 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrid Data-Driven Predictive Control for Robust and Reactive Exoskeleton Locomotion Synthesis
Aug 14, 2025Robust bipedal locomotion in exoskeletons requires the ability to dynamically react to changes in the environment in real time. This paper introduces the hybrid data-driven predictive control (HDDPC) framework, an extension of the data-enabled predictive control, that addresses these challenges by simultaneously planning foot contact schedules and continuous domain trajectories. The proposed framework utilizes a Hankel matrix-based representation to model system dynamics, incorporating step-to-step (S2S) transitions to enhance adaptability in dynamic environments. By integrating contact scheduling with trajectory planning, the framework offers an efficient, unified solution for locomotion motion synthesis that enables robust and reactive walking through online replanning. We validate the approach on the Atalante exoskeleton, demonstrating improved robustness and adaptability.
Preferential Multi-Objective Bayesian Optimization
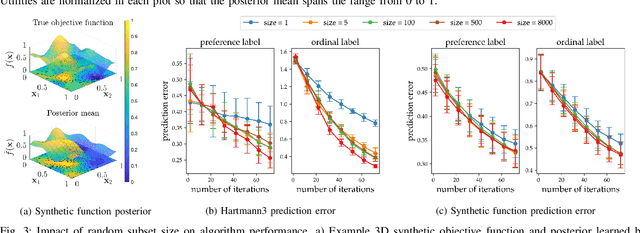
Jun 20, 2024Preferential Bayesian optimization (PBO) is a framework for optimizing a decision-maker's latent preferences over available design choices. While preferences often involve multiple conflicting objectives, existing work in PBO assumes that preferences can be encoded by a single objective function. For example, in robotic assistive devices, technicians often attempt to maximize user comfort while simultaneously minimizing mechanical energy consumption for longer battery life. Similarly, in autonomous driving policy design, decision-makers wish to understand the trade-offs between multiple safety and performance attributes before committing to a policy. To address this gap, we propose the first framework for PBO with multiple objectives. Within this framework, we present dueling scalarized Thompson sampling (DSTS), a multi-objective generalization of the popular dueling Thompson algorithm, which may be of interest beyond the PBO setting. We evaluate DSTS across four synthetic test functions and two simulated exoskeleton personalization and driving policy design tasks, showing that it outperforms several benchmarks. Finally, we prove that DSTS is asymptotically consistent. As a direct consequence, this result provides, to our knowledge, the first convergence guarantee for dueling Thompson sampling in the PBO setting.
Dynamic Walking on Highly Underactuated Point Foot Humanoids: Closing the Loop between HZD and HLIP
Jun 19, 2024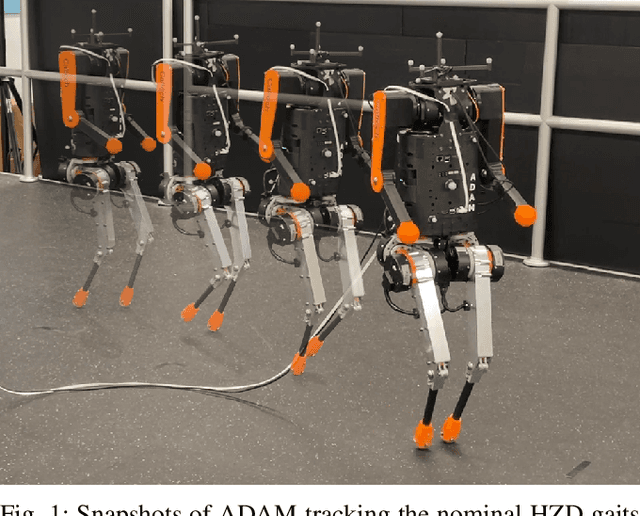
