 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredictive Control with Indirect Adaptive Laws for Payload Transportation by Quadrupedal Robots
Mar 09, 2026This paper formally develops a novel hierarchical planning and control framework for robust payload transportation by quadrupedal robots, integrating a model predictive control (MPC) algorithm with a gradient-descent-based adaptive updating law. At the framework's high level, an indirect adaptive law estimates the unknown parameters of the reduced-order (template) locomotion model under varying payloads. These estimated parameters feed into an MPC algorithm for real-time trajectory planning, incorporating a convex stability criterion within the MPC constraints to ensure the stability of the template model's estimation error. The optimal reduced-order trajectories generated by the high-level adaptive MPC (AMPC) are then passed to a low-level nonlinear whole-body controller (WBC) for tracking. Extensive numerical investigations validate the framework's capabilities, showcasing the robot's proficiency in transporting unmodeled, unknown static payloads up to 109% in experiments on flat terrains and 91% on rough experimental terrains. The robot also successfully manages dynamic payloads with 73% of its mass on rough terrains. Performance comparisons with a normal MPC and an L1 MPC indicate a significant improvement. Furthermore, comprehensive hardware experiments conducted in indoor and outdoor environments confirm the method's efficacy on rough terrains despite uncertainties such as payload variations, push disturbances, and obstacles.
* 8 pages, 6 figures. Published in IEEE Robotics and Automation Letters
Safety-Critical and Distributed Nonlinear Predictive Controllers for Teams of Quadrupedal Robots
Mar 18, 2025This paper presents a novel hierarchical, safety-critical control framework that integrates distributed nonlinear model predictive controllers (DNMPCs) with control barrier functions (CBFs) to enable cooperative locomotion of multi-agent quadrupedal robots in complex environments. While NMPC-based methods are widely adopted for enforcing safety constraints and navigating multi-robot systems (MRSs) through intricate environments, ensuring the safety of MRSs requires a formal definition grounded in the concept of invariant sets. CBFs, typically implemented via quadratic programs (QPs) at the planning layer, provide formal safety guarantees. However, their zero-control horizon limits their effectiveness for extended trajectory planning in inherently unstable, underactuated, and nonlinear legged robot models. Furthermore, the integration of CBFs into real-time NMPC for sophisticated MRSs, such as quadrupedal robot teams, remains underexplored. This paper develops computationally efficient, distributed NMPC algorithms that incorporate CBF-based collision safety guarantees within a consensus protocol, enabling longer planning horizons for safe cooperative locomotion under disturbances and rough terrain conditions. The optimal trajectories generated by the DNMPCs are tracked using full-order, nonlinear whole-body controllers at the low level. The proposed approach is validated through extensive numerical simulations with up to four Unitree A1 robots and hardware experiments involving two A1 robots subjected to external pushes, rough terrain, and uncertain obstacle information. Comparative analysis demonstrates that the proposed CBF-based DNMPCs achieve a 27.89% higher success rate than conventional NMPCs without CBF constraints.
