents a tutorial on constructive safety-critical control via reduced-order models and control barrier functions (CBFs). To this end, we provide a unified formulation of techniques in the literature that share a common foundation of constructing CBFs for complex systems from CBFs for much simpler systems. Such ideas are illustrated through formal results, simple numerical examples, and case studies of real-world systems to which these techniques have been experimentally applied.
Collision Avoidance and Geofencing for Fixed-wing Aircraft with Control Barrier Functions
Mar 07, 2024



Safety-critical failures often have fatal consequences in aerospace control. Control systems on aircraft, therefore, must ensure the strict satisfaction of safety constraints, preferably with formal guarantees of safe behavior. This paper establishes the safety-critical control of fixed-wing aircraft in collision avoidance and geofencing tasks. A control framework is developed wherein a run-time assurance (RTA) system modulates the nominal flight controller of the aircraft whenever necessary to prevent it from colliding with other aircraft or crossing a boundary (geofence) in space. The RTA is formulated as a safety filter using control barrier functions (CBFs) with formal guarantees of safe behavior. CBFs are constructed and compared for a nonlinear kinematic fixed-wing aircraft model. The proposed CBF-based controllers showcase the capability of safely executing simultaneous collision avoidance and geofencing, as demonstrated by simulations on the kinematic model and a high-fidelity dynamical model.
Safety-critical Control of Quadrupedal Robots with Rolling Arms for Autonomous Inspection of Complex Environments
Dec 12, 2023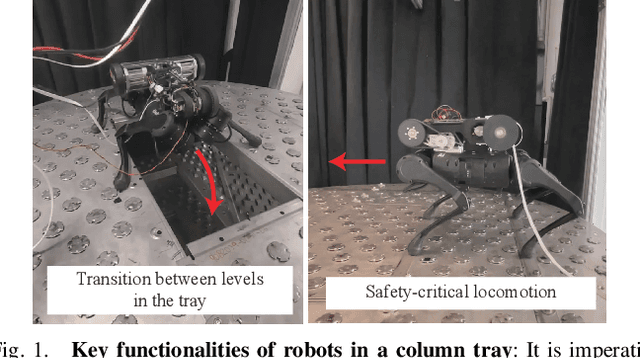
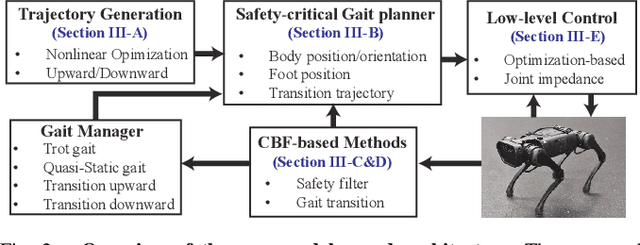
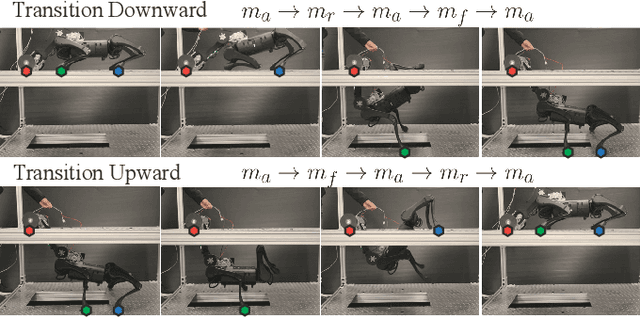
This paper presents a safety-critical control framework tailored for quadruped robots equipped with a roller arm, particularly when performing locomotive tasks such as autonomous robotic inspection in complex, multi-tiered environments. In this study, we consider the problem of operating a quadrupedal robot in distillation columns, locomoting on column trays and transitioning between these trays with a roller arm. To address this problem, our framework encompasses the following key elements: 1) Trajectory generation for seamless transitions between columns, 2) Foothold re-planning in regions deemed unsafe, 3) Safety-critical control incorporating control barrier functions, 4) Gait transitions based on safety levels, and 5) A low-level controller. Our comprehensive framework, comprising these components, enables autonomous and safe locomotion across multiple layers. We incorporate reduced-order and full-body models to ensure safety, integrating safety-critical control and footstep re-planning approaches. We validate the effectiveness of our proposed framework through practical experiments involving a quadruped robot equipped with a roller arm, successfully navigating and transitioning between different levels within the column tray structure.