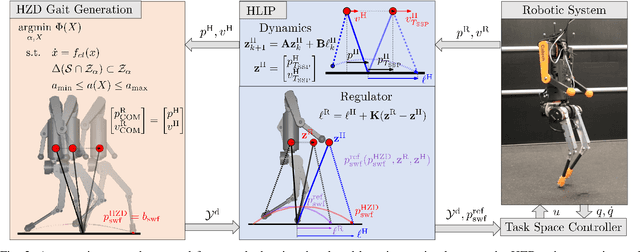
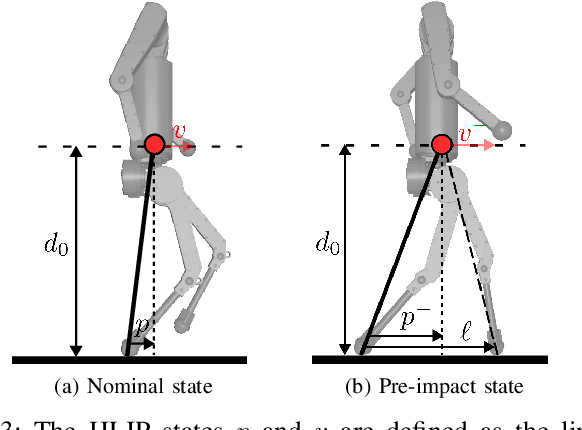
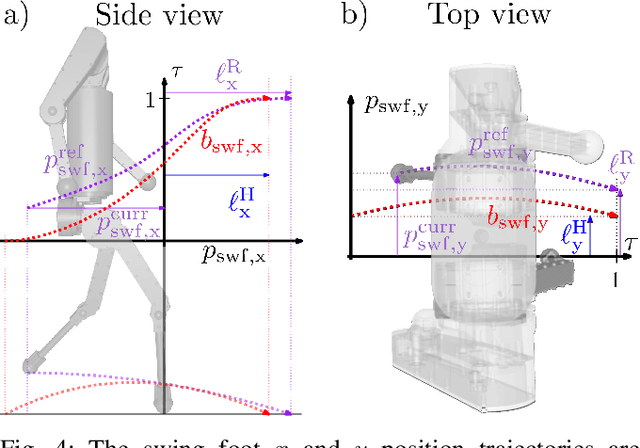
Realizing bipedal locomotion on humanoid robots with point feet is especially challenging due to their highly underactuated nature, high degrees of freedom, and hybrid dynamics resulting from impacts. With the goal of addressing this challenging problem, this paper develops a control framework for realizing dynamic locomotion and implements it on a novel point foot humanoid: ADAM. To this end, we close the loop between Hybrid Zero Dynamics (HZD) and Hybrid linear inverted pendulum (HLIP) based step length regulation. To leverage the full-order hybrid dynamics of the robot, walking gaits are first generated offline by utilizing HZD. These trajectories are stabilized online through the use of a HLIP based regulator. Finally, the planned trajectories are mapped into the full-order system using a task space controller incorporating inverse kinematics. The proposed method is verified through numerical simulations and hardware experiments on the humanoid robot ADAM marking the first humanoid point foot walking. Moreover, we experimentally demonstrate the robustness of the realized walking via the ability to track a desired reference speed, robustness to pushes, and locomotion on uneven terrain.
Data-Driven Predictive Control for Robust Exoskeleton Locomotion
Mar 23, 2024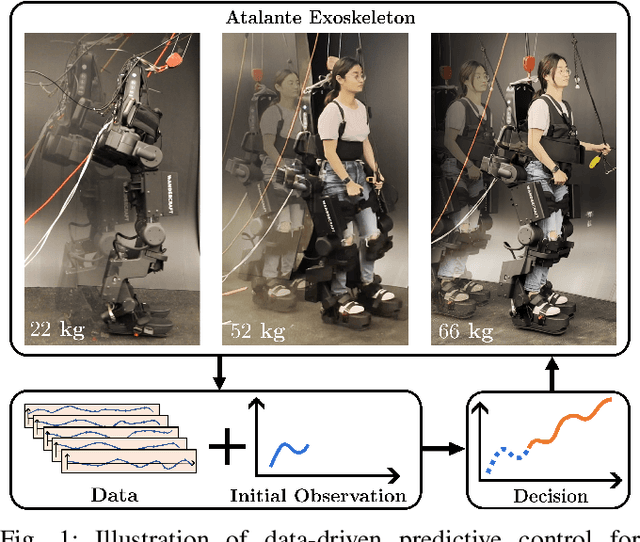
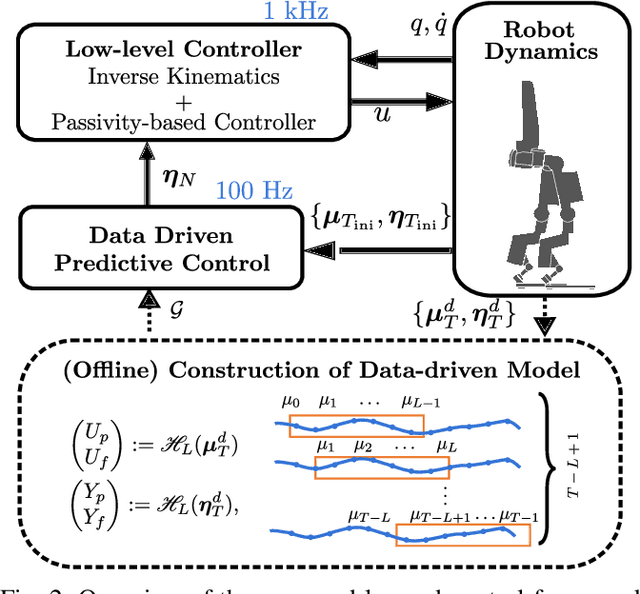
Exoskeleton locomotion must be robust while being adaptive to different users with and without payloads. To address these challenges, this work introduces a data-driven predictive control (DDPC) framework to synthesize walking gaits for lower-body exoskeletons, employing Hankel matrices and a state transition matrix for its data-driven model. The proposed approach leverages DDPC through a multi-layer architecture. At the top layer, DDPC serves as a planner employing Hankel matrices and a state transition matrix to generate a data-driven model that can learn and adapt to varying users and payloads. At the lower layer, our method incorporates inverse kinematics and passivity-based control to map the planned trajectory from DDPC into the full-order states of the lower-body exoskeleton. We validate the effectiveness of this approach through numerical simulations and hardware experiments conducted on the Atalante lower-body exoskeleton with different payloads. Moreover, we conducted a comparative analysis against the model predictive control (MPC) framework based on the reduced-order linear inverted pendulum (LIP) model. Through this comparison, the paper demonstrates that DDPC enables robust bipedal walking at various velocities while accounting for model uncertainties and unknown perturbations.