Design and Development of a Locomotion Interface for Virtual Reality Lower-Body Haptic Interaction
Mar 03, 2025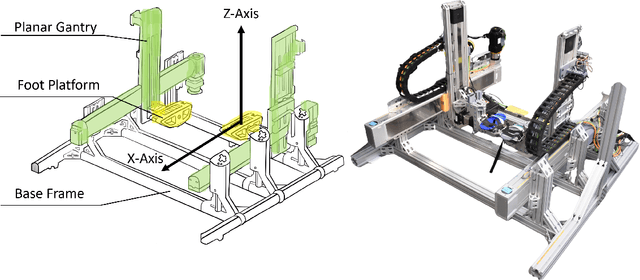
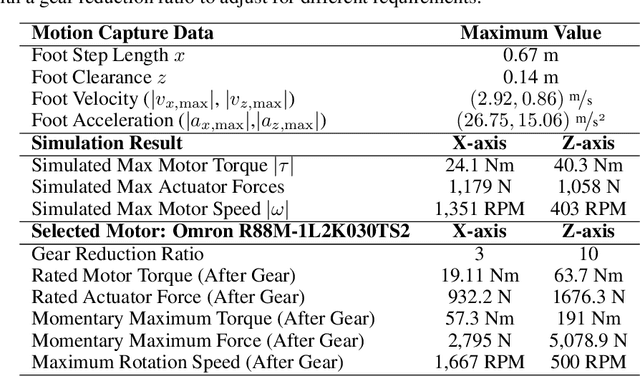
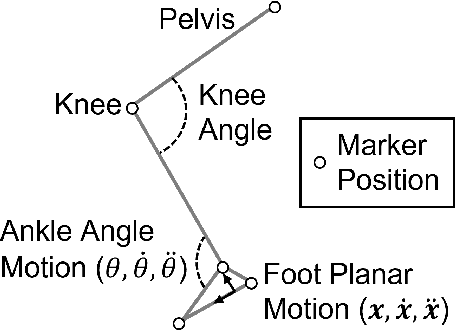
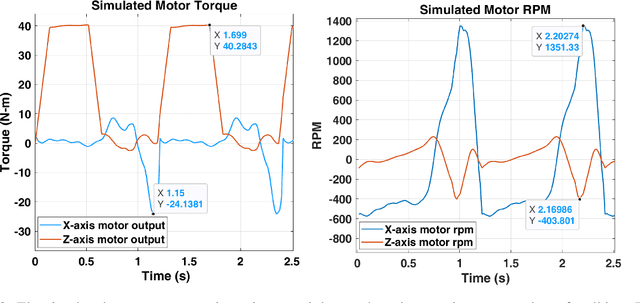
This work presents the design, build, control, and preliminary user data of a locomotion interface called ForceBot. It delivers lower-body haptic interaction in virtual reality (VR), enabling users to walk in VR while interacting with various simulated terrains. It utilizes two planar gantries to give each foot two degrees of freedom and passive heel-lifting motion. The design used motion capture data with dynamic simulation for ergonomic human-robot workspace and hardware selection. Its system framework uses open-source robotic software and pairs with a custom-built power delivery system that offers EtherCAT communication with a 1,000 Hz soft real-time computation rate. This system features an admittance controller to regulate physical human-robot interaction (pHRI) alongside a walking algorithm to generate walking motion and simulate virtual terrains. The system's performance is explored through three measurements that evaluate the relationship between user input force and output pHRI motion. Overall, this platform presents a unique approach by utilizing planar gantries to realize VR terrain interaction with an extensive workspace, reasonably compact footprint, and preliminary user data.
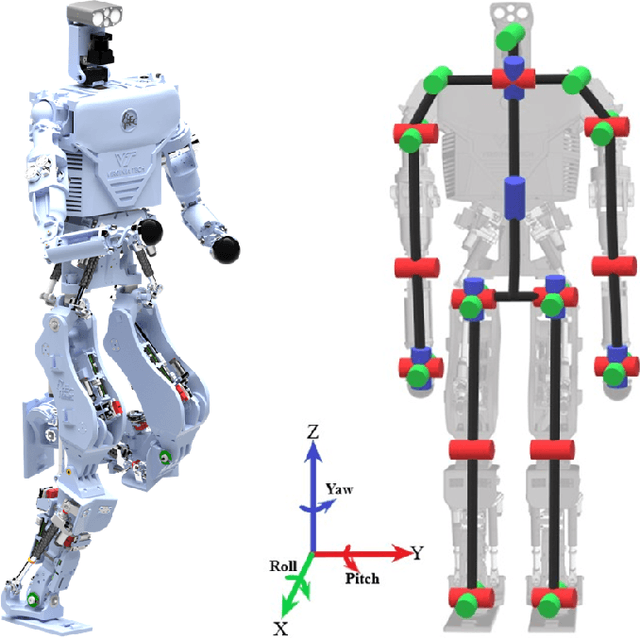
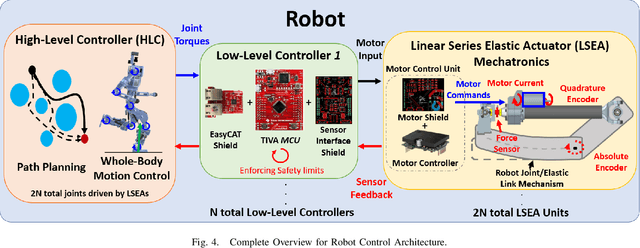
