 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Rate Nonlinear Model Predictive Control for Wall-Supported Bipedal Locomotion of Quadrupedal Robots
Jul 02, 2026This paper presents a novel layered planning and control framework based on multi-rate nonlinear model predictive control (MR-NMPC) that enables quadrupedal robots to perform hybrid bipedal locomotion with wall-assisted support in constrained environments. Real-time trajectory optimization for this locomotion presents significant challenges, as the controller must simultaneously plan for both the contact points and the continuous trajectories of the robot's center of mass (CoM) and orientation within the robot's nonlinear dynamics while accounting for unilateral contact constraints, underactuation, and the switching nature of the robot's dynamics. At the high level of the control framework, an MR-NMPC is proposed, which dynamically plans both the discrete-time trajectories of the contact points and the continuous-time trajectories of the CoM and orientation, using a single rigid body (SRB) dynamics model. By incorporating contact-point planning within the multi-rate optimal control framework, this approach enhances dynamic stability compared to heuristic foot placement strategies. At the low level of the control framework, a nonlinear whole-body controller (WBC) based on virtual constraints and a quadratic program enforces full-order dynamics and tracks the MR-NMPC references. The proposed approach is validated through extensive numerical simulations demonstrating the robust wall-assisted bipedal locomotion of a Unitree A1 quadrupedal robot on rough terrains and under external disturbances in a constrained environment. Comparative analysis shows that the proposed MR-NMPC achieves a 2.9 times higher success rate compared to conventional MPC with heuristic-based foot placement strategies in negotiating irregular terrain at high speeds.
Safety-Critical Centralized Nonlinear MPC for Cooperative Payload Transportation by Two Quadrupedal Robots
Apr 03, 2026This paper presents a safety-critical centralized nonlinear model predictive control (NMPC) framework for cooperative payload transportation by two quadrupedal robots. The interconnected robot-payload system is modeled as a discrete-time nonlinear differential-algebraic system, capturing the coupled dynamics through holonomic constraints and interaction wrenches. To ensure safety in complex environments, we develop a control barrier function (CBF)-based NMPC formulation that enforces collision avoidance constraints for both the robots and the payload. The proposed approach retains the interaction wrenches as decision variables, resulting in a structured DAE-constrained optimal control problem that enables efficient real-time implementation. The effectiveness of the algorithm is validated through extensive hardware experiments on two Unitree Go2 platforms performing cooperative payload transportation in cluttered environments under mass and inertia uncertainty and external push disturbances.
ADMM-Based Distributed MPC with Control Barrier Functions for Safe Multi-Robot Quadrupedal Locomotion
Mar 19, 2026This paper proposes a fully decentralized model predictive control (MPC) framework with control barrier function (CBF) constraints for safety-critical trajectory planning in multi-robot legged systems. The incorporation of CBF constraints introduces explicit inter-agent coupling, which prevents direct decomposition of the resulting optimal control problems. To address this challenge, we reformulate the centralized safety-critical MPC problem using a structured distributed optimization framework based on the alternating direction method of multipliers (ADMM). By introducing a novel node-edge splitting formulation with consensus constraints, the proposed approach decomposes the global problem into independent node-local and edge-local quadratic programs that can be solved in parallel using only neighbor-to-neighbor communication. This enables fully decentralized trajectory optimization with symmetric computational load across agents while preserving safety and dynamic feasibility. The proposed framework is integrated into a hierarchical locomotion control architecture for quadrupedal robots, combining high-level distributed trajectory planning, mid-level nonlinear MPC enforcing single rigid body dynamics, and low-level whole-body control enforcing full-order robot dynamics. The effectiveness of the proposed approach is demonstrated through hardware experiments on two Unitree Go2 quadrupedal robots and numerical simulations involving up to four robots navigating uncertain environments with rough terrain and external disturbances. The results show that the proposed distributed formulation achieves performance comparable to centralized MPC while reducing the average per-cycle planning time by up to 51% in the four-agent case, enabling efficient real-time decentralized implementation.