Synthesizing Robust Walking Gaits via Discrete-Time Barrier Functions with Application to Multi-Contact Exoskeleton Locomotion
Oct 09, 2023



Successfully achieving bipedal locomotion remains challenging due to real-world factors such as model uncertainty, random disturbances, and imperfect state estimation. In this work, we propose the use of discrete-time barrier functions to certify hybrid forward invariance of reduced step-to-step dynamics. The size of these invariant sets can then be used as a metric for locomotive robustness. We demonstrate an application of this metric towards synthesizing robust nominal walking gaits using a simulation-in-the-loop approach. This procedure produces reference motions with step-to-step dynamics that are maximally forward-invariant with respect to the reduced representation of choice. The results demonstrate robust locomotion for both flat-foot walking and multi-contact walking on the Atalante lower-body exoskeleton.
POLAR: Preference Optimization and Learning Algorithms for Robotics
Aug 08, 2022

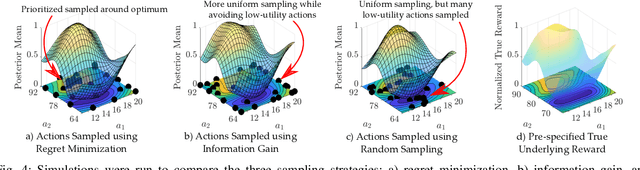
Parameter tuning for robotic systems is a time-consuming and challenging task that often relies on domain expertise of the human operator. Moreover, existing learning methods are not well suited for parameter tuning for many reasons including: the absence of a clear numerical metric for `good robotic behavior'; limited data due to the reliance on real-world experimental data; and the large search space of parameter combinations. In this work, we present an open-source MATLAB Preference Optimization and Learning Algorithms for Robotics toolbox (POLAR) for systematically exploring high-dimensional parameter spaces using human-in-the-loop preference-based learning. This aim of this toolbox is to systematically and efficiently accomplish one of two objectives: 1) to optimize robotic behaviors for human operator preference; 2) to learn the operator's underlying preference landscape to better understand the relationship between adjustable parameters and operator preference. The POLAR toolbox achieves these objectives using only subjective feedback mechanisms (pairwise preferences, coactive feedback, and ordinal labels) to infer a Bayesian posterior over the underlying reward function dictating the user's preferences. We demonstrate the performance of the toolbox in simulation and present various applications of human-in-the-loop preference-based learning.