Joint-Space Control of a Structurally Elastic Humanoid Robot
Nov 18, 2024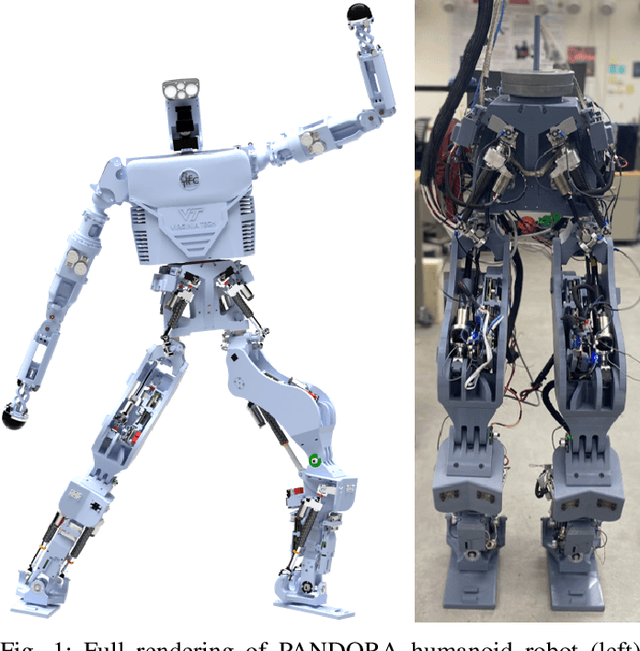
In this work, the joint-control strategy is presented for the humanoid robot, PANDORA, whose structural components are designed to be compliant. As opposed to contemporary approaches which design the elasticity internal to the actuator housing, PANDORA's structural components are designed to be compliant under load or, in other words, structurally elastic. To maintain the rapid design benefit of additive manufacturing, this joint control strategy employs a disturbance observer (DOB) modeled from an ideal elastic actuator. This robust controller treats the model variation from the structurally elastic components as a disturbance and eliminates the need for system identification of the 3D printed parts. This enables mechanical design engineers to iterate on the 3D printed linkages without requiring consistent tuning from the joint controller. Two sets of hardware results are presented for validating the controller. The first set of results are conducted on an ideal elastic actuator testbed that drives an unmodeled, 1 DoF weighted pendulum with a 10 kg mass. The results support the claim that the DOB can handle significant model variation. The second set of results is from a robust balancing experiment conducted on the 12 DoF lower body of PANDORA. The robot maintains balance while an operator applies 50 N pushes to the pelvis, where the actuator tracking results are presented for the left leg.