Hybrid Data-Driven Predictive Control for Robust and Reactive Exoskeleton Locomotion Synthesis
Aug 14, 2025Robust bipedal locomotion in exoskeletons requires the ability to dynamically react to changes in the environment in real time. This paper introduces the hybrid data-driven predictive control (HDDPC) framework, an extension of the data-enabled predictive control, that addresses these challenges by simultaneously planning foot contact schedules and continuous domain trajectories. The proposed framework utilizes a Hankel matrix-based representation to model system dynamics, incorporating step-to-step (S2S) transitions to enhance adaptability in dynamic environments. By integrating contact scheduling with trajectory planning, the framework offers an efficient, unified solution for locomotion motion synthesis that enables robust and reactive walking through online replanning. We validate the approach on the Atalante exoskeleton, demonstrating improved robustness and adaptability.
A Nonlinear MPC Framework for Loco-Manipulation of Quadrupedal Robots with Non-Negligible Manipulator Dynamics
Jul 29, 2025Model predictive control (MPC) combined with reduced-order template models has emerged as a powerful tool for trajectory optimization in dynamic legged locomotion. However, loco-manipulation tasks performed by legged robots introduce additional complexity, necessitating computationally efficient MPC algorithms capable of handling high-degree-of-freedom (DoF) models. This letter presents a computationally efficient nonlinear MPC (NMPC) framework tailored for loco-manipulation tasks of quadrupedal robots equipped with robotic manipulators whose dynamics are non-negligible relative to those of the quadruped. The proposed framework adopts a decomposition strategy that couples locomotion template models -- such as the single rigid body (SRB) model -- with a full-order dynamic model of the robotic manipulator for torque-level control. This decomposition enables efficient real-time solution of the NMPC problem in a receding horizon fashion at 60 Hz. The optimal state and input trajectories generated by the NMPC for locomotion are tracked by a low-level nonlinear whole-body controller (WBC) running at 500 Hz, while the optimal torque commands for the manipulator are directly applied. The layered control architecture is validated through extensive numerical simulations and hardware experiments on a 15-kg Unitree Go2 quadrupedal robot augmented with a 4.4-kg 4-DoF Kinova arm. Given that the Kinova arm dynamics are non-negligible relative to the Go2 base, the proposed NMPC framework demonstrates robust stability in performing diverse loco-manipulation tasks, effectively handling external disturbances, payload variations, and uneven terrain.
Safety-Critical and Distributed Nonlinear Predictive Controllers for Teams of Quadrupedal Robots
Mar 18, 2025This paper presents a novel hierarchical, safety-critical control framework that integrates distributed nonlinear model predictive controllers (DNMPCs) with control barrier functions (CBFs) to enable cooperative locomotion of multi-agent quadrupedal robots in complex environments. While NMPC-based methods are widely adopted for enforcing safety constraints and navigating multi-robot systems (MRSs) through intricate environments, ensuring the safety of MRSs requires a formal definition grounded in the concept of invariant sets. CBFs, typically implemented via quadratic programs (QPs) at the planning layer, provide formal safety guarantees. However, their zero-control horizon limits their effectiveness for extended trajectory planning in inherently unstable, underactuated, and nonlinear legged robot models. Furthermore, the integration of CBFs into real-time NMPC for sophisticated MRSs, such as quadrupedal robot teams, remains underexplored. This paper develops computationally efficient, distributed NMPC algorithms that incorporate CBF-based collision safety guarantees within a consensus protocol, enabling longer planning horizons for safe cooperative locomotion under disturbances and rough terrain conditions. The optimal trajectories generated by the DNMPCs are tracked using full-order, nonlinear whole-body controllers at the low level. The proposed approach is validated through extensive numerical simulations with up to four Unitree A1 robots and hardware experiments involving two A1 robots subjected to external pushes, rough terrain, and uncertain obstacle information. Comparative analysis demonstrates that the proposed CBF-based DNMPCs achieve a 27.89% higher success rate than conventional NMPCs without CBF constraints.