Safety-Aware Preference-Based Learning for Safety-Critical Control
Dec 15, 2021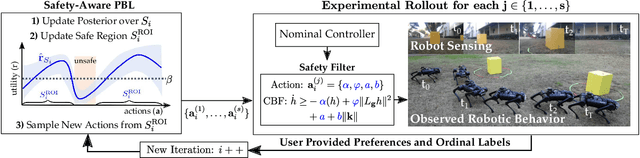
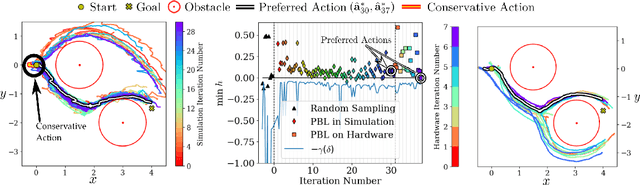
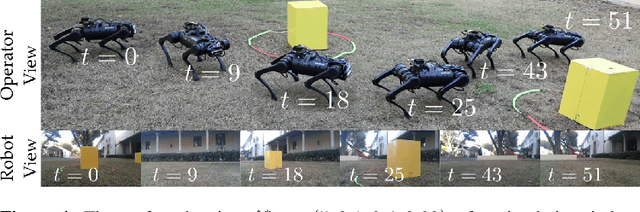
Bringing dynamic robots into the wild requires a tenuous balance between performance and safety. Yet controllers designed to provide robust safety guarantees often result in conservative behavior, and tuning these controllers to find the ideal trade-off between performance and safety typically requires domain expertise or a carefully constructed reward function. This work presents a design paradigm for systematically achieving behaviors that balance performance and robust safety by integrating safety-aware Preference-Based Learning (PBL) with Control Barrier Functions (CBFs). Fusing these concepts -- safety-aware learning and safety-critical control -- gives a robust means to achieve safe behaviors on complex robotic systems in practice. We demonstrate the capability of this design paradigm to achieve safe and performant perception-based autonomous operation of a quadrupedal robot both in simulation and experimentally on hardware.
Natural Multicontact Walking for Robotic Assistive Devices via Musculoskeletal Models and Hybrid Zero Dynamics
Sep 10, 2021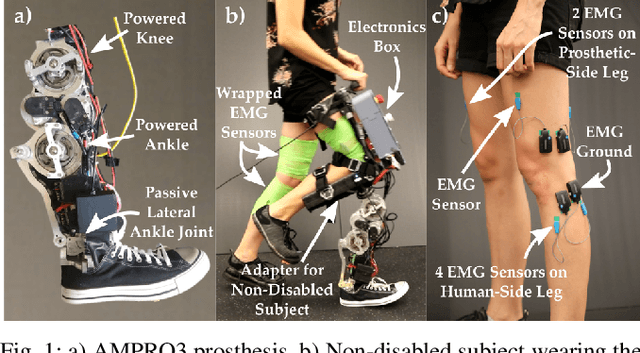
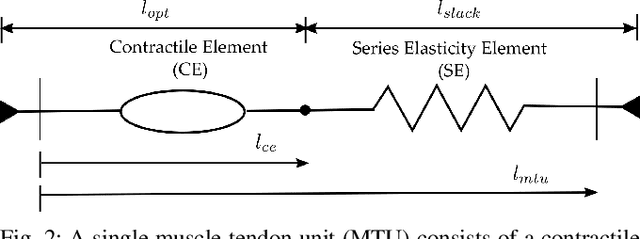
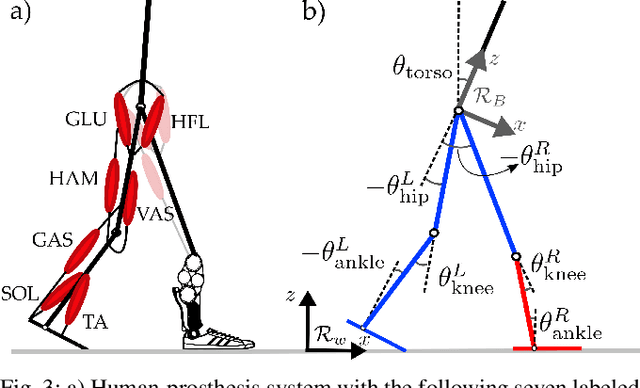
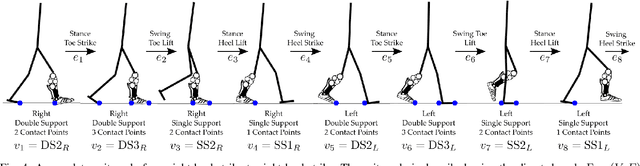
Generating provably stable walking gaits that yield natural locomotion when executed on robotic-assistive devices is a challenging task that often requires hand-tuning by domain experts. This paper presents an alternative methodology, where we propose the addition of musculoskeletal models directly into the gait generation process to intuitively shape the resulting behavior. In particular, we construct a multi-domain hybrid system model that combines the system dynamics with muscle models to represent natural multicontact walking. Stable walking gaits can then be formally generated for this model via the