PANDORA: The Open-Source, Structurally Elastic Humanoid Robot
Jul 26, 2024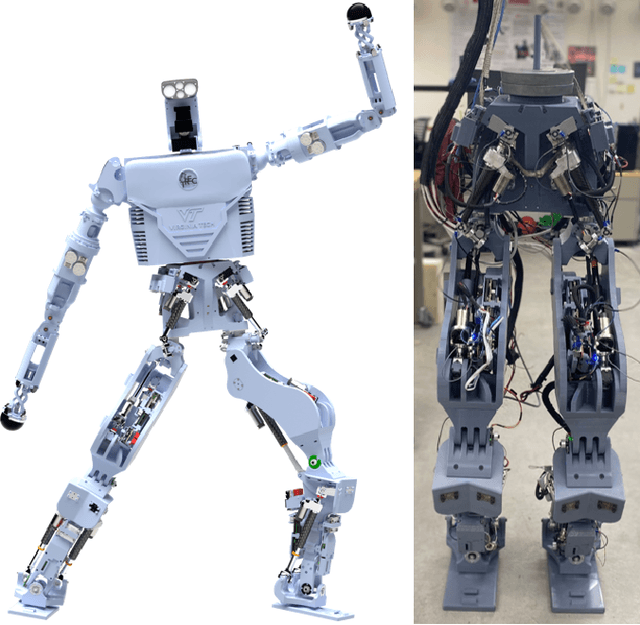
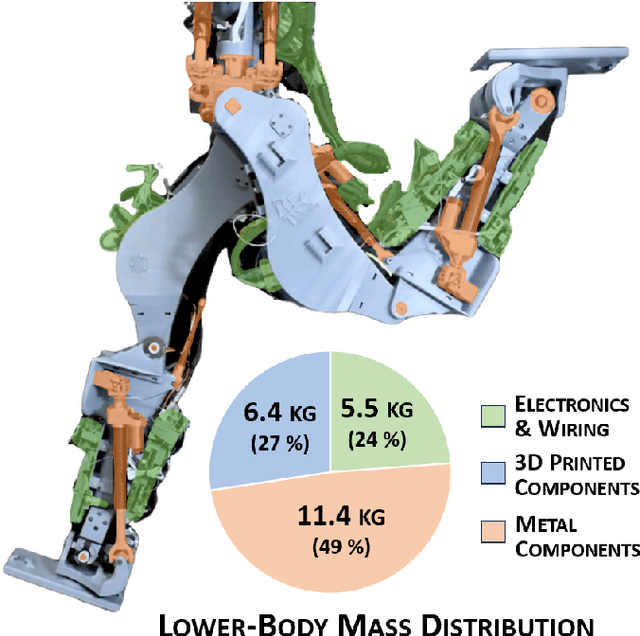
In this work, the novel, open-source humanoid robot, PANDORA, is presented where a majority of the structural elements are manufactured using 3D-printed compliant materials. As opposed to contemporary approaches that incorporate the elastic element into the actuator mechanisms, PANDORA is designed to be compliant under load, or in other words, structurally elastic. This design approach lowers manufacturing cost and time, design complexity, and assembly time while introducing controls challenges in state estimation, joint and whole-body control. This work features an in-depth description on the mechanical and electrical subsystems including details regarding additive manufacturing benefits and drawbacks, usage and placement of sensors, and networking between devices. In addition, the design of structural elastic components and their effects on overall performance from an estimation and control perspective are discussed. Finally, results are presented which demonstrate the robot completing a robust balancing objective in the presence of disturbances and stepping behaviors.
Real-Time Model-Free Deep Reinforcement Learning for Force Control of a Series Elastic Actuator
Apr 11, 2023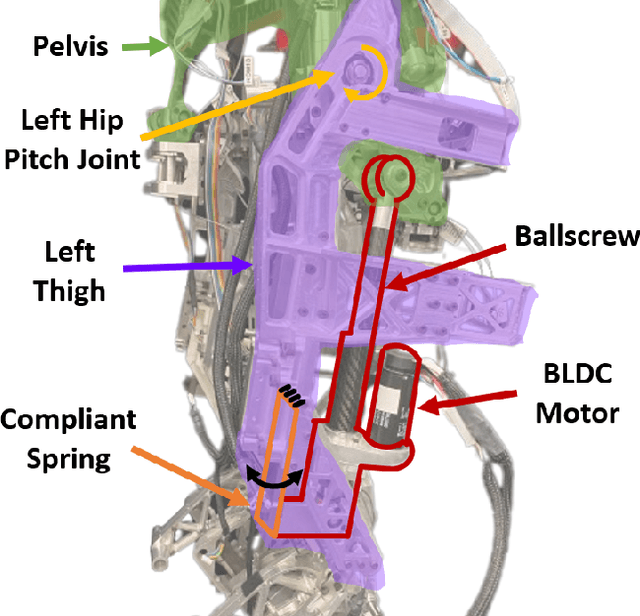
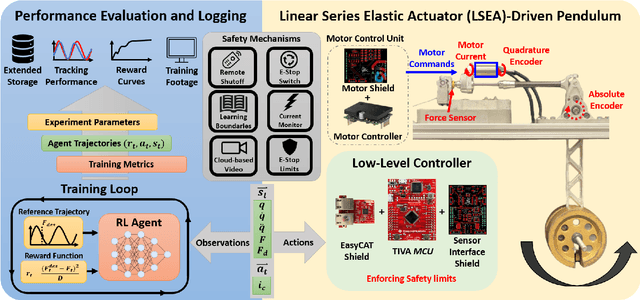
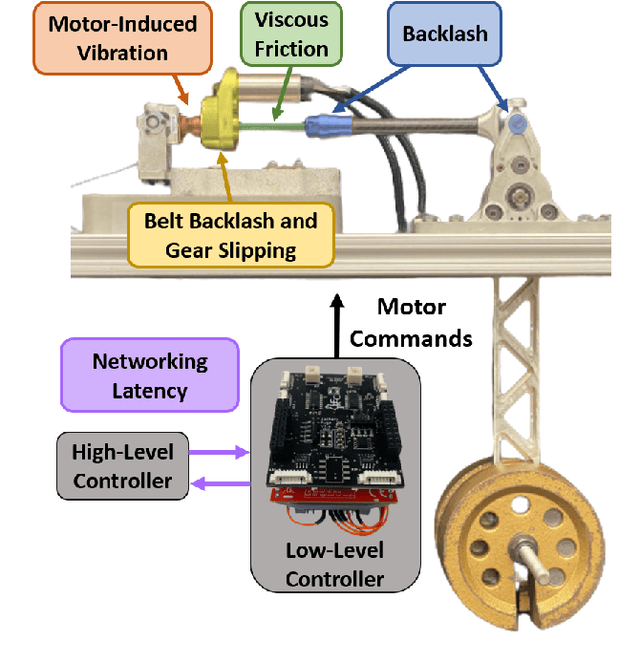