Robust Adaptive Safe Robotic Grasping with Tactile Sensing
Nov 12, 2024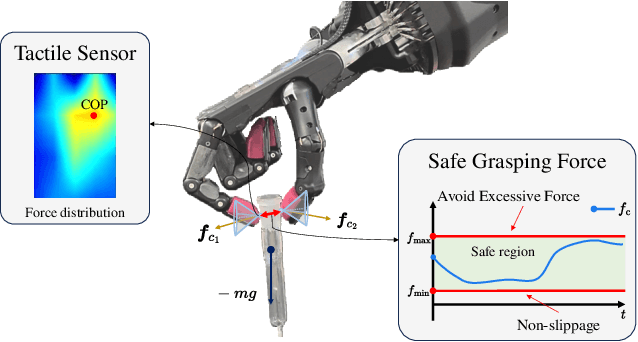
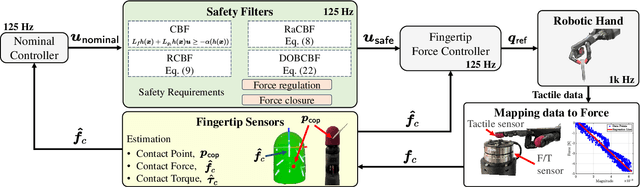
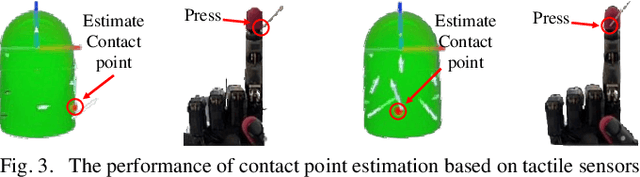
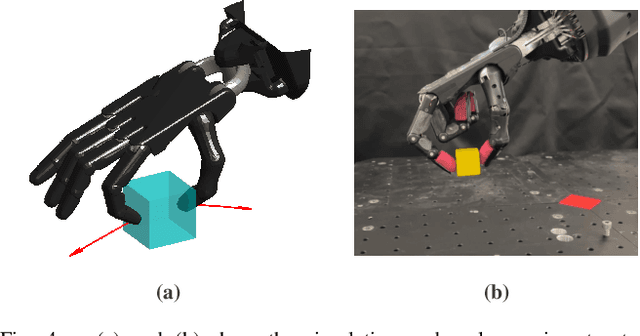
Robotic grasping requires safe force interaction to prevent a grasped object from being damaged or slipping out of the hand. In this vein, this paper proposes an integrated framework for grasping with formal safety guarantees based on Control Barrier Functions. We first design contact force and force closure constraints, which are enforced by a safety filter to accomplish safe grasping with finger force control. For sensory feedback, we develop a technique to estimate contact point, force, and torque from tactile sensors at each finger. We verify the framework with various safety filters in a numerical simulation under a two-finger grasping scenario. We then experimentally validate the framework by grasping multiple objects, including fragile lab glassware, in a real robotic setup, showing that safe grasping can be successfully achieved in the real world. We evaluate the performance of each safety filter in the context of safety violation and conservatism, and find that disturbance observer-based control barrier functions provide superior performance for safety guarantees with minimum conservatism. The demonstration video is available at https://youtu.be/Cuj47mkXRdg.
