 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Nonlinear MPC Framework for Loco-Manipulation of Quadrupedal Robots with Non-Negligible Manipulator Dynamics
Jul 29, 2025Model predictive control (MPC) combined with reduced-order template models has emerged as a powerful tool for trajectory optimization in dynamic legged locomotion. However, loco-manipulation tasks performed by legged robots introduce additional complexity, necessitating computationally efficient MPC algorithms capable of handling high-degree-of-freedom (DoF) models. This letter presents a computationally efficient nonlinear MPC (NMPC) framework tailored for loco-manipulation tasks of quadrupedal robots equipped with robotic manipulators whose dynamics are non-negligible relative to those of the quadruped. The proposed framework adopts a decomposition strategy that couples locomotion template models -- such as the single rigid body (SRB) model -- with a full-order dynamic model of the robotic manipulator for torque-level control. This decomposition enables efficient real-time solution of the NMPC problem in a receding horizon fashion at 60 Hz. The optimal state and input trajectories generated by the NMPC for locomotion are tracked by a low-level nonlinear whole-body controller (WBC) running at 500 Hz, while the optimal torque commands for the manipulator are directly applied. The layered control architecture is validated through extensive numerical simulations and hardware experiments on a 15-kg Unitree Go2 quadrupedal robot augmented with a 4.4-kg 4-DoF Kinova arm. Given that the Kinova arm dynamics are non-negligible relative to the Go2 base, the proposed NMPC framework demonstrates robust stability in performing diverse loco-manipulation tasks, effectively handling external disturbances, payload variations, and uneven terrain.
Safety-Critical and Distributed Nonlinear Predictive Controllers for Teams of Quadrupedal Robots
Mar 18, 2025This paper presents a novel hierarchical, safety-critical control framework that integrates distributed nonlinear model predictive controllers (DNMPCs) with control barrier functions (CBFs) to enable cooperative locomotion of multi-agent quadrupedal robots in complex environments. While NMPC-based methods are widely adopted for enforcing safety constraints and navigating multi-robot systems (MRSs) through intricate environments, ensuring the safety of MRSs requires a formal definition grounded in the concept of invariant sets. CBFs, typically implemented via quadratic programs (QPs) at the planning layer, provide formal safety guarantees. However, their zero-control horizon limits their effectiveness for extended trajectory planning in inherently unstable, underactuated, and nonlinear legged robot models. Furthermore, the integration of CBFs into real-time NMPC for sophisticated MRSs, such as quadrupedal robot teams, remains underexplored. This paper develops computationally efficient, distributed NMPC algorithms that incorporate CBF-based collision safety guarantees within a consensus protocol, enabling longer planning horizons for safe cooperative locomotion under disturbances and rough terrain conditions. The optimal trajectories generated by the DNMPCs are tracked using full-order, nonlinear whole-body controllers at the low level. The proposed approach is validated through extensive numerical simulations with up to four Unitree A1 robots and hardware experiments involving two A1 robots subjected to external pushes, rough terrain, and uncertain obstacle information. Comparative analysis demonstrates that the proposed CBF-based DNMPCs achieve a 27.89% higher success rate than conventional NMPCs without CBF constraints.