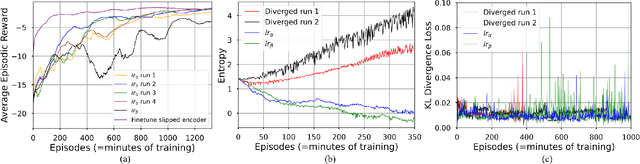
Many state-of-the art robotic applications utilize series elastic actuators (SEAs) with closed-loop force control to achieve complex tasks such as walking, lifting, and manipulation. Model-free PID control methods are more prone to instability due to nonlinearities in the SEA where cascaded model-based robust controllers can remove these effects to achieve stable force control. However, these model-based methods require detailed investigations to characterize the system accurately. Deep reinforcement learning (DRL) has proved to be an effective model-free method for continuous control tasks, where few works deal with hardware learning. This paper describes the training process of a DRL policy on hardware of an SEA pendulum system for tracking force control trajectories from 0.05 - 0.35 Hz at 50 N amplitude using the Proximal Policy Optimization (PPO) algorithm. Safety mechanisms are developed and utilized for training the policy for 12 hours (overnight) without an operator present within the full 21 hours training period. The tracking performance is evaluated showing improvements of $25$ N in mean absolute error when comparing the first 18 min. of training to the full 21 hours for a 50 N amplitude, 0.1 Hz sinusoid desired force trajectory. Finally, the DRL policy exhibits better tracking and stability margins when compared to a model-free PID controller for a 50 N chirp force trajectory.