A Learning-Based Framework for Safe Human-Robot Collaboration with Multiple Backup Control Barrier Functions
Oct 09, 2023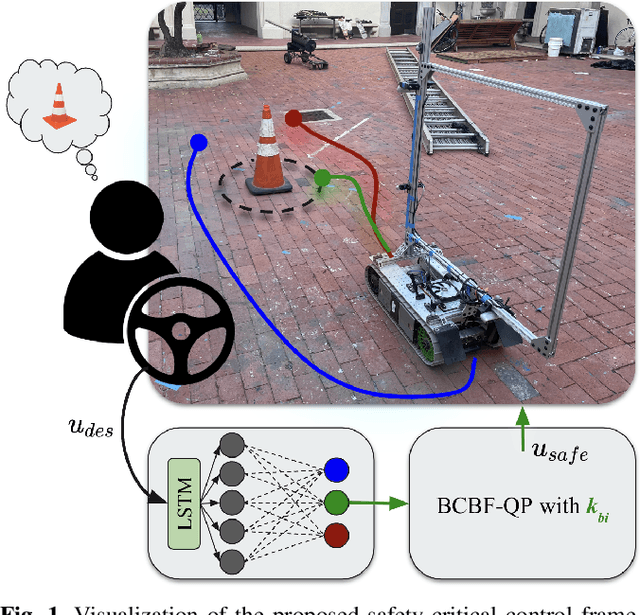
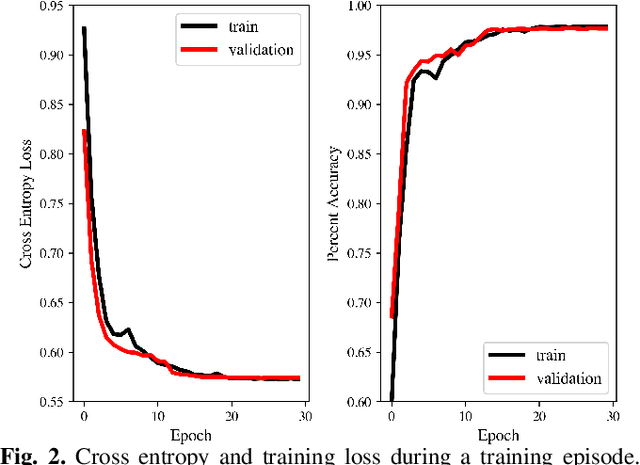
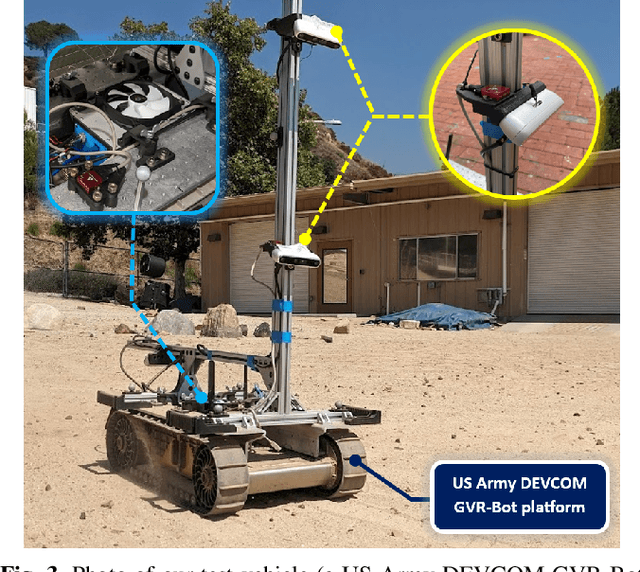
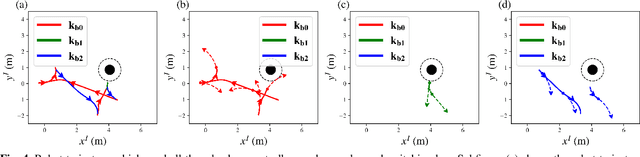
Ensuring robot safety in complex environments is a difficult task due to actuation limits, such as torque bounds. This paper presents a safety-critical control framework that leverages learning-based switching between multiple backup controllers to formally guarantee safety under bounded control inputs while satisfying driver intention. By leveraging backup controllers designed to uphold safety and input constraints, backup control barrier functions (BCBFs) construct implicitly defined control invariance sets via a feasible quadratic program (QP). However, BCBF performance largely depends on the design and conservativeness of the chosen backup controller, especially in our setting of human-driven vehicles in complex, e.g, off-road, conditions. While conservativeness can be reduced by using multiple backup controllers, determining when to switch is an open problem. Consequently, we develop a broadcast scheme that estimates driver intention and integrates BCBFs with multiple backup strategies for human-robot interaction. An LSTM classifier uses data inputs from the robot, human, and safety algorithms to continually choose a backup controller in real-time. We demonstrate our method's efficacy on a dual-track robot in obstacle avoidance scenarios. Our framework guarantees robot safety while adhering to driver intention.