Data-Driven Predictive Control for Robust Exoskeleton Locomotion
Mar 23, 2024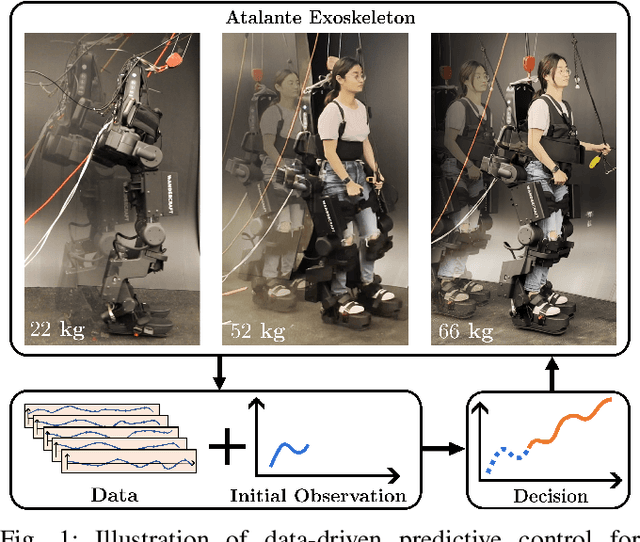
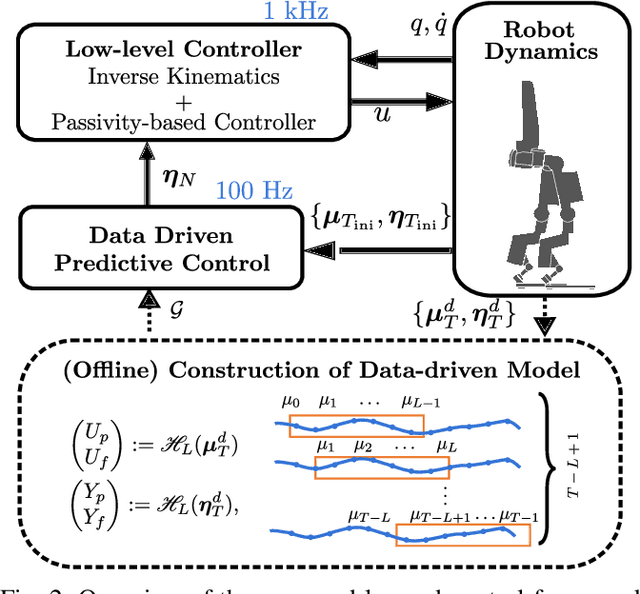
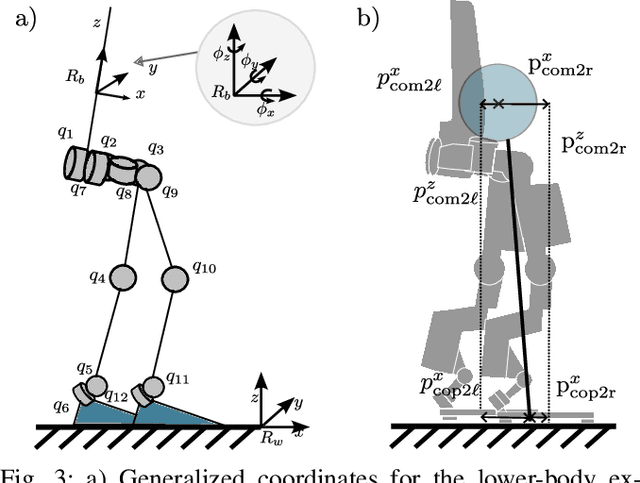
Exoskeleton locomotion must be robust while being adaptive to different users with and without payloads. To address these challenges, this work introduces a data-driven predictive control (DDPC) framework to synthesize walking gaits for lower-body exoskeletons, employing Hankel matrices and a state transition matrix for its data-driven model. The proposed approach leverages DDPC through a multi-layer architecture. At the top layer, DDPC serves as a planner employing Hankel matrices and a state transition matrix to generate a data-driven model that can learn and adapt to varying users and payloads. At the lower layer, our method incorporates inverse kinematics and passivity-based control to map the planned trajectory from DDPC into the full-order states of the lower-body exoskeleton. We validate the effectiveness of this approach through numerical simulations and hardware experiments conducted on the Atalante lower-body exoskeleton with different payloads. Moreover, we conducted a comparative analysis against the model predictive control (MPC) framework based on the reduced-order linear inverted pendulum (LIP) model. Through this comparison, the paper demonstrates that DDPC enables robust bipedal walking at various velocities while accounting for model uncertainties and unknown perturbations.
Distributed Data-Driven Predictive Control for Multi-Agent Collaborative Legged Locomotion
Nov 13, 2022



The aim of this work is to define a planner that enables robust legged locomotion for complex multi-agent systems consisting of several holonomically constrained quadrupeds. To this end, we employ a methodology based on behavioral systems theory to model the sophisticated and high-dimensional structure induced by the holonomic constraints. The resulting model is then used in tandem with distributed control techniques such that the computational burden is shared across agents while the coupling between agents is preserved. Finally, this distributed model is framed in the context of a predictive controller, resulting in a robustly stable method for trajectory planning. This methodology is tested in simulation with up to five agents and is further experimentally validated on three A1 quadrupedal robots subject to various uncertainties, including payloads, rough terrain, and push disturbances.