hybrid zero dynamics method. We experimentally apply our framework towards achieving multicontact locomotion on a dual-actuated transfemoral prosthesis, AMPRO3. The results demonstrate that enforcing feasible muscle dynamics produces gaits that yield natural locomotion (as analyzed via electromyography), without the need for extensive manual tuning. Moreover, these gaits yield similar behavior to expert-tuned gaits. We conclude that the novel approach of combining robotic walking methods (specifically HZD) with muscle models successfully generates anthropomorphic robotic-assisted locomotion.
ROIAL: Region of Interest Active Learning for Characterizing Exoskeleton Gait Preference Landscapes
Nov 09, 2020


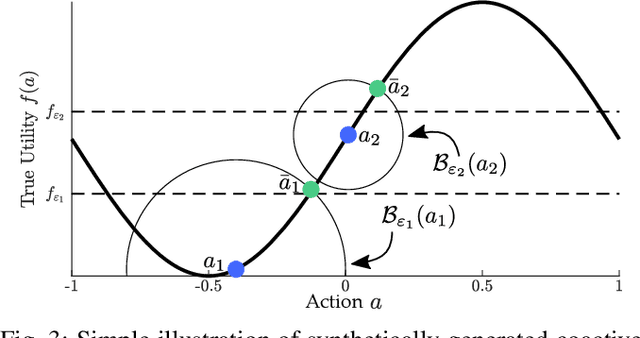
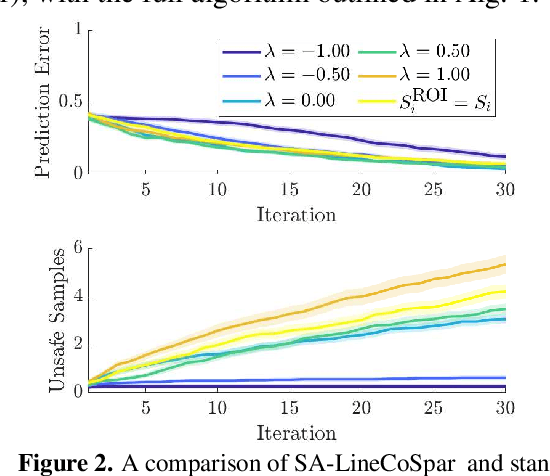
Characterizing what types of exoskeleton gaits are comfortable for users, and understanding the science of walking more generally, require recovering a user's utility landscape. Learning these landscapes is challenging, as walking trajectories are defined by numerous gait parameters, data collection from human trials is expensive, and user safety and comfort must be ensured. This work proposes the Region of Interest Active Learning (ROIAL) framework, which actively learns each user's underlying utility function over a region of interest that ensures safety and comfort. ROIAL learns from ordinal and preference feedback, which are more reliable feedback mechanisms than absolute numerical scores. The algorithm's performance is evaluated both in simulation and experimentally for three able-bodied subjects walking inside of a lower-body exoskeleton. ROIAL learns Bayesian posteriors that predict each exoskeleton user's utility landscape across four exoskeleton gait parameters. The algorithm discovers both commonalities and discrepancies across users' gait preferences and identifies the gait parameters that most influenced user feedback. These results demonstrate the feasibility of recovering gait utility landscapes from limited human trials.
