 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Development of a Locomotion Interface for Virtual Reality Lower-Body Haptic Interaction
Mar 03, 2025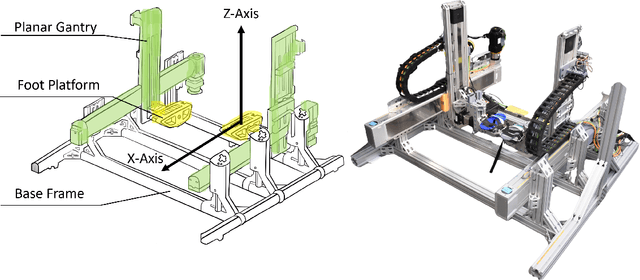
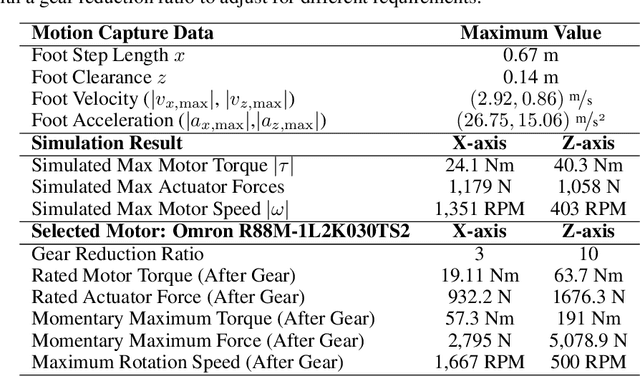
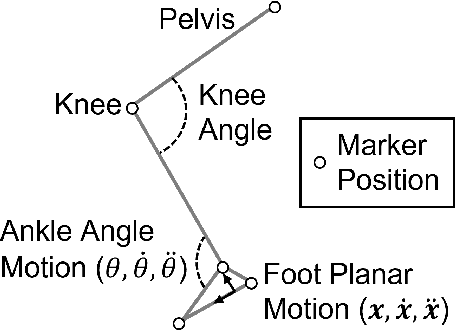
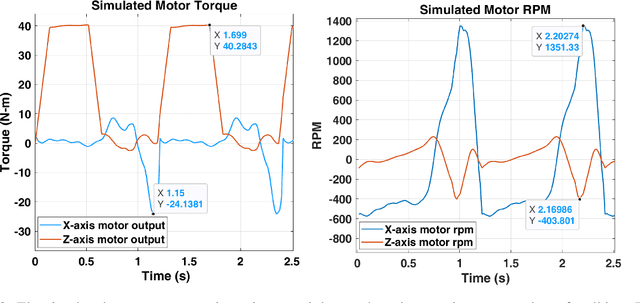
This work presents the design, build, control, and preliminary user data of a locomotion interface called ForceBot. It delivers lower-body haptic interaction in virtual reality (VR), enabling users to walk in VR while interacting with various simulated terrains. It utilizes two planar gantries to give each foot two degrees of freedom and passive heel-lifting motion. The design used motion capture data with dynamic simulation for ergonomic human-robot workspace and hardware selection. Its system framework uses open-source robotic software and pairs with a custom-built power delivery system that offers EtherCAT communication with a 1,000 Hz soft real-time computation rate. This system features an admittance controller to regulate physical human-robot interaction (pHRI) alongside a walking algorithm to generate walking motion and simulate virtual terrains. The system's performance is explored through three measurements that evaluate the relationship between user input force and output pHRI motion. Overall, this platform presents a unique approach by utilizing planar gantries to realize VR terrain interaction with an extensive workspace, reasonably compact footprint, and preliminary user data.
Joint-Space Control of a Structurally Elastic Humanoid Robot
Nov 18, 2024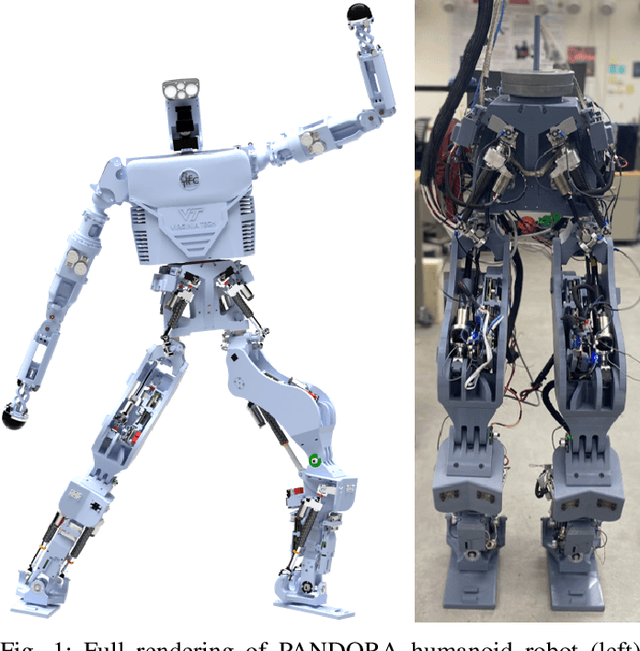
In this work, the joint-control strategy is presented for the humanoid robot, PANDORA, whose structural components are designed to be compliant. As opposed to contemporary approaches which design the elasticity internal to the actuator housing, PANDORA's structural components are designed to be compliant under load or, in other words, structurally elastic. To maintain the rapid design benefit of additive manufacturing, this joint control strategy employs a disturbance observer (DOB) modeled from an ideal elastic actuator. This robust controller treats the model variation from the structurally elastic components as a disturbance and eliminates the need for system identification of the 3D printed parts. This enables mechanical design engineers to iterate on the 3D printed linkages without requiring consistent tuning from the joint controller. Two sets of hardware results are presented for validating the controller. The first set of results are conducted on an ideal elastic actuator testbed that drives an unmodeled, 1 DoF weighted pendulum with a 10 kg mass. The results support the claim that the DOB can handle significant model variation. The second set of results is from a robust balancing experiment conducted on the 12 DoF lower body of PANDORA. The robot maintains balance while an operator applies 50 N pushes to the pelvis, where the actuator tracking results are presented for the left leg.