Layered Control for Cooperative Locomotion of Two Quadrupedal Robots: Centralized and Distributed Approaches
Nov 13, 2022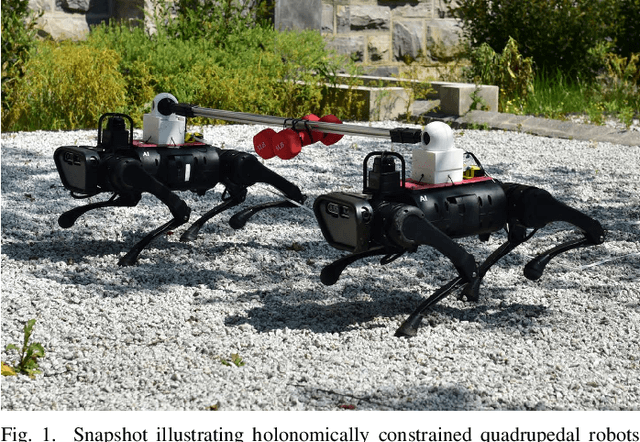
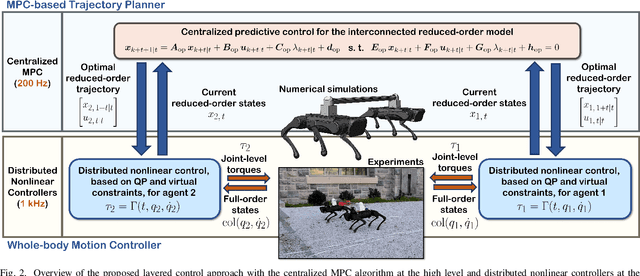
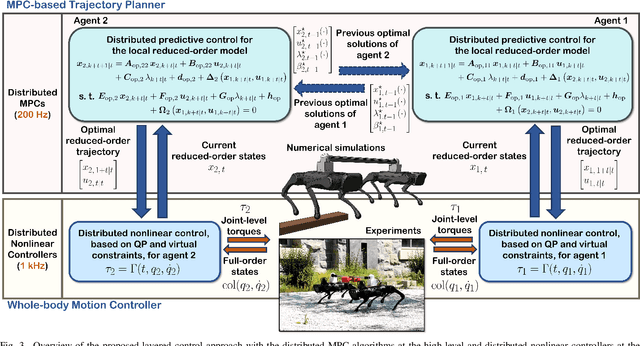
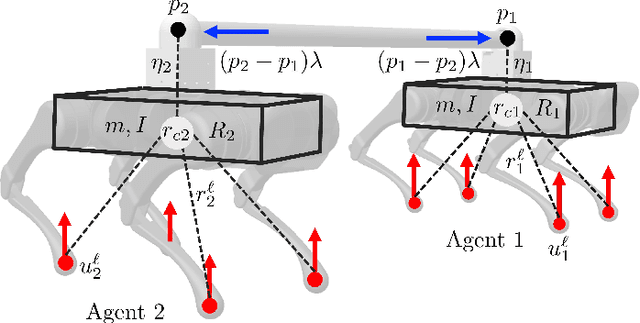
This paper presents a layered control approach for real-time trajectory planning and control of robust cooperative locomotion by two holonomically constrained quadrupedal robots. A novel interconnected network of reduced-order models, based on the single rigid body (SRB) dynamics, is developed for trajectory planning purposes. At the higher level of the control architecture, two different model predictive control (MPC) algorithms are proposed to address the optimal control problem of the interconnected SRB dynamics: centralized and distributed MPCs. The distributed MPC assumes two local quadratic programs that share their optimal solutions according to a one-step communication delay and an agreement protocol. At the lower level of the control scheme, distributed nonlinear controllers are developed to impose the full-order dynamics to track the prescribed reduced-order trajectories generated by MPCs. The effectiveness of the control approach is verified with extensive numerical simulations and experiments for the robust and cooperative locomotion of two holonomically constrained A1 robots with different payloads on variable terrains and in the presence of disturbances. It is shown that the distributed MPC has a performance similar to that of the centralized MPC, while the computation time is reduced significantly.