Grasp Control of a Cable-Driven Robotic Hand Using a PVDF Slip Detection Sensor
Feb 12, 2022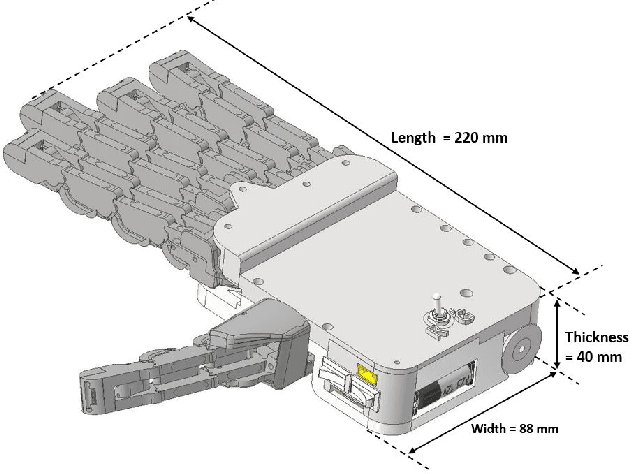
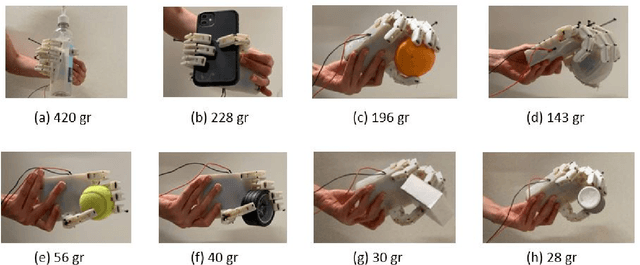
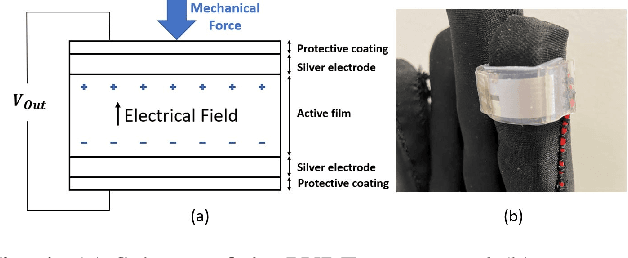
Detecting and preventing slip is a major challenge in robotic hand operation, underpinning the robot's ability to perform safe and reliable grasps. Using the robotic hand design from the authors' earlier work, a sensing and control strategy is proposed here to prevent object slippage. The robotic hand is cable-driven, single-actuated, has five fingers, and is capable of replicating most human hand motions. The slip sensing approach utilizes a piezoelectric vibration sensor, namely, polyvinylidene fluoride (PVDF), which is a flexible, thin, cheap, and highly sensitive material. The power of the filtered PVDF signal is shown to exhibit identifiable signatures during slip, thus providing a suitable slip detection mechanism. Using the PVDF feedback, an integral controller is implemented to prevent the grasped object from falling and ensure a safe, powerful, and reliable grasp. The extension movement of the robotic hand is controlled using a bend sensor, through a proportional-integral (PI) controller. The robotic hand weights 338 gr. The functionality and robustness of the proposed slip-detection sensory system and control logic implementation are evaluated through experiments.
Capture Point Trajectories for Reduced Knee Bend using Step Time Optimization
Dec 27, 2017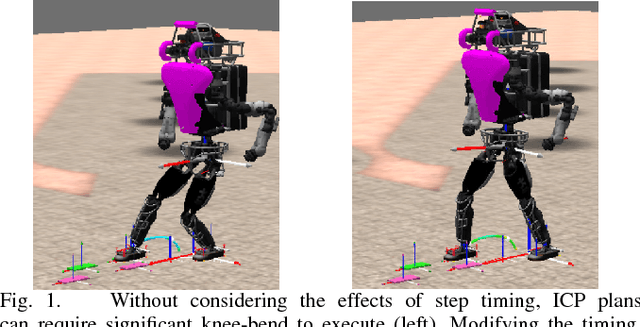
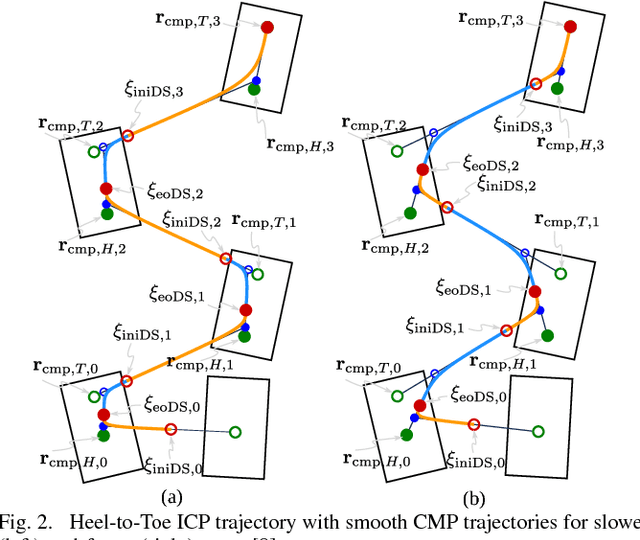
Traditional force-controlled bipedal walking utilizes highly bent knees, resulting in high torques as well as inefficient, and unnatural motions. Even with advanced planning of center of mass height trajectories, significant amounts of knee-bend can be required due to arbitrarily chosen step timing. In this work, we present a method that examines the effects of adjusting the step timing to produce plans that only require a specified amount of knee bend to execute. We define a quadratic program that optimizes the step timings and is executed using a simple iterative feedback approach to account for higher order terms. We then illustrate the effectiveness of this algorithm by comparing the walking gait of the simulated Atlas humanoid with and without the algorithm, showing that the algorithm significantly reduces the required knee bend for execution. We aim to later use this approach to achieve natural, efficient walking motions on humanoid robot platforms.