Automatic quality assessment for 2D fetal sonographic standard plane based on multi-task learning
Dec 11, 2019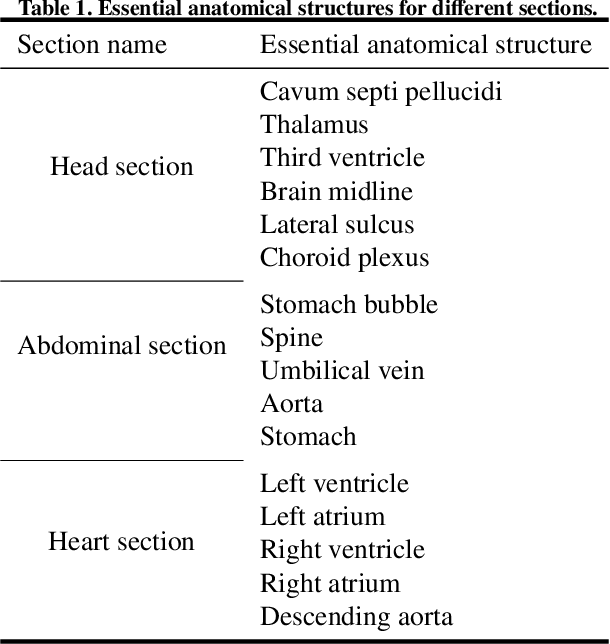
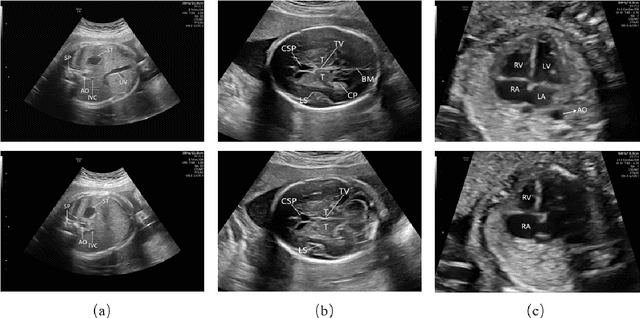
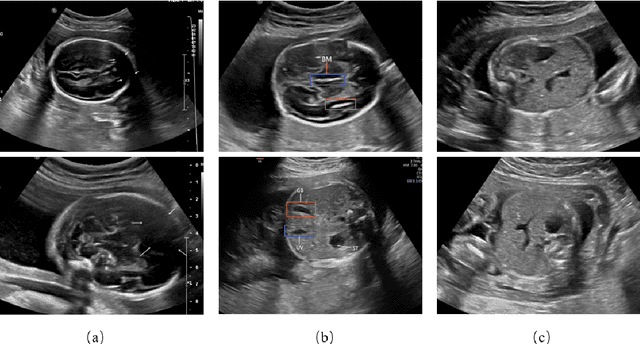
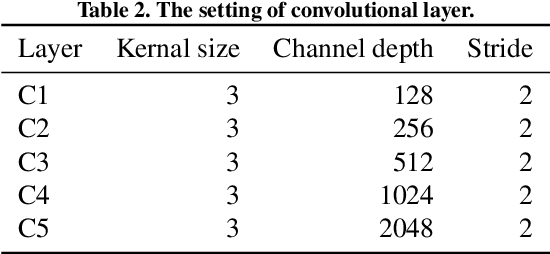
The quality control of fetal sonographic (FS) images is essential for the correct biometric measurements and fetal anomaly diagnosis. However, quality control requires professional sonographers to perform and is often labor-intensive. To solve this problem, we propose an automatic image quality assessment scheme based on multi-task learning to assist in FS image quality control. An essential criterion for FS image quality control is that all the essential anatomical structures in the section should appear full and remarkable with a clear boundary. Therefore, our scheme aims to identify those essential anatomical structures to judge whether an FS image is the standard image, which is achieved by three convolutional neural networks. The Feature Extraction Network aims to extract deep level features of FS images. Based on the extracted features, the Class Prediction Network determines whether the structure meets the standard and Region Proposal Network identifies its position. The scheme has been applied to three types of fetal sections, which are the head, abdominal, and heart. The experimental results show that our method can make a quality assessment of an FS image within less a second. Also, our method achieves competitive performance in both the detection and classification compared with state-of-the-art methods.