Quadrupedal Locomotion via Event-Based Predictive Control and QP-Based Virtual Constraints
Apr 15, 2020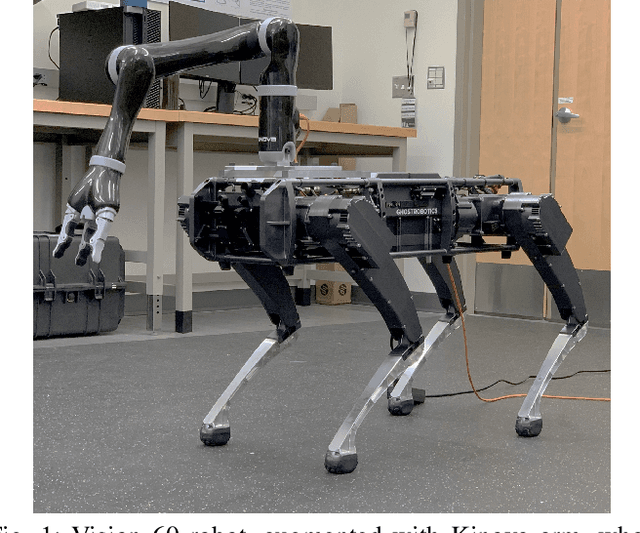
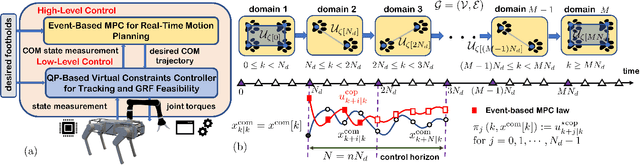
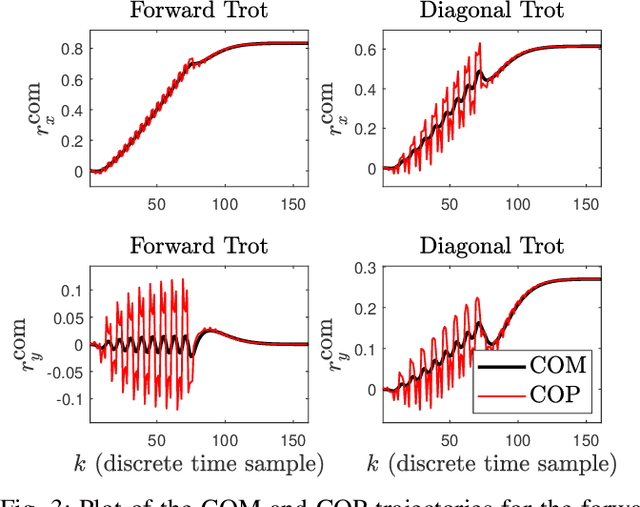
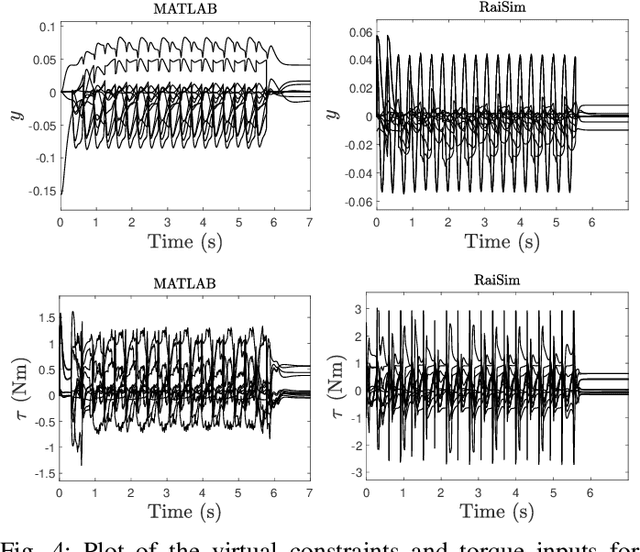
This paper aims to develop a hierarchical nonlinear control algorithm, based on model predictive control (MPC), quadratic programming (QP), and virtual constraints, to generate and stabilize locomotion patterns in a real-time manner for dynamical models of quadrupedal robots. The higher level of the proposed control scheme is developed based on an event-based MPC that computes the optimal center of mass (COM) trajectories for a reduced-order linear inverted pendulum (LIP) model subject to the feasibility of the net ground reaction force (GRF). The asymptotic stability of the desired target point for the reduced-order model under the event-based MPC approach is investigated. It is shown that the event-based nature of the proposed MPC approach can significantly reduce the computational burden associated with the real-time implementation of MPC techniques. To bridge the gap between reduced- and full-order models, QP-based virtual constraint controllers are developed at the lower level of the proposed control scheme to impose the full-order dynamics to track the optimal trajectories while having all individual GRFs in the friction cone. The analytical results of the paper are numerically confirmed on full-order simulation models of a 22 degree of freedom quadrupedal robot, Vision 60, that is augmented by a robotic manipulator. The paper numerically investigates the robustness of the proposed control algorithm against different contact models.