Walking Stabilization Using Step Timing and Location Adjustment on the Humanoid Robot, Atlas
Dec 27, 2017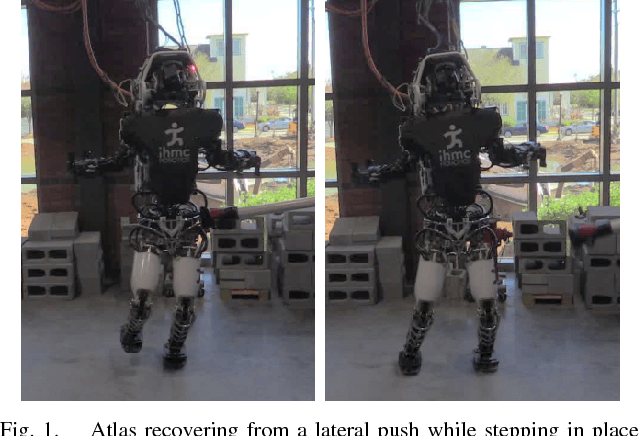
While humans are highly capable of recovering from external disturbances and uncertainties that result in large tracking errors, humanoid robots have yet to reliably mimic this level of robustness. Essential to this is the ability to combine traditional "ankle strategy" balancing with step timing and location adjustment techniques. In doing so, the robot is able to step quickly to the necessary location to continue walking. In this work, we present both a new swing speed up algorithm to adjust the step timing, allowing the robot to set the foot down more quickly to recover from errors in the direction of the current capture point dynamics, and a new algorithm to adjust the desired footstep, expanding the base of support to utilize the center of pressure (CoP)-based ankle strategy for balance. We then utilize the desired centroidal moment pivot (CMP) to calculate the momentum rate of change for our inverse-dynamics based whole-body controller. We present simulation and experimental results using this work, and discuss performance limitations and potential improvements.
Straight-Leg Walking Through Underconstrained Whole-Body Control
Sep 12, 2017
We present an approach for achieving a natural, efficient gait on bipedal robots using straightened legs and toe-off. Our algorithm avoids complex height planning by allowing a whole-body controller to determine the straightest possible leg configuration at run-time. The controller solutions are biased towards a straight leg configuration by projecting leg joint angle objectives into the null-space of the other quadratic program motion objectives. To allow the legs to remain straight throughout the gait, toe-off was utilized to increase the kinematic reachability of the legs. The toe-off motion is achieved through underconstraining the foot position, allowing it to emerge naturally. We applied this approach of under-specifying the motion objectives to the Atlas humanoid, allowing it to walk over a variety of terrain. We present both experimental and simulation results and discuss performance limitations and potential improvements.