Safety-critical Locomotion of Biped Robots in Infeasible Paths: Overcoming Obstacles during Navigation toward Destination
Sep 16, 2024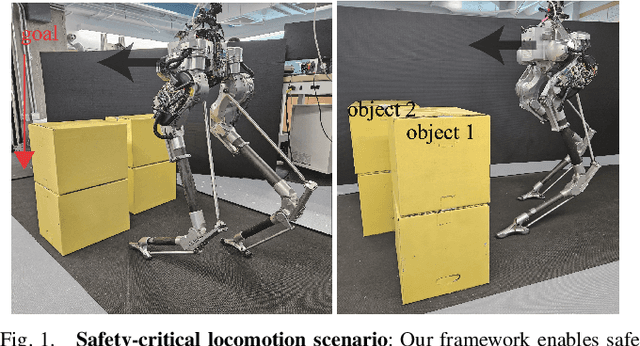
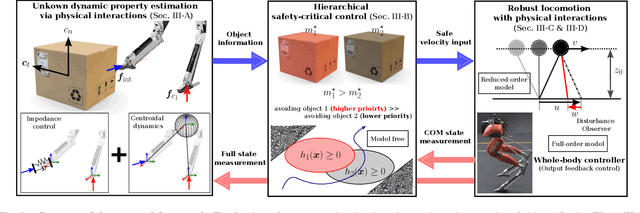
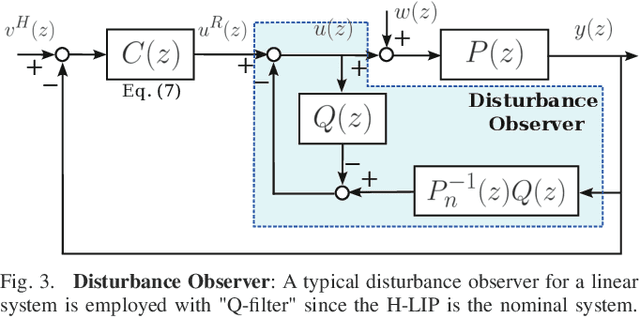
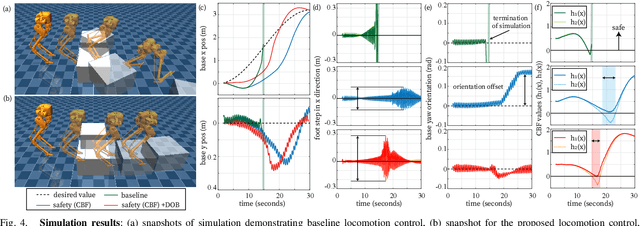
This paper proposes a safety-critical locomotion control framework employed for legged robots exploring through infeasible path in obstacle-rich environments. Our research focus is on achieving safe and robust locomotion where robots confront unavoidable obstacles en route to their designated destination. Through the utilization of outcomes from physical interactions with unknown objects, we establish a hierarchy among the safety-critical conditions avoiding the obstacles. This hierarchy enables the generation of a safe reference trajectory that adeptly mitigates conflicts among safety conditions and reduce the risk while controlling the robot toward its destination without additional motion planning methods. In addition, robust bipedal locomotion is achieved by utilizing the Hybrid Linear Inverted Pendulum model, coupled with a disturbance observer addressing a disturbance from the physical interaction.
Dynamic Walking on Highly Underactuated Point Foot Humanoids: Closing the Loop between HZD and HLIP
Jun 19, 2024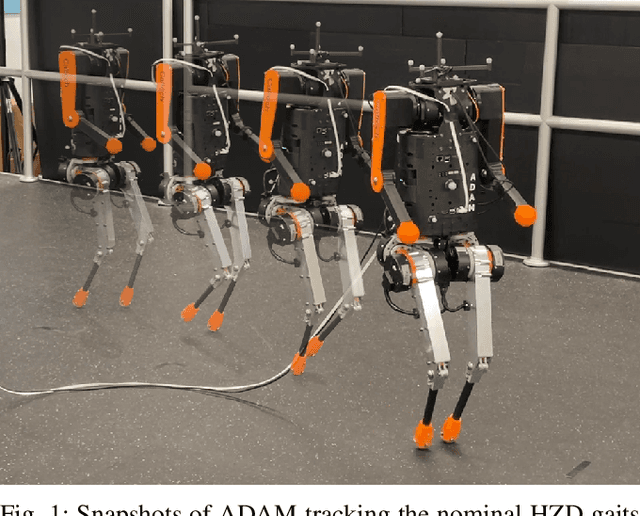
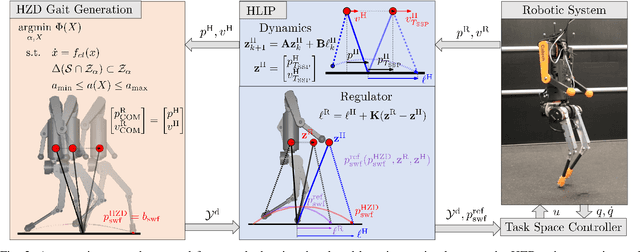
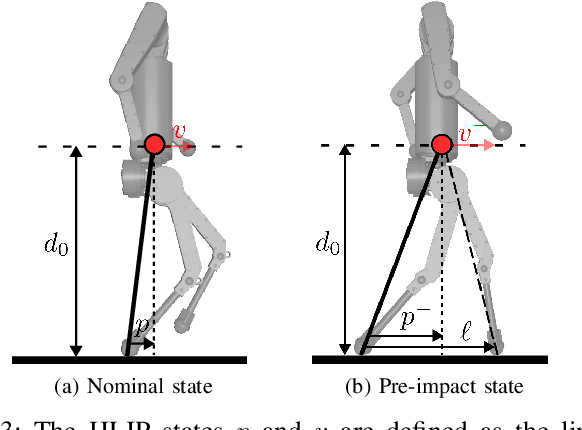
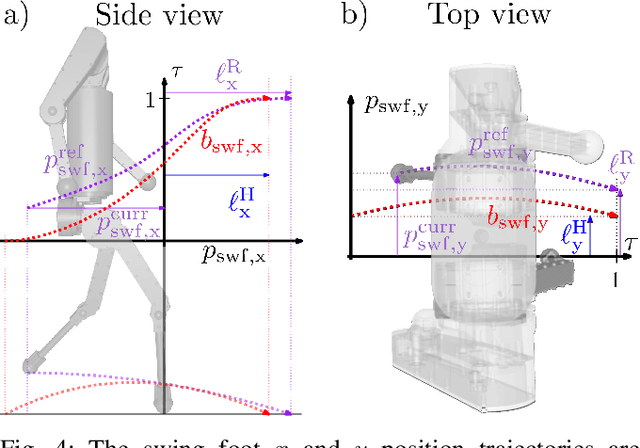
Realizing bipedal locomotion on humanoid robots with point feet is especially challenging due to their highly underactuated nature, high degrees of freedom, and hybrid dynamics resulting from impacts. With the goal of addressing this challenging problem, this paper develops a control framework for realizing dynamic locomotion and implements it on a novel point foot humanoid: ADAM. To this end, we close the loop between Hybrid Zero Dynamics (HZD) and Hybrid linear inverted pendulum (HLIP) based step length regulation. To leverage the full-order hybrid dynamics of the robot, walking gaits are first generated offline by utilizing HZD. These trajectories are stabilized online through the use of a HLIP based regulator. Finally, the planned trajectories are mapped into the full-order system using a task space controller incorporating inverse kinematics. The proposed method is verified through numerical simulations and hardware experiments on the humanoid robot ADAM marking the first humanoid point foot walking. Moreover, we experimentally demonstrate the robustness of the realized walking via the ability to track a desired reference speed, robustness to pushes, and locomotion on uneven terrain.
Safety-critical Autonomous Inspection of Distillation Columns using Quadrupedal Robots Equipped with Roller Arms
Apr 16, 2024This paper proposes a comprehensive framework designed for the autonomous inspection of complex environments, with a specific focus on multi-tiered settings such as distillation column trays. Leveraging quadruped robots equipped with roller arms, and through the use of onboard perception, we integrate essential motion components including: locomotion, safe and dynamic transitions between trays, and intermediate motions that bridge a variety of motion primitives. Given the slippery and confined nature of column trays, it is critical to ensure safety of the robot during inspection, therefore we employ a safety filter and footstep re-planning based upon control barrier function representations of the environment. Our framework integrates all system components into a state machine encoding the developed safety-critical planning and control elements to guarantee safety-critical autonomy, enabling autonomous and safe navigation and inspection of distillation columns. Experimental validation in an environment, consisting of industrial-grade chemical distillation trays, highlights the effectiveness of our multi-layered architecture.