First Steps Towards Full Model Based Motion Planning and Control of Quadrupeds: A Hybrid Zero Dynamics Approach
Sep 17, 2019
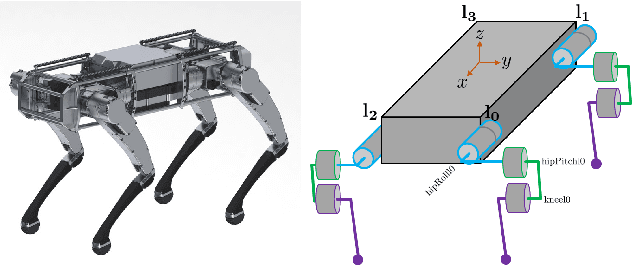
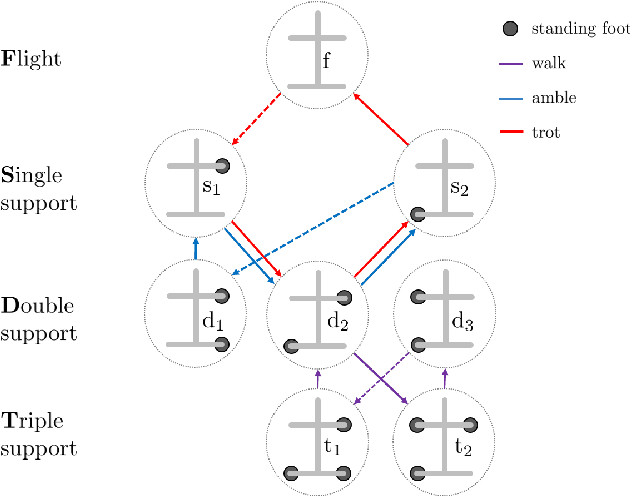

The hybrid zero dynamics (HZD) approach has become a powerful tool for the gait planning and control of bipedal robots. This paper aims to extend the HZD methods to address walking, ambling and trotting behaviors on a quadrupedal robot. We present a framework that systematically generates a wide range of optimal trajectories and then provably stabilizes them for the full-order, nonlinear and hybrid dynamical models of quadrupedal locomotion. The gait planning is addressed through a scalable nonlinear programming using direct collocation and HZD. The controller synthesis for the exponential stability is then achieved through the Poincar\'e sections analysis. In particular, we employ an iterative optimization algorithm involving linear and bilinear matrix inequalities (LMIs and BMIs) to design HZD-based controllers that guarantee the exponential stability of the fixed points for the Poincar\'e return map. The power of the framework is demonstrated through gait generation and HZD-based controller synthesis for an advanced quadruped robot, ---Vision 60, with 36 state variables and 12 control inputs. The numerical simulations as well as real world experiments confirm the validity of the proposed framework.