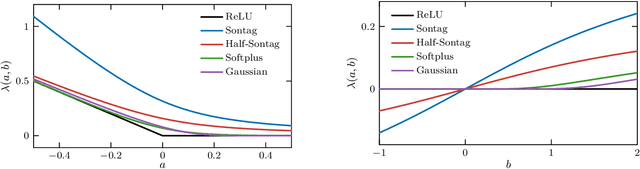
Composing Control Barrier Functions for Complex Safety Specifications
Sep 13, 2023The increasing complexity of control systems necessitates control laws that guarantee safety w.r.t. complex combinations of constraints. In this letter, we propose a framework to describe compositional safety specifications with control barrier functions (CBFs). The specifications are formulated as Boolean compositions of state constraints, and we propose an algorithmic way to create a single continuously differentiable CBF that captures these constraints and enables safety-critical control. We describe the properties of the proposed CBF, and we demonstrate its efficacy by numerical simulations.
On the Safety of Connected Cruise Control: Analysis and Synthesis with Control Barrier Functions
Aug 31, 2023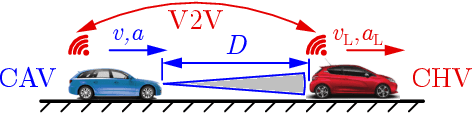
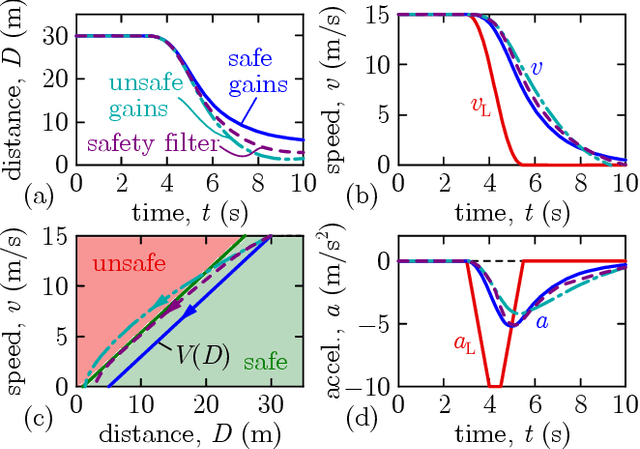
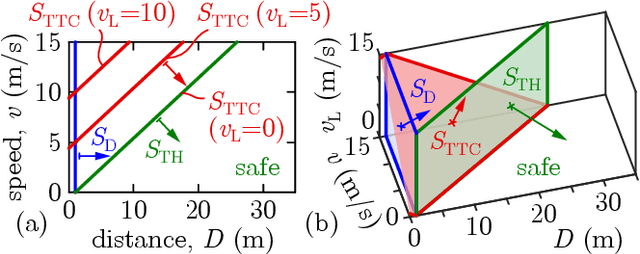
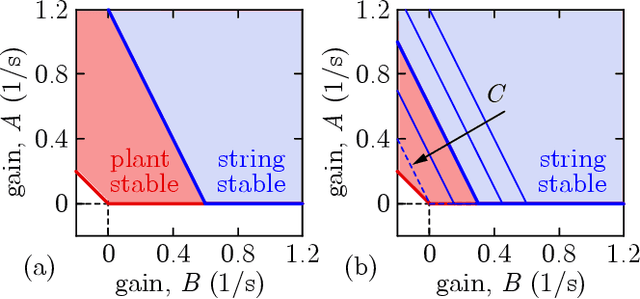
Connected automated vehicles have shown great potential to improve the efficiency of transportation systems in terms of passenger comfort, fuel economy, stability of driving behavior and mitigation of traffic congestions. Yet, to deploy these vehicles and leverage their benefits, the underlying algorithms must ensure their safe operation. In this paper, we address the safety of connected cruise control strategies for longitudinal car following using control barrier function (CBF) theory. In particular, we consider various safety measures such as minimum distance, time headway and time to conflict, and provide a formal analysis of these measures through the lens of CBFs. Additionally, motivated by how stability charts facilitate stable controller design, we derive safety charts for existing connected cruise controllers to identify safe choices of controller parameters. Finally, we combine the analysis of safety measures and the corresponding stability charts to synthesize safety-critical connected cruise controllers using CBFs. We verify our theoretical results by numerical simulations.