 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Development of a Locomotion Interface for Virtual Reality Lower-Body Haptic Interaction
Mar 03, 2025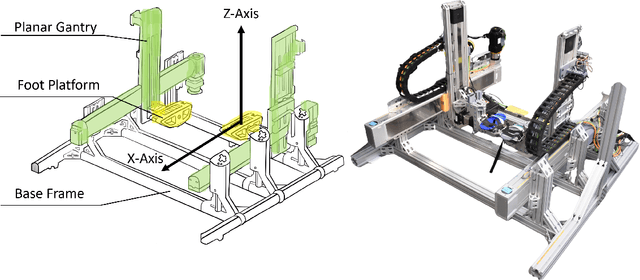
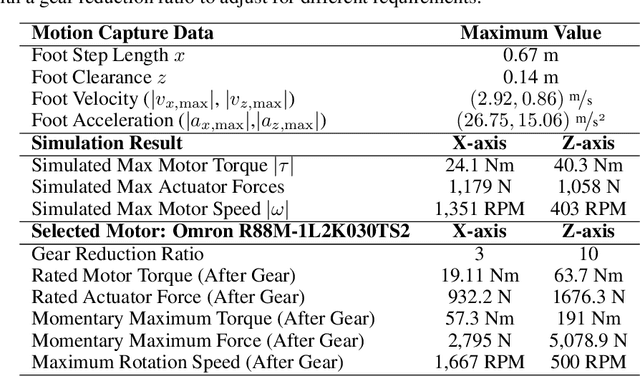
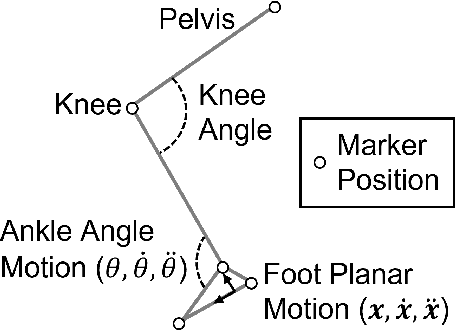
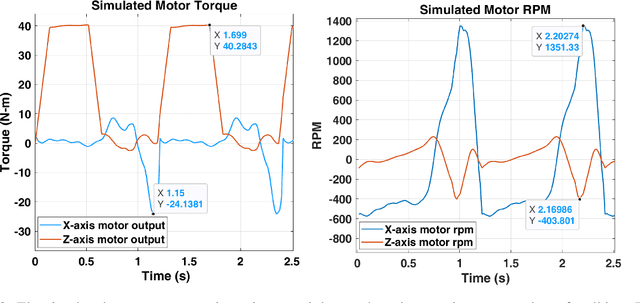
This work presents the design, build, control, and preliminary user data of a locomotion interface called ForceBot. It delivers lower-body haptic interaction in virtual reality (VR), enabling users to walk in VR while interacting with various simulated terrains. It utilizes two planar gantries to give each foot two degrees of freedom and passive heel-lifting motion. The design used motion capture data with dynamic simulation for ergonomic human-robot workspace and hardware selection. Its system framework uses open-source robotic software and pairs with a custom-built power delivery system that offers EtherCAT communication with a 1,000 Hz soft real-time computation rate. This system features an admittance controller to regulate physical human-robot interaction (pHRI) alongside a walking algorithm to generate walking motion and simulate virtual terrains. The system's performance is explored through three measurements that evaluate the relationship between user input force and output pHRI motion. Overall, this platform presents a unique approach by utilizing planar gantries to realize VR terrain interaction with an extensive workspace, reasonably compact footprint, and preliminary user data.